 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePSDesigner: Automated Graphic Design with a Human-Like Creative Workflow
Mar 26, 2026Graphic design is a creative and innovative process that plays a crucial role in applications such as e-commerce and advertising. However, developing an automated design system that can faithfully translate user intentions into editable design files remains an open challenge. Although recent studies have leveraged powerful text-to-image models and MLLMs to assist graphic design, they typically simplify professional workflows, resulting in limited flexibility and intuitiveness. To address these limitations, we propose PSDesigner, an automated graphic design system that emulates the creative workflow of human designers. Building upon multiple specialized components, PSDesigner collects theme-related assets based on user instructions, and autonomously infers and executes tool calls to manipulate design files, such as integrating new assets or refining inferior elements. To endow the system with strong tool-use capabilities, we construct a design dataset, CreativePSD, which contains a large amount of high-quality PSD design files annotated with operation traces across a wide range of design scenarios and artistic styles, enabling models to learn expert design procedures. Extensive experiments demonstrate that PSDesigner outperforms existing methods across diverse graphic design tasks, empowering non-specialists to conveniently create production-quality designs.
MedMCP-Calc: Benchmarking LLMs for Realistic Medical Calculator Scenarios via MCP Integration
Jan 30, 2026Medical calculators are fundamental to quantitative, evidence-based clinical practice. However, their real-world use is an adaptive, multi-stage process, requiring proactive EHR data acquisition, scenario-dependent calculator selection, and multi-step computation, whereas current benchmarks focus only on static single-step calculations with explicit instructions. To address these limitations, we introduce MedMCP-Calc, the first benchmark for evaluating LLMs in realistic medical calculator scenarios through Model Context Protocol (MCP) integration. MedMCP-Calc comprises 118 scenario tasks across 4 clinical domains, featuring fuzzy task descriptions mimicking natural queries, structured EHR database interaction, external reference retrieval, and process-level evaluation. Our evaluation of 23 leading models reveals critical limitations: even top performers like Claude Opus 4.5 exhibit substantial gaps, including difficulty selecting appropriate calculators for end-to-end workflows given fuzzy queries, poor performance in iterative SQL-based database interactions, and marked reluctance to leverage external tools for numerical computation. Performance also varies considerably across clinical domains. Building on these findings, we develop CalcMate, a fine-tuned model incorporating scenario planning and tool augmentation, achieving state-of-the-art performance among open-source models. Benchmark and Codes are available in https://github.com/SPIRAL-MED/MedMCP-Calc.
DiagnosisArena: Benchmarking Diagnostic Reasoning for Large Language Models
May 20, 2025The emergence of groundbreaking large language models capable of performing complex reasoning tasks holds significant promise for addressing various scientific challenges, including those arising in complex clinical scenarios. To enable their safe and effective deployment in real-world healthcare settings, it is urgently necessary to benchmark the diagnostic capabilities of current models systematically. Given the limitations of existing medical benchmarks in evaluating advanced diagnostic reasoning, we present DiagnosisArena, a comprehensive and challenging benchmark designed to rigorously assess professional-level diagnostic competence. DiagnosisArena consists of 1,113 pairs of segmented patient cases and corresponding diagnoses, spanning 28 medical specialties, deriving from clinical case reports published in 10 top-tier medical journals. The benchmark is developed through a meticulous construction pipeline, involving multiple rounds of screening and review by both AI systems and human experts, with thorough checks conducted to prevent data leakage. Our study reveals that even the most advanced reasoning models, o3-mini, o1, and DeepSeek-R1, achieve only 45.82%, 31.09%, and 17.79% accuracy, respectively. This finding highlights a significant generalization bottleneck in current large language models when faced with clinical diagnostic reasoning challenges. Through DiagnosisArena, we aim to drive further advancements in AIs diagnostic reasoning capabilities, enabling more effective solutions for real-world clinical diagnostic challenges. We provide the benchmark and evaluation tools for further research and development https://github.com/SPIRAL-MED/DiagnosisArena.
