 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards High-resolution 3D Anomaly Detection via Group-Level Feature Contrastive Learning
Paper and Code

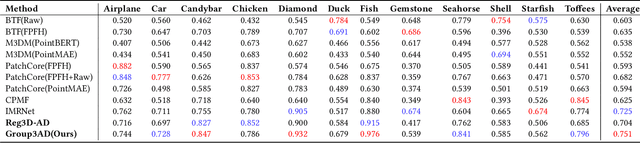
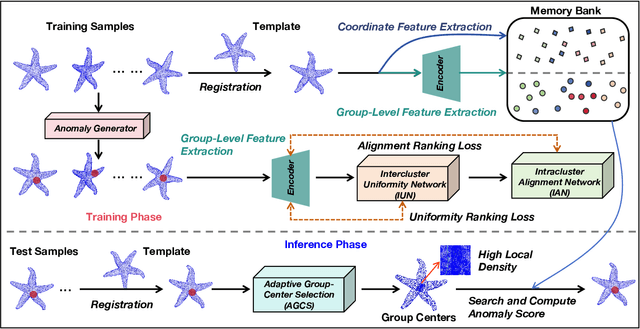

High-resolution point clouds~(HRPCD) anomaly detection~(AD) plays a critical role in precision machining and high-end equipment manufacturing. Despite considerable 3D-AD methods that have been proposed recently, they still cannot meet the requirements of the HRPCD-AD task. There are several challenges: i) It is difficult to directly capture HRPCD information due to large amounts of points at the sample level; ii) The advanced transformer-based methods usually obtain anisotropic features, leading to degradation of the representation; iii) The proportion of abnormal areas is very small, which makes it difficult to characterize. To address these challenges, we propose a novel group-level feature-based network, called Group3AD, which has a significantly efficient representation ability. First, we design an Intercluster Uniformity Network~(IUN) to present the mapping of different groups in the feature space as several clusters, and obtain a more uniform distribution between clusters representing different parts of the point clouds in the feature space. Then, an Intracluster Alignment Network~(IAN) is designed to encourage groups within the cluster to be distributed tightly in the feature space. In addition, we propose an Adaptive Group-Center Selection~(AGCS) based on geometric information to improve the pixel density of potential anomalous regions during inference. The experimental results verify the effectiveness of our proposed Group3AD, which surpasses Reg3D-AD by the margin of 5\% in terms of object-level AUROC on Real3D-AD. We provide the code and supplementary information on our website: https://github.com/M-3LAB/Group3AD.