 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal Logic Task Allocation in Heterogeneous Multi-Robot Systems
Paper and Code
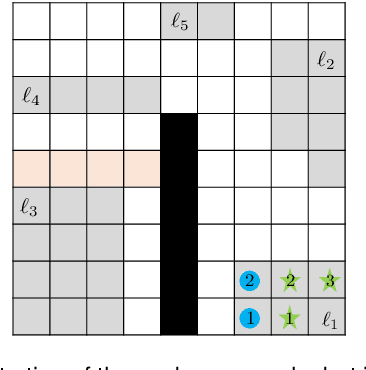

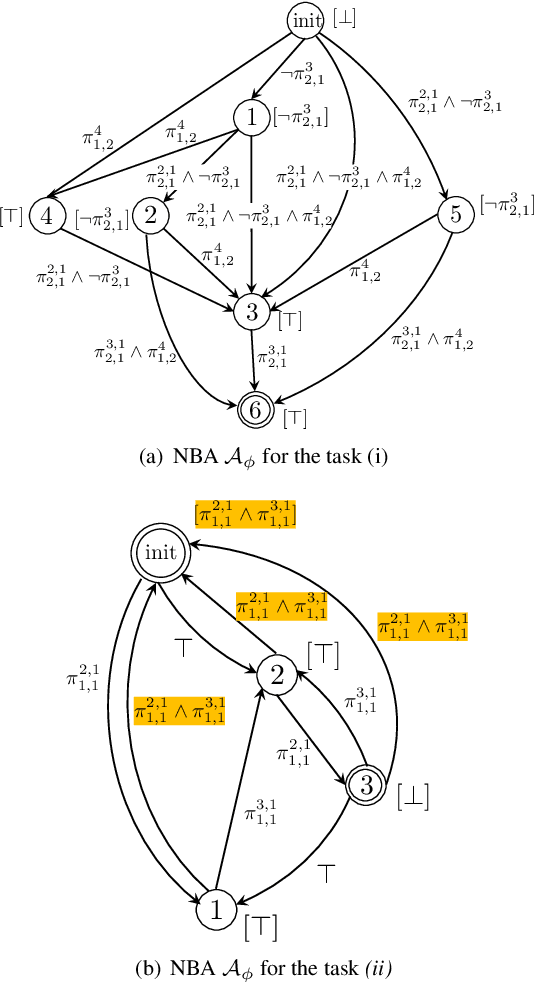
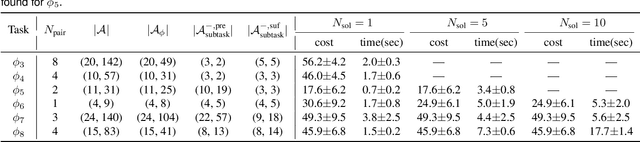
In this paper, we consider the problem of optimally allocating tasks, expressed as global Linear Temporal Logic (LTL) specifications, to teams of heterogeneous mobile robots. The robots are classified in different types that capture their different capabilities, and each task may require robots of multiple types. The specific robots assigned to each task are immaterial, as long as they are of the desired type. Given a discrete workspace, our goal is to design paths, i.e., sequences of discrete states, for the robots so that the LTL specification is satisfied. To obtain a scalable solution to this complex temporal logic task allocation problem, we propose a hierarchical approach that first allocates specific robots to tasks using the information about the tasks contained in the Nondeterministic Buchi Automaton (NBA) that captures the LTL specification, and then designs low-level executable plans for the robots that respect the high-level assignment. Specifically, we first prune and relax the NBA by removing all negative atomic propositions. This step is motivated by "lazy collision checking" methods in robotics and allows to simplify the planning problem by checking constraint satisfaction only when needed. Then, we extract sequences of subtasks from the relaxed NBA along with their temporal orders, and formulate a Mixed Integer Linear Program (MILP) to allocate these subtasks to the robots. Finally, we define generalized multi-robot path planning problems to obtain low-level executable robot plans that satisfy both the high-level task allocation and the temporal constraints captured by the negative atomic propositions in the original NBA. We provide theoretical results showing completeness and soundness of our proposed method and present numerical simulations demonstrating that our method can generate robot paths with lower cost, considerably faster than existing methods.