 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge4D-CAAL: 4D Radar-Camera Calibration and Auto-Labeling for Autonomous Driving
Jan 29, 20264D radar has emerged as a critical sensor for autonomous driving, primarily due to its enhanced capabilities in elevation measurement and higher resolution compared to traditional 3D radar. Effective integration of 4D radar with cameras requires accurate extrinsic calibration, and the development of radar-based perception algorithms demands large-scale annotated datasets. However, existing calibration methods often employ separate targets optimized for either visual or radar modalities, complicating correspondence establishment. Furthermore, manually labeling sparse radar data is labor-intensive and unreliable. To address these challenges, we propose 4D-CAAL, a unified framework for 4D radar-camera calibration and auto-labeling. Our approach introduces a novel dual-purpose calibration target design, integrating a checkerboard pattern on the front surface for camera detection and a corner reflector at the center of the back surface for radar detection. We develop a robust correspondence matching algorithm that aligns the checkerboard center with the strongest radar reflection point, enabling accurate extrinsic calibration. Subsequently, we present an auto-labeling pipeline that leverages the calibrated sensor relationship to transfer annotations from camera-based segmentations to radar point clouds through geometric projection and multi-feature optimization. Extensive experiments demonstrate that our method achieves high calibration accuracy while significantly reducing manual annotation effort, thereby accelerating the development of robust multi-modal perception systems for autonomous driving.
MMDrive: Interactive Scene Understanding Beyond Vision with Multi-representational Fusion
Dec 16, 2025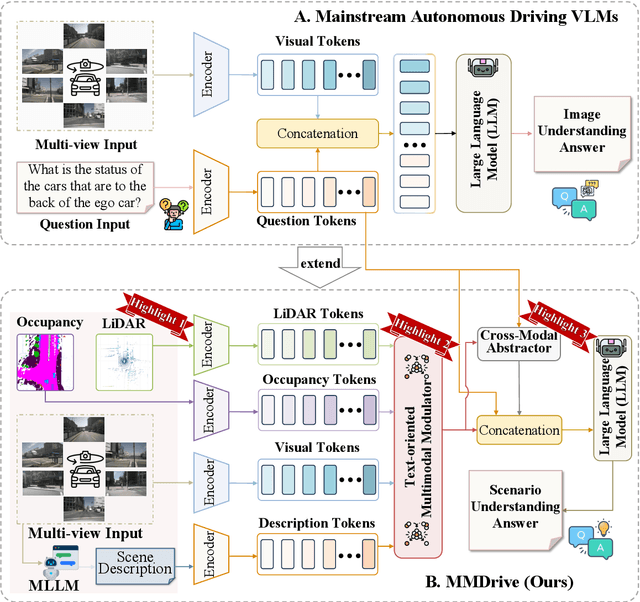
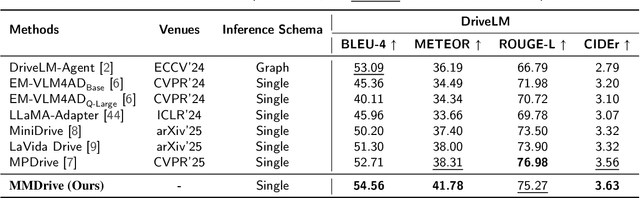
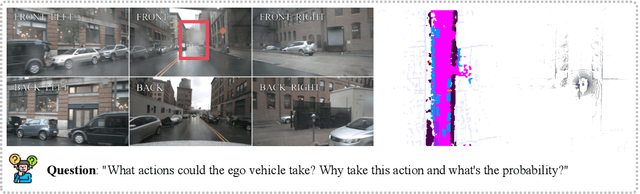

Vision-language models enable the understanding and reasoning of complex traffic scenarios through multi-source information fusion, establishing it as a core technology for autonomous driving. However, existing vision-language models are constrained by the image understanding paradigm in 2D plane, which restricts their capability to perceive 3D spatial information and perform deep semantic fusion, resulting in suboptimal performance in complex autonomous driving environments. This study proposes MMDrive, an multimodal vision-language model framework that extends traditional image understanding to a generalized 3D scene understanding framework. MMDrive incorporates three complementary modalities, including occupancy maps, LiDAR point clouds, and textual scene descriptions. To this end, it introduces two novel components for adaptive cross-modal fusion and key information extraction. Specifically, the Text-oriented Multimodal Modulator dynamically weights the contributions of each modality based on the semantic cues in the question, guiding context-aware feature integration. The Cross-Modal Abstractor employs learnable abstract tokens to generate compact, cross-modal summaries that highlight key regions and essential semantics. Comprehensive evaluations on the DriveLM and NuScenes-QA benchmarks demonstrate that MMDrive achieves significant performance gains over existing vision-language models for autonomous driving, with a BLEU-4 score of 54.56 and METEOR of 41.78 on DriveLM, and an accuracy score of 62.7% on NuScenes-QA. MMDrive effectively breaks the traditional image-only understanding barrier, enabling robust multimodal reasoning in complex driving environments and providing a new foundation for interpretable autonomous driving scene understanding.
