 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePMCE: Probabilistic Multi-Granularity Semantics with Caption-Guided Enhancement for Few-Shot Learning
Jan 20, 2026Few-shot learning aims to identify novel categories from only a handful of labeled samples, where prototypes estimated from scarce data are often biased and generalize poorly. Semantic-based methods alleviate this by introducing coarse class-level information, but they are mostly applied on the support side, leaving query representations unchanged. In this paper, we present PMCE, a Probabilistic few-shot framework that leverages Multi-granularity semantics with Caption-guided Enhancement. PMCE constructs a nonparametric knowledge bank that stores visual statistics for each category as well as CLIP-encoded class name embeddings of the base classes. At meta-test time, the most relevant base classes are retrieved based on the similarities of class name embeddings for each novel category. These statistics are then aggregated into category-specific prior information and fused with the support set prototypes via a simple MAP update. Simultaneously, a frozen BLIP captioner provides label-free instance-level image descriptions, and a lightweight enhancer trained on base classes optimizes both support prototypes and query features under an inductive protocol with a consistency regularization to stabilize noisy captions. Experiments on four benchmarks show that PMCE consistently improves over strong baselines, achieving up to 7.71% absolute gain over the strongest semantic competitor on MiniImageNet in the 1-shot setting. Our code is available at https://anonymous.4open.science/r/PMCE-275D
A Lightweight 3D Anomaly Detection Method with Rotationally Invariant Features
Nov 17, 20253D anomaly detection (AD) is a crucial task in computer vision, aiming to identify anomalous points or regions from point cloud data. However, existing methods may encounter challenges when handling point clouds with changes in orientation and position because the resulting features may vary significantly. To address this problem, we propose a novel Rotationally Invariant Features (RIF) framework for 3D AD. Firstly, to remove the adverse effect of variations on point cloud data, we develop a Point Coordinate Mapping (PCM) technique, which maps each point into a rotationally invariant space to maintain consistency of representation. Then, to learn robust and discriminative features, we design a lightweight Convolutional Transform Feature Network (CTF-Net) to extract rotationally invariant features for the memory bank. To improve the ability of the feature extractor, we introduce the idea of transfer learning to pre-train the feature extractor with 3D data augmentation. Experimental results show that the proposed method achieves the advanced performance on the Anomaly-ShapeNet dataset, with an average P-AUROC improvement of 17.7\%, and also gains the best performance on the Real3D-AD dataset, with an average P-AUROC improvement of 1.6\%. The strong generalization ability of RIF has been verified by combining it with traditional feature extraction methods on anomaly detection tasks, demonstrating great potential for industrial applications.
Mentor3AD: Feature Reconstruction-based 3D Anomaly Detection via Multi-modality Mentor Learning
May 27, 2025Multimodal feature reconstruction is a promising approach for 3D anomaly detection, leveraging the complementary information from dual modalities. We further advance this paradigm by utilizing multi-modal mentor learning, which fuses intermediate features to further distinguish normal from feature differences. To address these challenges, we propose a novel method called Mentor3AD, which utilizes multi-modal mentor learning. By leveraging the shared features of different modalities, Mentor3AD can extract more effective features and guide feature reconstruction, ultimately improving detection performance. Specifically, Mentor3AD includes a Mentor of Fusion Module (MFM) that merges features extracted from RGB and 3D modalities to create a mentor feature. Additionally, we have designed a Mentor of Guidance Module (MGM) to facilitate cross-modal reconstruction, supported by the mentor feature. Lastly, we introduce a Voting Module (VM) to more accurately generate the final anomaly score. Extensive comparative and ablation studies on MVTec 3D-AD and Eyecandies have verified the effectiveness of the proposed method.
