 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpact of ChatGPT on the writing style of condensed matter physicists
Aug 30, 2024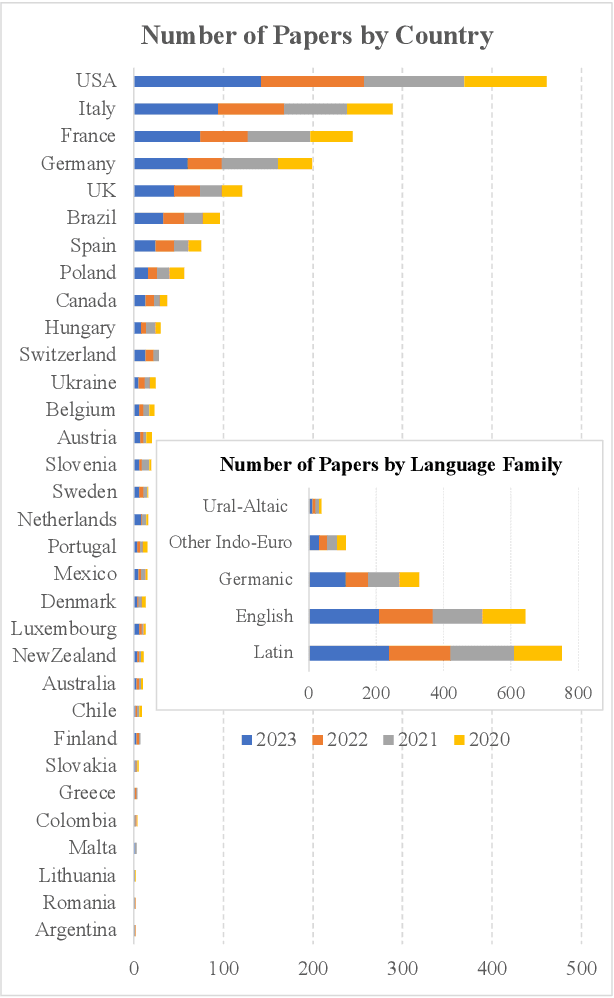
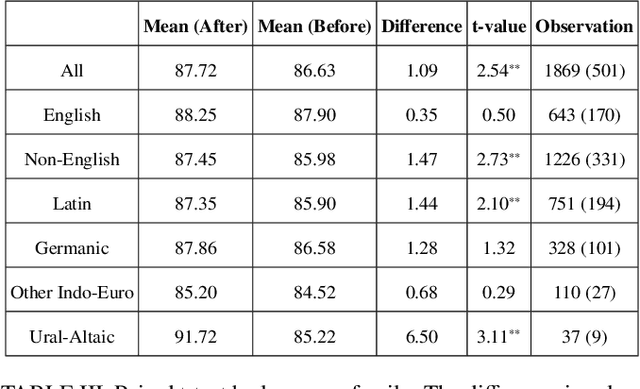
We apply a state-of-the-art difference-in-differences approach to estimate the impact of ChatGPT's release on the writing style of condensed matter papers on arXiv. Our analysis reveals a statistically significant improvement in the English quality of abstracts written by non-native English speakers. Importantly, this improvement remains robust even after accounting for other potential factors, confirming that it can be attributed to the release of ChatGPT. This indicates widespread adoption of the tool. Following the release of ChatGPT, there is a significant increase in the use of unique words, while the frequency of rare words decreases. Across language families, the changes in writing style are significant for authors from the Latin and Ural-Altaic groups, but not for those from the Germanic or other Indo-European groups.
Scaling Up Natural Language Understanding for Multi-Robots Through the Lens of Hierarchy
Aug 15, 2024



Long-horizon planning is hindered by challenges such as uncertainty accumulation, computational complexity, delayed rewards and incomplete information. This work proposes an approach to exploit the task hierarchy from human instructions to facilitate multi-robot planning. Using Large Language Models (LLMs), we propose a two-step approach to translate multi-sentence instructions into a structured language, Hierarchical Linear Temporal Logic (LTL), which serves as a formal representation for planning. Initially, LLMs transform the instructions into a hierarchical representation defined as Hierarchical Task Tree, capturing the logical and temporal relations among tasks. Following this, a domain-specific fine-tuning of LLM translates sub-tasks of each task into flat LTL formulas, aggregating them to form hierarchical LTL specifications. These specifications are then leveraged for planning using off-the-shelf planners. Our framework not only bridges the gap between instructions and algorithmic planning but also showcases the potential of LLMs in harnessing hierarchical reasoning to automate multi-robot task planning. Through evaluations in both simulation and real-world experiments involving human participants, we demonstrate that our method can handle more complex instructions compared to existing methods. The results indicate that our approach achieves higher success rates and lower costs in multi-robot task allocation and plan generation. Demos videos are available at https://youtu.be/7WOrDKxIMIs .
Robotic Planning under Hierarchical Temporal Logic Specifications
Aug 20, 2023Past research into robotic planning with temporal logic specifications, notably Linear Temporal Logic (LTL), was largely based on singular formulas for individual or groups of robots. But with increasing task complexity, LTL formulas unavoidably grow lengthy, complicating interpretation and specification generation, and straining the computational capacities of the planners. In order to maximize the potential of LTL specifications, we capitalized on the intrinsic structure of tasks and introduced a hierarchical structure to LTL specifications. In contrast to the "flat" structure, our hierarchical model has multiple levels of compositional specifications and offers benefits such as greater syntactic brevity, improved interpretability, and more efficient planning. To address tasks under this hierarchical temporal logic structure, we formulated a decomposition-based method. Each specification is first broken down into a range of temporally interrelated sub-tasks. We further mine the temporal relations among the sub-tasks of different specifications within the hierarchy. Subsequently, a Mixed Integer Linear Program is utilized to generate a spatio-temporal plan for each robot. Our hierarchical LTL specifications were experimentally applied to domains of robotic navigation and manipulation. Results from extensive simulation studies illustrated both the enhanced expressive potential of the hierarchical form and the efficacy of the proposed method.