GuardFed: A Trustworthy Federated Learning Framework Against Dual-Facet Attacks
Nov 12, 2025Federated learning (FL) enables privacy-preserving collaborative model training but remains vulnerable to adversarial behaviors that compromise model utility or fairness across sensitive groups. While extensive studies have examined attacks targeting either objective, strategies that simultaneously degrade both utility and fairness remain largely unexplored. To bridge this gap, we introduce the Dual-Facet Attack (DFA), a novel threat model that concurrently undermines predictive accuracy and group fairness. Two variants, Synchronous DFA (S-DFA) and Split DFA (Sp-DFA), are further proposed to capture distinct real-world collusion scenarios. Experimental results show that existing robust FL defenses, including hybrid aggregation schemes, fail to resist DFAs effectively. To counter these threats, we propose GuardFed, a self-adaptive defense framework that maintains a fairness-aware reference model using a small amount of clean server data augmented with synthetic samples. In each training round, GuardFed computes a dual-perspective trust score for every client by jointly evaluating its utility deviation and fairness degradation, thereby enabling selective aggregation of trustworthy updates. Extensive experiments on real-world datasets demonstrate that GuardFed consistently preserves both accuracy and fairness under diverse non-IID and adversarial conditions, achieving state-of-the-art performance compared with existing robust FL methods.
An Integrated Fusion Framework for Ensemble Learning Leveraging Gradient Boosting and Fuzzy Rule-Based Models
Nov 11, 2025The integration of different learning paradigms has long been a focus of machine learning research, aimed at overcoming the inherent limitations of individual methods. Fuzzy rule-based models excel in interpretability and have seen widespread application across diverse fields. However, they face challenges such as complex design specifications and scalability issues with large datasets. The fusion of different techniques and strategies, particularly Gradient Boosting, with Fuzzy Rule-Based Models offers a robust solution to these challenges. This paper proposes an Integrated Fusion Framework that merges the strengths of both paradigms to enhance model performance and interpretability. At each iteration, a Fuzzy Rule-Based Model is constructed and controlled by a dynamic factor to optimize its contribution to the overall ensemble. This control factor serves multiple purposes: it prevents model dominance, encourages diversity, acts as a regularization parameter, and provides a mechanism for dynamic tuning based on model performance, thus mitigating the risk of overfitting. Additionally, the framework incorporates a sample-based correction mechanism that allows for adaptive adjustments based on feedback from a validation set. Experimental results substantiate the efficacy of the presented gradient boosting framework for fuzzy rule-based models, demonstrating performance enhancement, especially in terms of mitigating overfitting and complexity typically associated with many rules. By leveraging an optimal factor to govern the contribution of each model, the framework improves performance, maintains interpretability, and simplifies the maintenance and update of the models.
