 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeteroCache: A Dynamic Retrieval Approach to Heterogeneous KV Cache Compression for Long-Context LLM Inference
Jan 20, 2026The linear memory growth of the KV cache poses a significant bottleneck for LLM inference in long-context tasks. Existing static compression methods often fail to preserve globally important information, principally because they overlook the attention drift phenomenon where token significance evolves dynamically. Although recent dynamic retrieval approaches attempt to address this issue, they typically suffer from coarse-grained caching strategies and incur high I/O overhead due to frequent data transfers. To overcome these limitations, we propose HeteroCache, a training-free dynamic compression framework. Our method is built on two key insights: attention heads exhibit diverse temporal heterogeneity, and there is significant spatial redundancy among heads within the same layer. Guided by these insights, HeteroCache categorizes heads based on stability and redundancy. Consequently, we apply a fine-grained weighting strategy that allocates larger cache budgets to heads with rapidly shifting attention to capture context changes, thereby addressing the inefficiency of coarse-grained strategies. Furthermore, we employ a hierarchical storage mechanism in which a subset of representative heads monitors attention shift, and trigger an asynchronous, on-demand retrieval of contexts from the CPU, effectively hiding I/O latency. Finally, experiments demonstrate that HeteroCache achieves state-of-the-art performance on multiple long-context benchmarks and accelerates decoding by up to $3\times$ compared to the original model in the 224K context. Our code will be open-source.
HEAPr: Hessian-based Efficient Atomic Expert Pruning in Output Space
Sep 26, 2025Mixture-of-Experts (MoE) architectures in large language models (LLMs) deliver exceptional performance and reduced inference costs compared to dense LLMs. However, their large parameter counts result in prohibitive memory requirements, limiting practical deployment. While existing pruning methods primarily focus on expert-level pruning, this coarse granularity often leads to substantial accuracy degradation. In this work, we introduce HEAPr, a novel pruning algorithm that decomposes experts into smaller, indivisible atomic experts, enabling more precise and flexible atomic expert pruning. To measure the importance of each atomic expert, we leverage second-order information based on principles similar to Optimal Brain Surgeon (OBS) theory. To address the computational and storage challenges posed by second-order information, HEAPr exploits the inherent properties of atomic experts to transform the second-order information from expert parameters into that of atomic expert parameters, and further simplifies it to the second-order information of atomic expert outputs. This approach reduces the space complexity from $O(d^4)$, where d is the model's dimensionality, to $O(d^2)$. HEAPr requires only two forward passes and one backward pass on a small calibration set to compute the importance of atomic experts. Extensive experiments on MoE models, including DeepSeek MoE and Qwen MoE family, demonstrate that HEAPr outperforms existing expert-level pruning methods across a wide range of compression ratios and benchmarks. Specifically, HEAPr achieves nearly lossless compression at compression ratios of 20% ~ 25% in most models, while also reducing FLOPs nearly by 20%. The code can be found at \href{https://github.com/LLIKKE/HEAPr}{https://github.com/LLIKKE/HEAPr}.
Maestro: Joint Graph & Config Optimization for Reliable AI Agents
Sep 04, 2025Building reliable LLM agents requires decisions at two levels: the graph (which modules exist and how information flows) and the configuration of each node (models, prompts, tools, control knobs). Most existing optimizers tune configurations while holding the graph fixed, leaving structural failure modes unaddressed. We introduce Maestro, a framework-agnostic holistic optimizer for LLM agents that jointly searches over graphs and configurations to maximize agent quality, subject to explicit rollout/token budgets. Beyond numeric metrics, Maestro leverages reflective textual feedback from traces to prioritize edits, improving sample efficiency and targeting specific failure modes. On the IFBench and HotpotQA benchmarks, Maestro consistently surpasses leading prompt optimizers--MIPROv2, GEPA, and GEPA+Merge--by an average of 12%, 4.9%, and 4.86%, respectively; even when restricted to prompt-only optimization, it still leads by 9.65%, 2.37%, and 2.41%. Maestro achieves these results with far fewer rollouts than GEPA. We further show large gains on two applications (interviewer & RAG agents), highlighting that joint graph & configuration search addresses structural failure modes that prompt tuning alone cannot fix.