Scaling Up Natural Language Understanding for Multi-Robots Through the Lens of Hierarchy
Aug 15, 2024



Long-horizon planning is hindered by challenges such as uncertainty accumulation, computational complexity, delayed rewards and incomplete information. This work proposes an approach to exploit the task hierarchy from human instructions to facilitate multi-robot planning. Using Large Language Models (LLMs), we propose a two-step approach to translate multi-sentence instructions into a structured language, Hierarchical Linear Temporal Logic (LTL), which serves as a formal representation for planning. Initially, LLMs transform the instructions into a hierarchical representation defined as Hierarchical Task Tree, capturing the logical and temporal relations among tasks. Following this, a domain-specific fine-tuning of LLM translates sub-tasks of each task into flat LTL formulas, aggregating them to form hierarchical LTL specifications. These specifications are then leveraged for planning using off-the-shelf planners. Our framework not only bridges the gap between instructions and algorithmic planning but also showcases the potential of LLMs in harnessing hierarchical reasoning to automate multi-robot task planning. Through evaluations in both simulation and real-world experiments involving human participants, we demonstrate that our method can handle more complex instructions compared to existing methods. The results indicate that our approach achieves higher success rates and lower costs in multi-robot task allocation and plan generation. Demos videos are available at https://youtu.be/7WOrDKxIMIs .
See the World through Network Cameras
Apr 14, 2019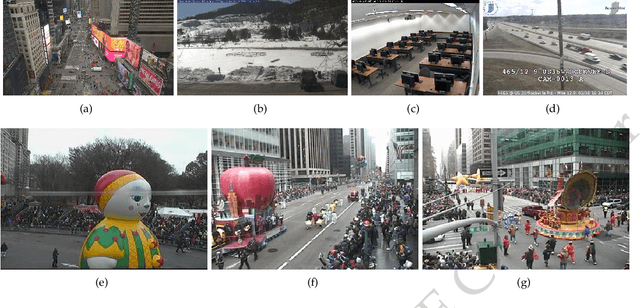
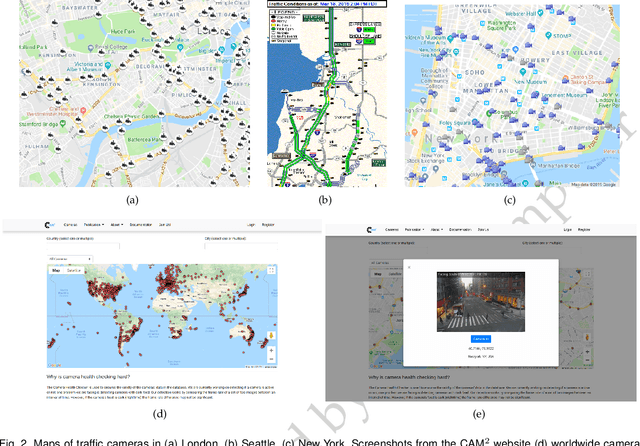
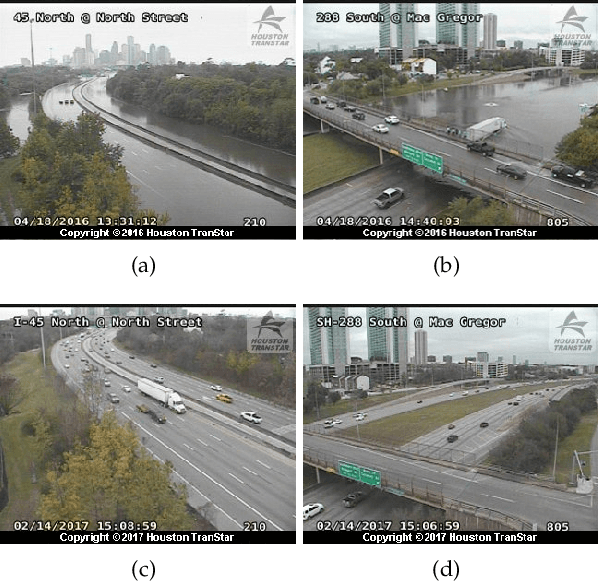

Millions of network cameras have been deployed worldwide. Real-time data from many network cameras can offer instant views of multiple locations with applications in public safety, transportation management, urban planning, agriculture, forestry, social sciences, atmospheric information, and more. This paper describes the real-time data available from worldwide network cameras and potential applications. Second, this paper outlines the CAM2 System available to users at https://www.cam2project.net/. This information includes strategies to discover network cameras and create the camera database, user interface, and computing platforms. Third, this paper describes many opportunities provided by data from network cameras and challenges to be addressed.