Affine Modulation-based Audiogram Fusion Network for Joint Noise Reduction and Hearing Loss Compensation
Sep 09, 2025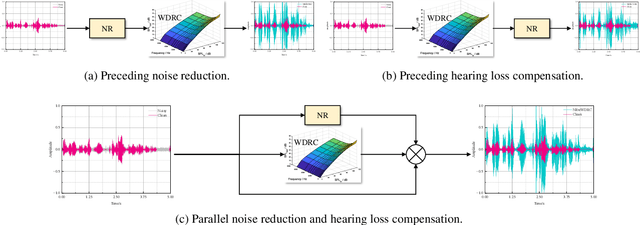
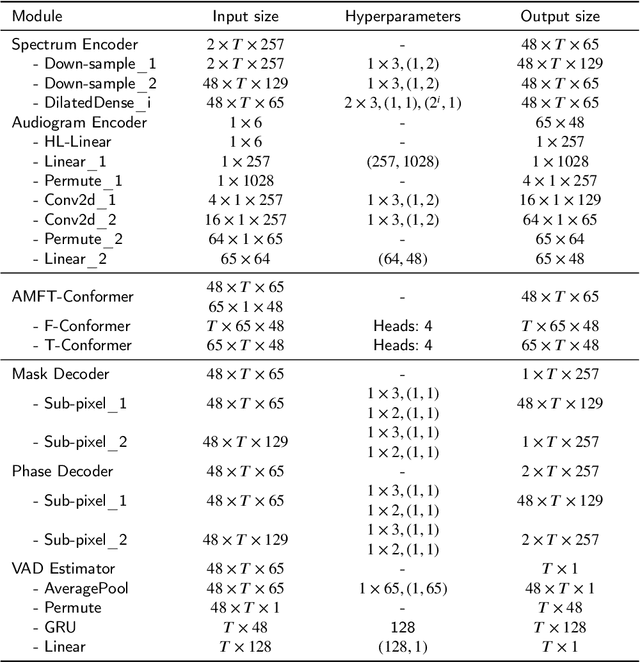
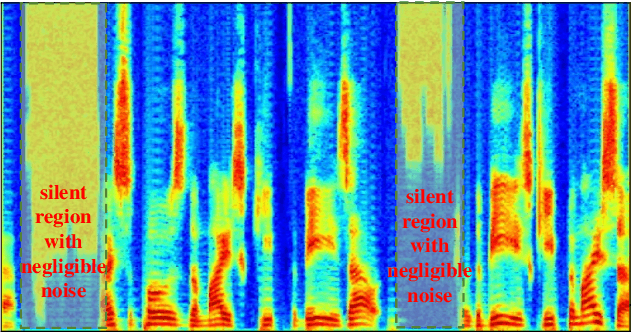
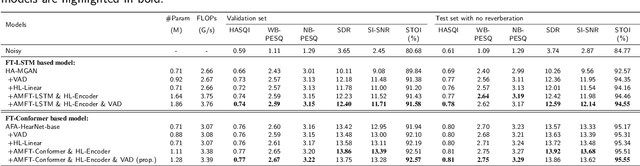
Hearing aids (HAs) are widely used to provide personalized speech enhancement (PSE) services, improving the quality of life for individuals with hearing loss. However, HA performance significantly declines in noisy environments as it treats noise reduction (NR) and hearing loss compensation (HLC) as separate tasks. This separation leads to a lack of systematic optimization, overlooking the interactions between these two critical tasks, and increases the system complexity. To address these challenges, we propose a novel audiogram fusion network, named AFN-HearNet, which simultaneously tackles the NR and HLC tasks by fusing cross-domain audiogram and spectrum features. We propose an audiogram-specific encoder that transforms the sparse audiogram profile into a deep representation, addressing the alignment problem of cross-domain features prior to fusion. To incorporate the interactions between NR and HLC tasks, we propose the affine modulation-based audiogram fusion frequency-temporal Conformer that adaptively fuses these two features into a unified deep representation for speech reconstruction. Furthermore, we introduce a voice activity detection auxiliary training task to embed speech and non-speech patterns into the unified deep representation implicitly. We conduct comprehensive experiments across multiple datasets to validate the effectiveness of each proposed module. The results indicate that the AFN-HearNet significantly outperforms state-of-the-art in-context fusion joint models regarding key metrics such as HASQI and PESQ, achieving a considerable trade-off between performance and efficiency. The source code and data will be released at https://github.com/deepnetni/AFN-HearNet.