GeoCAD: Local Geometry-Controllable CAD Generation
Jun 12, 2025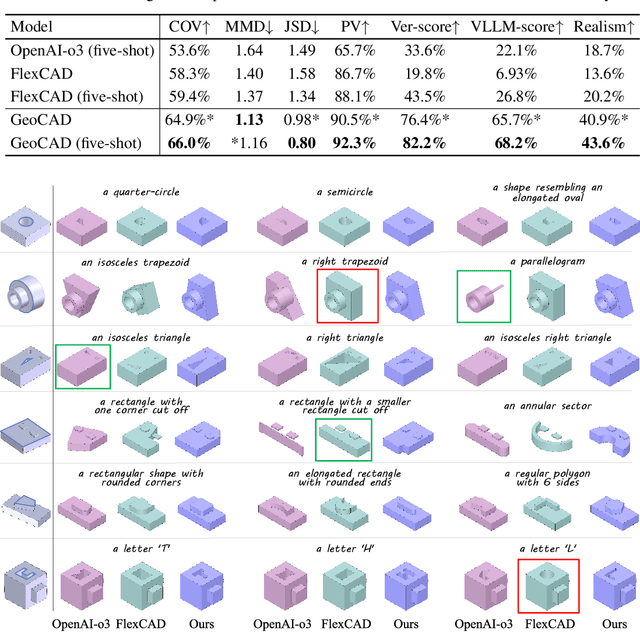
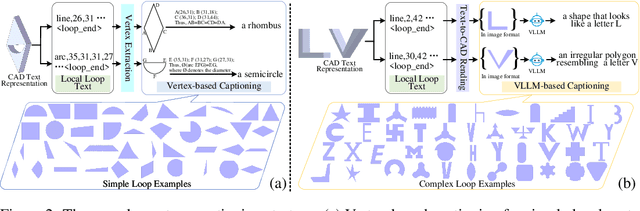
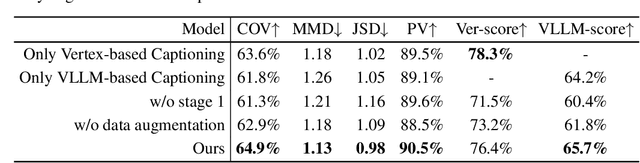

Local geometry-controllable computer-aided design (CAD) generation aims to modify local parts of CAD models automatically, enhancing design efficiency. It also ensures that the shapes of newly generated local parts follow user-specific geometric instructions (e.g., an isosceles right triangle or a rectangle with one corner cut off). However, existing methods encounter challenges in achieving this goal. Specifically, they either lack the ability to follow textual instructions or are unable to focus on the local parts. To address this limitation, we introduce GeoCAD, a user-friendly and local geometry-controllable CAD generation method. Specifically, we first propose a complementary captioning strategy to generate geometric instructions for local parts. This strategy involves vertex-based and VLLM-based captioning for systematically annotating simple and complex parts, respectively. In this way, we caption $\sim$221k different local parts in total. In the training stage, given a CAD model, we randomly mask a local part. Then, using its geometric instruction and the remaining parts as input, we prompt large language models (LLMs) to predict the masked part. During inference, users can specify any local part for modification while adhering to a variety of predefined geometric instructions. Extensive experiments demonstrate the effectiveness of GeoCAD in generation quality, validity and text-to-CAD consistency. Code will be available at https://github.com/Zhanwei-Z/GeoCAD.
