 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCognitive Disentanglement for Referring Multi-Object Tracking
Mar 14, 2025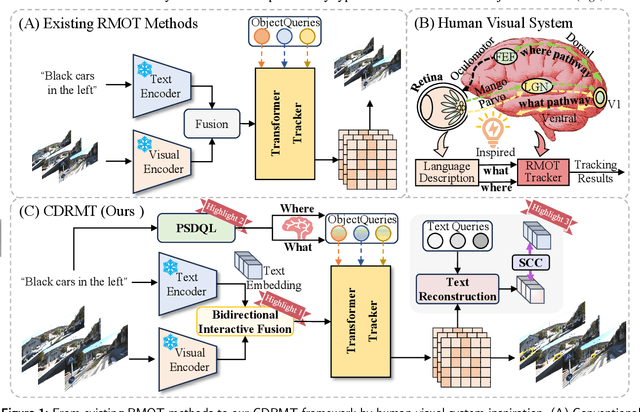
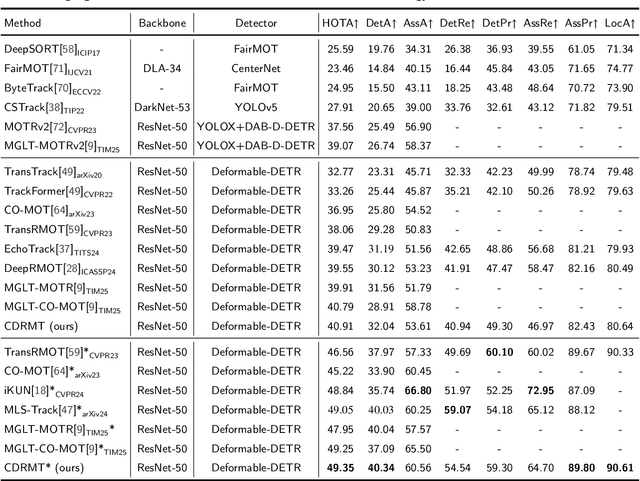
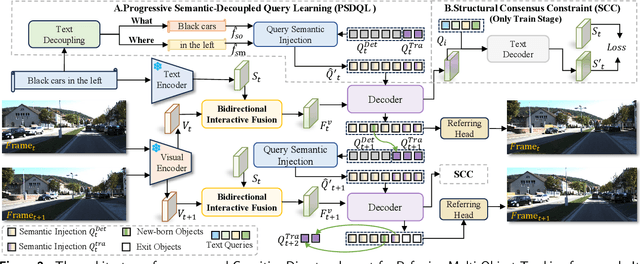
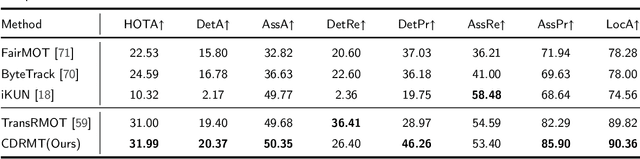
As a significant application of multi-source information fusion in intelligent transportation perception systems, Referring Multi-Object Tracking (RMOT) involves localizing and tracking specific objects in video sequences based on language references. However, existing RMOT approaches often treat language descriptions as holistic embeddings and struggle to effectively integrate the rich semantic information contained in language expressions with visual features. This limitation is especially apparent in complex scenes requiring comprehensive understanding of both static object attributes and spatial motion information. In this paper, we propose a Cognitive Disentanglement for Referring Multi-Object Tracking (CDRMT) framework that addresses these challenges. It adapts the "what" and "where" pathways from human visual processing system to RMOT tasks. Specifically, our framework comprises three collaborative components: (1)The Bidirectional Interactive Fusion module first establishes cross-modal connections while preserving modality-specific characteristics; (2) Building upon this foundation, the Progressive Semantic-Decoupled Query Learning mechanism hierarchically injects complementary information into object queries, progressively refining object understanding from coarse to fine-grained semantic levels; (3) Finally, the Structural Consensus Constraint enforces bidirectional semantic consistency between visual features and language descriptions, ensuring that tracked objects faithfully reflect the referring expression. Extensive experiments on different benchmark datasets demonstrate that CDRMT achieves substantial improvements over state-of-the-art methods, with average gains of 6.0% in HOTA score on Refer-KITTI and 3.2% on Refer-KITTI-V2. Our approach advances the state-of-the-art in RMOT while simultaneously providing new insights into multi-source information fusion.