MyGO: Make your Goals Obvious, Avoiding Semantic Confusion in Prostate Cancer Lesion Region Segmentation
Jul 23, 2025Early diagnosis and accurate identification of lesion location and progression in prostate cancer (PCa) are critical for assisting clinicians in formulating effective treatment strategies. However, due to the high semantic homogeneity between lesion and non-lesion areas, existing medical image segmentation methods often struggle to accurately comprehend lesion semantics, resulting in the problem of semantic confusion. To address this challenge, we propose a novel Pixel Anchor Module, which guides the model to discover a sparse set of feature anchors that serve to capture and interpret global contextual information. This mechanism enhances the model's nonlinear representation capacity and improves segmentation accuracy within lesion regions. Moreover, we design a self-attention-based Top_k selection strategy to further refine the identification of these feature anchors, and incorporate a focal loss function to mitigate class imbalance, thereby facilitating more precise semantic interpretation across diverse regions. Our method achieves state-of-the-art performance on the PI-CAI dataset, demonstrating 69.73% IoU and 74.32% Dice scores, and significantly improving prostate cancer lesion detection.
Zero-Shot Event Causality Identification via Multi-source Evidence Fuzzy Aggregation with Large Language Models
Jun 06, 2025



Event Causality Identification (ECI) aims to detect causal relationships between events in textual contexts. Existing ECI models predominantly rely on supervised methodologies, suffering from dependence on large-scale annotated data. Although Large Language Models (LLMs) enable zero-shot ECI, they are prone to causal hallucination-erroneously establishing spurious causal links. To address these challenges, we propose MEFA, a novel zero-shot framework based on Multi-source Evidence Fuzzy Aggregation. First, we decompose causality reasoning into three main tasks (temporality determination, necessity analysis, and sufficiency verification) complemented by three auxiliary tasks. Second, leveraging meticulously designed prompts, we guide LLMs to generate uncertain responses and deterministic outputs. Finally, we quantify LLM's responses of sub-tasks and employ fuzzy aggregation to integrate these evidence for causality scoring and causality determination. Extensive experiments on three benchmarks demonstrate that MEFA outperforms second-best unsupervised baselines by 6.2% in F1-score and 9.3% in precision, while significantly reducing hallucination-induced errors. In-depth analysis verify the effectiveness of task decomposition and the superiority of fuzzy aggregation.
OptiPMB: Enhancing 3D Multi-Object Tracking with Optimized Poisson Multi-Bernoulli Filtering
Mar 17, 2025Accurate 3D multi-object tracking (MOT) is crucial for autonomous driving, as it enables robust perception, navigation, and planning in complex environments. While deep learning-based solutions have demonstrated impressive 3D MOT performance, model-based approaches remain appealing for their simplicity, interpretability, and data efficiency. Conventional model-based trackers typically rely on random vector-based Bayesian filters within the tracking-by-detection (TBD) framework but face limitations due to heuristic data association and track management schemes. In contrast, random finite set (RFS)-based Bayesian filtering handles object birth, survival, and death in a theoretically sound manner, facilitating interpretability and parameter tuning. In this paper, we present OptiPMB, a novel RFS-based 3D MOT method that employs an optimized Poisson multi-Bernoulli (PMB) filter while incorporating several key innovative designs within the TBD framework. Specifically, we propose a measurement-driven hybrid adaptive birth model for improved track initialization, employ adaptive detection probability parameters to effectively maintain tracks for occluded objects, and optimize density pruning and track extraction modules to further enhance overall tracking performance. Extensive evaluations on nuScenes and KITTI datasets show that OptiPMB achieves superior tracking accuracy compared with state-of-the-art methods, thereby establishing a new benchmark for model-based 3D MOT and offering valuable insights for future research on RFS-based trackers in autonomous driving.