HieraEdgeNet: A Multi-Scale Edge-Enhanced Framework for Automated Pollen Recognition
Jun 09, 2025Automated pollen recognition is vital to paleoclimatology, biodiversity monitoring, and public health, yet conventional methods are hampered by inefficiency and subjectivity. Existing deep learning models often struggle to achieve the requisite localization accuracy for microscopic targets like pollen, which are characterized by their minute size, indistinct edges, and complex backgrounds. To overcome this limitation, we introduce HieraEdgeNet, a multi-scale edge-enhancement framework. The framework's core innovation is the introduction of three synergistic modules: the Hierarchical Edge Module (HEM), which explicitly extracts a multi-scale pyramid of edge features that corresponds to the semantic hierarchy at early network stages; the Synergistic Edge Fusion (SEF) module, for deeply fusing these edge priors with semantic information at each respective scale; and the Cross Stage Partial Omni-Kernel Module (CSPOKM), which maximally refines the most detail-rich feature layers using an Omni-Kernel operator - comprising anisotropic large-kernel convolutions and mixed-domain attention - all within a computationally efficient Cross-Stage Partial (CSP) framework. On a large-scale dataset comprising 120 pollen classes, HieraEdgeNet achieves a mean Average Precision (mAP@.5) of 0.9501, significantly outperforming state-of-the-art baseline models such as YOLOv12n and RT-DETR. Furthermore, qualitative analysis confirms that our approach generates feature representations that are more precisely focused on object boundaries. By systematically integrating edge information, HieraEdgeNet provides a robust and powerful solution for high-precision, high-efficiency automated detection of microscopic objects.
DyePack: Provably Flagging Test Set Contamination in LLMs Using Backdoors
May 29, 2025Open benchmarks are essential for evaluating and advancing large language models, offering reproducibility and transparency. However, their accessibility makes them likely targets of test set contamination. In this work, we introduce DyePack, a framework that leverages backdoor attacks to identify models that used benchmark test sets during training, without requiring access to the loss, logits, or any internal details of the model. Like how banks mix dye packs with their money to mark robbers, DyePack mixes backdoor samples with the test data to flag models that trained on it. We propose a principled design incorporating multiple backdoors with stochastic targets, enabling exact false positive rate (FPR) computation when flagging every model. This provably prevents false accusations while providing strong evidence for every detected case of contamination. We evaluate DyePack on five models across three datasets, covering both multiple-choice and open-ended generation tasks. For multiple-choice questions, it successfully detects all contaminated models with guaranteed FPRs as low as 0.000073% on MMLU-Pro and 0.000017% on Big-Bench-Hard using eight backdoors. For open-ended generation tasks, it generalizes well and identifies all contaminated models on Alpaca with a guaranteed false positive rate of just 0.127% using six backdoors.
Gaming Tool Preferences in Agentic LLMs
May 23, 2025Large language models (LLMs) can now access a wide range of external tools, thanks to the Model Context Protocol (MCP). This greatly expands their abilities as various agents. However, LLMs rely entirely on the text descriptions of tools to decide which ones to use--a process that is surprisingly fragile. In this work, we expose a vulnerability in prevalent tool/function-calling protocols by investigating a series of edits to tool descriptions, some of which can drastically increase a tool's usage from LLMs when competing with alternatives. Through controlled experiments, we show that tools with properly edited descriptions receive over 10 times more usage from GPT-4.1 and Qwen2.5-7B than tools with original descriptions. We further evaluate how various edits to tool descriptions perform when competing directly with one another and how these trends generalize or differ across a broader set of 10 different models. These phenomenons, while giving developers a powerful way to promote their tools, underscore the need for a more reliable foundation for agentic LLMs to select and utilize tools and resources.
Chain-of-Defensive-Thought: Structured Reasoning Elicits Robustness in Large Language Models against Reference Corruption
Apr 29, 2025Chain-of-thought prompting has demonstrated great success in facilitating the reasoning abilities of large language models. In this work, we explore how these enhanced reasoning abilities can be exploited to improve the robustness of large language models in tasks that are not necessarily reasoning-focused. In particular, we show how a wide range of large language models exhibit significantly improved robustness against reference corruption using a simple method called chain-of-defensive-thought, where only a few exemplars with structured and defensive reasoning are provided as demonstrations. Empirically, the improvements can be astounding, especially given the simplicity and applicability of the method. For example, in the Natural Questions task, the accuracy of GPT-4o degrades from 60% to as low as 3% with standard prompting when 1 out of 10 references provided is corrupted with prompt injection attacks. In contrast, GPT-4o using chain-of-defensive-thought prompting maintains an accuracy of 50%.