Examining the Source of Defects from a Mechanical Perspective for 3D Anomaly Detection
May 09, 2025In this paper, we go beyond identifying anomalies only in structural terms and think about better anomaly detection motivated by anomaly causes. Most anomalies are regarded as the result of unpredictable defective forces from internal and external sources, and their opposite forces are sought to correct the anomalies. We introduced a Mechanics Complementary framework for 3D anomaly detection (MC4AD) to generate internal and external Corrective forces for each point. A Diverse Anomaly-Generation (DA-Gen) module is first proposed to simulate various anomalies. Then, we present a Corrective Force Prediction Network (CFP-Net) with complementary representations for point-level representation to simulate the different contributions of internal and external corrective forces. A combined loss was proposed, including a new symmetric loss and an overall loss, to constrain the corrective forces properly. As a highlight, we consider 3D anomaly detection in industry more comprehensively, creating a hierarchical quality control strategy based on a three-way decision and contributing a dataset named Anomaly-IntraVariance with intraclass variance to evaluate the model. On the proposed and existing five datasets, we obtained nine state-of-the-art performers with the minimum parameters and the fastest inference speed. The source is available at https://github.com/hzzzzzhappy/MC4AD
MC3D-AD: A Unified Geometry-aware Reconstruction Model for Multi-category 3D Anomaly Detection
May 04, 2025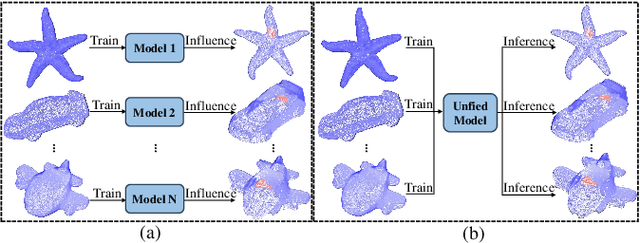
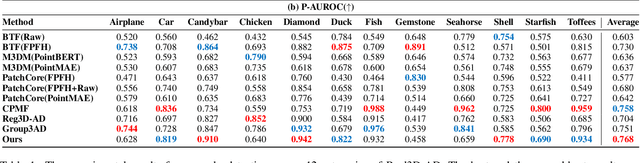
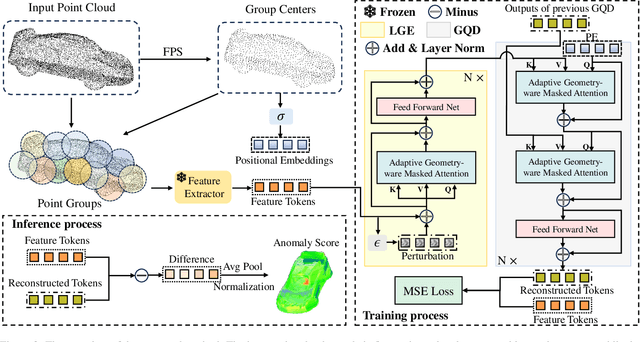
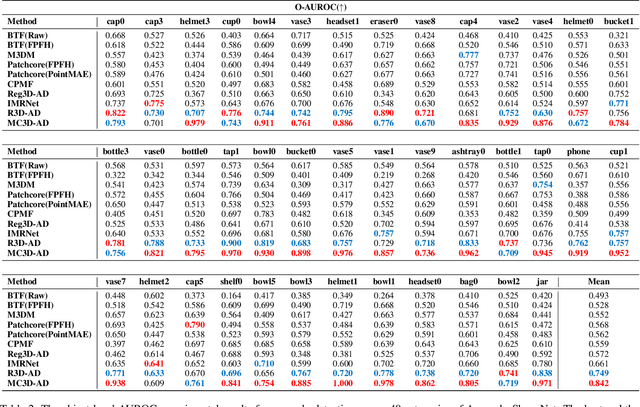
3D Anomaly Detection (AD) is a promising means of controlling the quality of manufactured products. However, existing methods typically require carefully training a task-specific model for each category independently, leading to high cost, low efficiency, and weak generalization. Therefore, this paper presents a novel unified model for Multi-Category 3D Anomaly Detection (MC3D-AD) that aims to utilize both local and global geometry-aware information to reconstruct normal representations of all categories. First, to learn robust and generalized features of different categories, we propose an adaptive geometry-aware masked attention module that extracts geometry variation information to guide mask attention. Then, we introduce a local geometry-aware encoder reinforced by the improved mask attention to encode group-level feature tokens. Finally, we design a global query decoder that utilizes point cloud position embeddings to improve the decoding process and reconstruction ability. This leads to local and global geometry-aware reconstructed feature tokens for the AD task. MC3D-AD is evaluated on two publicly available Real3D-AD and Anomaly-ShapeNet datasets, and exhibits significant superiority over current state-of-the-art single-category methods, achieving 3.1\% and 9.3\% improvement in object-level AUROC over Real3D-AD and Anomaly-ShapeNet, respectively. The source code will be released upon acceptance.