Cognitive Disentanglement for Referring Multi-Object Tracking
Mar 14, 2025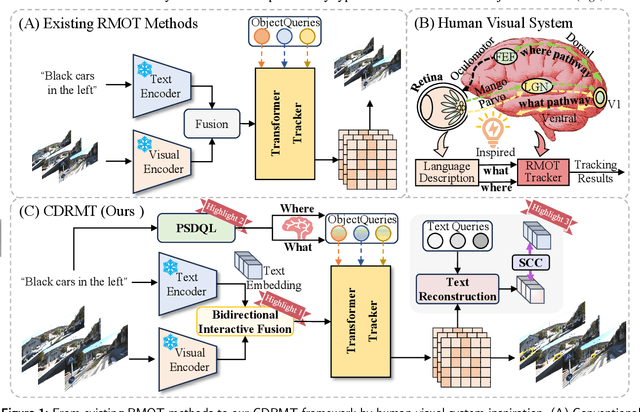
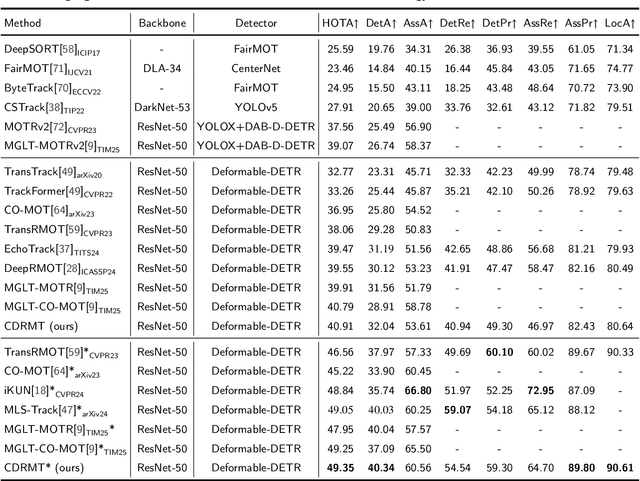
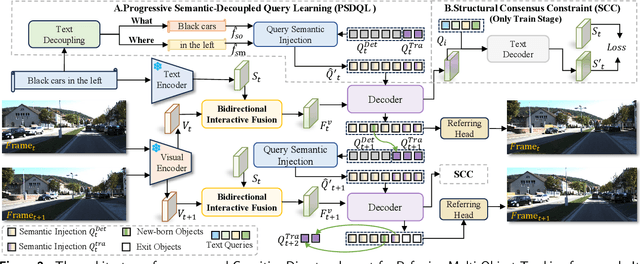
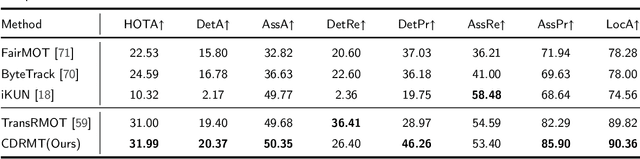
As a significant application of multi-source information fusion in intelligent transportation perception systems, Referring Multi-Object Tracking (RMOT) involves localizing and tracking specific objects in video sequences based on language references. However, existing RMOT approaches often treat language descriptions as holistic embeddings and struggle to effectively integrate the rich semantic information contained in language expressions with visual features. This limitation is especially apparent in complex scenes requiring comprehensive understanding of both static object attributes and spatial motion information. In this paper, we propose a Cognitive Disentanglement for Referring Multi-Object Tracking (CDRMT) framework that addresses these challenges. It adapts the "what" and "where" pathways from human visual processing system to RMOT tasks. Specifically, our framework comprises three collaborative components: (1)The Bidirectional Interactive Fusion module first establishes cross-modal connections while preserving modality-specific characteristics; (2) Building upon this foundation, the Progressive Semantic-Decoupled Query Learning mechanism hierarchically injects complementary information into object queries, progressively refining object understanding from coarse to fine-grained semantic levels; (3) Finally, the Structural Consensus Constraint enforces bidirectional semantic consistency between visual features and language descriptions, ensuring that tracked objects faithfully reflect the referring expression. Extensive experiments on different benchmark datasets demonstrate that CDRMT achieves substantial improvements over state-of-the-art methods, with average gains of 6.0% in HOTA score on Refer-KITTI and 3.2% on Refer-KITTI-V2. Our approach advances the state-of-the-art in RMOT while simultaneously providing new insights into multi-source information fusion.