Sample-level Adaptive Knowledge Distillation for Action Recognition
Apr 01, 2025Knowledge Distillation (KD) compresses neural networks by learning a small network (student) via transferring knowledge from a pre-trained large network (teacher). Many endeavours have been devoted to the image domain, while few works focus on video analysis which desires training much larger model making it be hardly deployed in resource-limited devices. However, traditional methods neglect two important problems, i.e., 1) Since the capacity gap between the teacher and the student exists, some knowledge w.r.t. difficult-to-transfer samples cannot be correctly transferred, or even badly affects the final performance of student, and 2) As training progresses, difficult-to-transfer samples may become easier to learn, and vice versa. To alleviate the two problems, we propose a Sample-level Adaptive Knowledge Distillation (SAKD) framework for action recognition. In particular, it mainly consists of the sample distillation difficulty evaluation module and the sample adaptive distillation module. The former applies the temporal interruption to frames, i.e., randomly dropout or shuffle the frames during training, which increases the learning difficulty of samples during distillation, so as to better discriminate their distillation difficulty. The latter module adaptively adjusts distillation ratio at sample level, such that KD loss dominates the training with easy-to-transfer samples while vanilla loss dominates that with difficult-to-transfer samples. More importantly, we only select those samples with both low distillation difficulty and high diversity to train the student model for reducing computational cost. Experimental results on two video benchmarks and one image benchmark demonstrate the superiority of the proposed method by striking a good balance between performance and efficiency.
Improving Complex Reasoning with Dynamic Prompt Corruption: A soft prompt Optimization Approach
Mar 17, 2025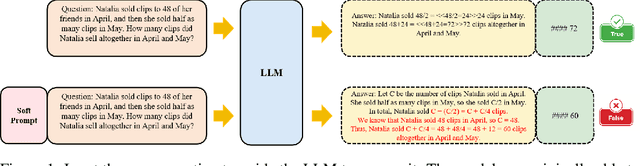

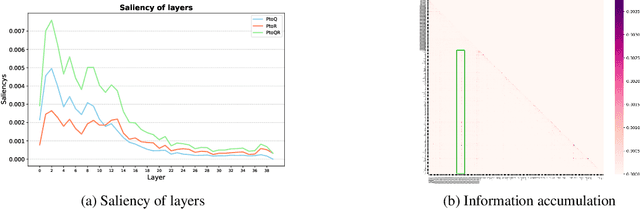

Prompt-tuning (PT) for large language models (LLMs) can facilitate the performance on various conventional NLP tasks with significantly fewer trainable parameters. However, our investigation reveals that PT provides limited improvement and may even degrade the primitive performance of LLMs on complex reasoning tasks. Such a phenomenon suggests that soft prompts can positively impact certain instances while negatively affecting others, particularly during the later phases of reasoning. To address these challenges, We first identify an information accumulation within the soft prompts. Through detailed analysis, we demonstrate that this phenomenon is often accompanied by erroneous information flow patterns in the deeper layers of the model, which ultimately lead to incorrect reasoning outcomes. we propose a novel method called \textbf{D}ynamic \textbf{P}rompt \textbf{C}orruption (DPC) to take better advantage of soft prompts in complex reasoning tasks, which dynamically adjusts the influence of soft prompts based on their impact on the reasoning process. Specifically, DPC consists of two stages: Dynamic Trigger and Dynamic Corruption. First, Dynamic Trigger measures the impact of soft prompts, identifying whether beneficial or detrimental. Then, Dynamic Corruption mitigates the negative effects of soft prompts by selectively masking key tokens that interfere with the reasoning process. We validate the proposed approach through extensive experiments on various LLMs and reasoning tasks, including GSM8K, MATH, and AQuA. Experimental results demonstrate that DPC can consistently enhance the performance of PT, achieving 4\%-8\% accuracy gains compared to vanilla prompt tuning, highlighting the effectiveness of our approach and its potential to enhance complex reasoning in LLMs.