Fence Theorem: Towards Dual-Objective Semantic-Structure Isolation in Preprocessing Phase for 3D Anomaly Detection
Mar 04, 2025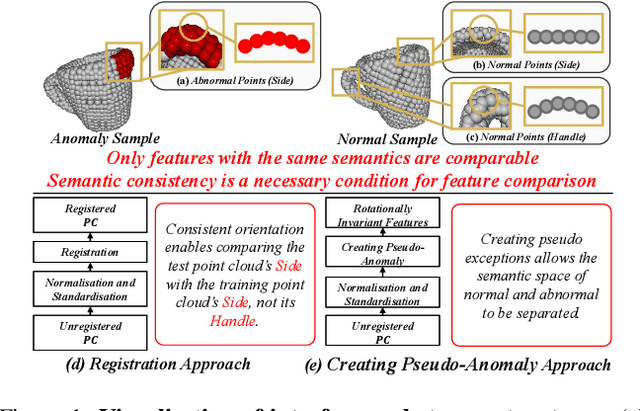
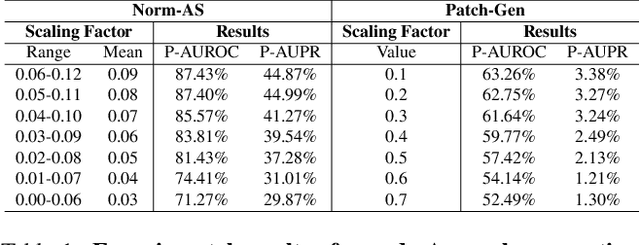
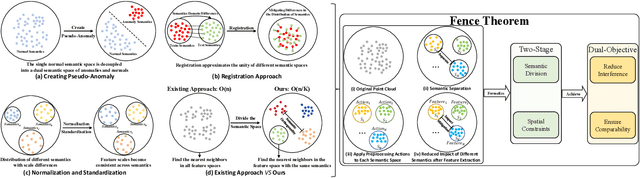

3D anomaly detection (AD) is prominent but difficult due to lacking a unified theoretical foundation for preprocessing design. We establish the Fence Theorem, formalizing preprocessing as a dual-objective semantic isolator: (1) mitigating cross-semantic interference to the greatest extent feasible and (2) confining anomaly judgments to aligned semantic spaces wherever viable, thereby establishing intra-semantic comparability. Any preprocessing approach achieves this goal through a two-stage process of Emantic-Division and Spatial-Constraints stage. Through systematic deconstruction, we theoretically and experimentally subsume existing preprocessing methods under this theorem via tripartite evidence: qualitative analyses, quantitative studies, and mathematical proofs. Guided by the Fence Theorem, we implement Patch3D, consisting of Patch-Cutting and Patch-Matching modules, to segment semantic spaces and consolidate similar ones while independently modeling normal features within each space. Experiments on Anomaly-ShapeNet and Real3D-AD with different settings demonstrate that progressively finer-grained semantic alignment in preprocessing directly enhances point-level AD accuracy, providing inverse validation of the theorem's causal logic.