Machine learning for modelling unstructured grid data in computational physics: a review
Feb 13, 2025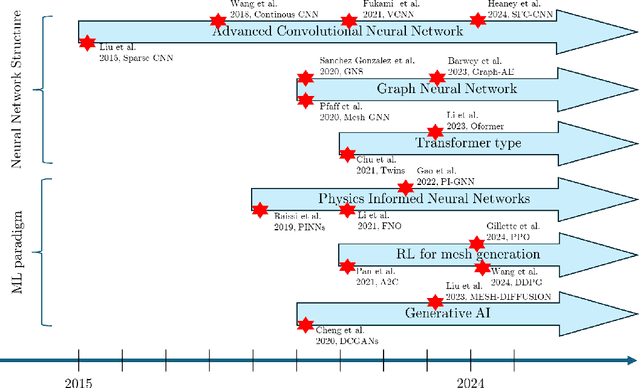
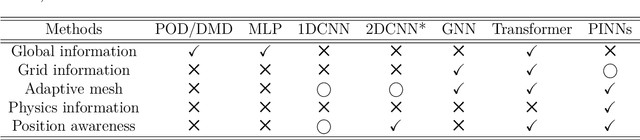
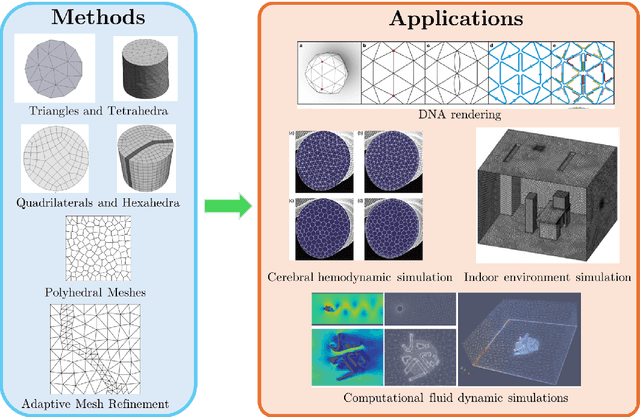
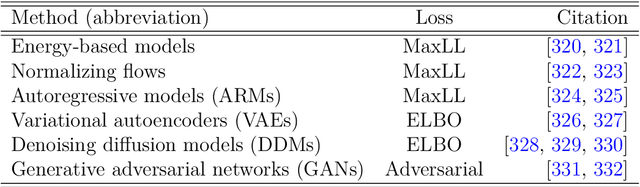
Unstructured grid data are essential for modelling complex geometries and dynamics in computational physics. Yet, their inherent irregularity presents significant challenges for conventional machine learning (ML) techniques. This paper provides a comprehensive review of advanced ML methodologies designed to handle unstructured grid data in high-dimensional dynamical systems. Key approaches discussed include graph neural networks, transformer models with spatial attention mechanisms, interpolation-integrated ML methods, and meshless techniques such as physics-informed neural networks. These methodologies have proven effective across diverse fields, including fluid dynamics and environmental simulations. This review is intended as a guidebook for computational scientists seeking to apply ML approaches to unstructured grid data in their domains, as well as for ML researchers looking to address challenges in computational physics. It places special focus on how ML methods can overcome the inherent limitations of traditional numerical techniques and, conversely, how insights from computational physics can inform ML development. To support benchmarking, this review also provides a summary of open-access datasets of unstructured grid data in computational physics. Finally, emerging directions such as generative models with unstructured data, reinforcement learning for mesh generation, and hybrid physics-data-driven paradigms are discussed to inspire future advancements in this evolving field.