Learning with Open-world Noisy Data via Class-independent Margin in Dual Representation Space
Jan 19, 2025



Learning with Noisy Labels (LNL) aims to improve the model generalization when facing data with noisy labels, and existing methods generally assume that noisy labels come from known classes, called closed-set noise. However, in real-world scenarios, noisy labels from similar unknown classes, i.e., open-set noise, may occur during the training and inference stage. Such open-world noisy labels may significantly impact the performance of LNL methods. In this study, we propose a novel dual-space joint learning method to robustly handle the open-world noise. To mitigate model overfitting on closed-set and open-set noises, a dual representation space is constructed by two networks. One is a projection network that learns shared representations in the prototype space, while the other is a One-Vs-All (OVA) network that makes predictions using unique semantic representations in the class-independent space. Then, bi-level contrastive learning and consistency regularization are introduced in two spaces to enhance the detection capability for data with unknown classes. To benefit from the memorization effects across different types of samples, class-independent margin criteria are designed for sample identification, which selects clean samples, weights closed-set noise, and filters open-set noise effectively. Extensive experiments demonstrate that our method outperforms the state-of-the-art methods and achieves an average accuracy improvement of 4.55\% and an AUROC improvement of 6.17\% on CIFAR80N.
Fuzzy Granule Density-Based Outlier Detection with Multi-Scale Granular Balls
Jan 06, 2025



Outlier detection refers to the identification of anomalous samples that deviate significantly from the distribution of normal data and has been extensively studied and used in a variety of practical tasks. However, most unsupervised outlier detection methods are carefully designed to detect specified outliers, while real-world data may be entangled with different types of outliers. In this study, we propose a fuzzy rough sets-based multi-scale outlier detection method to identify various types of outliers. Specifically, a novel fuzzy rough sets-based method that integrates relative fuzzy granule density is first introduced to improve the capability of detecting local outliers. Then, a multi-scale view generation method based on granular-ball computing is proposed to collaboratively identify group outliers at different levels of granularity. Moreover, reliable outliers and inliers determined by the three-way decision are used to train a weighted support vector machine to further improve the performance of outlier detection. The proposed method innovatively transforms unsupervised outlier detection into a semi-supervised classification problem and for the first time explores the fuzzy rough sets-based outlier detection from the perspective of multi-scale granular balls, allowing for high adaptability to different types of outliers. Extensive experiments carried out on both artificial and UCI datasets demonstrate that the proposed outlier detection method significantly outperforms the state-of-the-art methods, improving the results by at least 8.48% in terms of the Area Under the ROC Curve (AUROC) index. { The source codes are released at \url{https://github.com/Xiaofeng-Tan/MGBOD}. }
FlameGS: Reconstruct flame light field via Gaussian Splatting
Dec 24, 2024



To address the time-consuming and computationally intensive issues of traditional ART algorithms for flame combustion diagnosis, inspired by flame simulation technology, we propose a novel representation method for flames. By modeling the luminous process of flames and utilizing 2D projection images for supervision, our experimental validation shows that this model achieves an average structural similarity index of 0.96 between actual images and predicted 2D projections, along with a Peak Signal-to-Noise Ratio of 39.05. Additionally, it saves approximately 34 times the computation time and about 10 times the memory compared to traditional algorithms.
Look Inside for More: Internal Spatial Modality Perception for 3D Anomaly Detection
Dec 18, 2024



3D anomaly detection has recently become a significant focus in computer vision. Several advanced methods have achieved satisfying anomaly detection performance. However, they typically concentrate on the external structure of 3D samples and struggle to leverage the internal information embedded within samples. Inspired by the basic intuition of why not look inside for more, we introduce a straightforward method named Internal Spatial Modality Perception (ISMP) to explore the feature representation from internal views fully. Specifically, our proposed ISMP consists of a critical perception module, Spatial Insight Engine (SIE), which abstracts complex internal information of point clouds into essential global features. Besides, to better align structural information with point data, we propose an enhanced key point feature extraction module for amplifying spatial structure feature representation. Simultaneously, a novel feature filtering module is incorporated to reduce noise and redundant features for further aligning precise spatial structure. Extensive experiments validate the effectiveness of our proposed method, achieving object-level and pixel-level AUROC improvements of 4.2% and 13.1%, respectively, on the Real3D-AD benchmarks. Note that the strong generalization ability of SIE has been theoretically proven and is verified in both classification and segmentation tasks.