 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultipath Extended Target Tracking with Labeled Random Finite Sets
Feb 03, 2026High-resolution radar sensors are critical for autonomous systems but pose significant challenges to traditional tracking algorithms due to the generation of multiple measurements per object and the presence of multipath effects. Existing solutions often rely on the point target assumption or treat multipath measurements as clutter, whereas current extended target trackers often lack the capability to maintain trajectory continuity in complex multipath environments. To address these limitations, this paper proposes the multipath extended target generalized labeled multi-Bernoulli (MPET-GLMB) filter. A unified Bayesian framework based on labeled random finite set theory is derived to jointly model target existence, measurement partitioning, and the association between measurements, targets, and propagation paths. This formulation enables simultaneous trajectory estimation for both targets and reflectors without requiring heuristic post-processing. To enhance computational efficiency, a joint prediction and update implementation based on Gibbs sampling is developed. Furthermore, a measurement-driven adaptive birth model is introduced to initialize tracks without prior knowledge of target positions. Experimental results from simulated scenarios and real-world automotive radar data demonstrate that the proposed filter outperforms state-of-the-art methods, achieving superior state estimation accuracy and robust trajectory maintenance in dynamic multipath environments.
OptiPMB: Enhancing 3D Multi-Object Tracking with Optimized Poisson Multi-Bernoulli Filtering
Mar 17, 2025Accurate 3D multi-object tracking (MOT) is crucial for autonomous driving, as it enables robust perception, navigation, and planning in complex environments. While deep learning-based solutions have demonstrated impressive 3D MOT performance, model-based approaches remain appealing for their simplicity, interpretability, and data efficiency. Conventional model-based trackers typically rely on random vector-based Bayesian filters within the tracking-by-detection (TBD) framework but face limitations due to heuristic data association and track management schemes. In contrast, random finite set (RFS)-based Bayesian filtering handles object birth, survival, and death in a theoretically sound manner, facilitating interpretability and parameter tuning. In this paper, we present OptiPMB, a novel RFS-based 3D MOT method that employs an optimized Poisson multi-Bernoulli (PMB) filter while incorporating several key innovative designs within the TBD framework. Specifically, we propose a measurement-driven hybrid adaptive birth model for improved track initialization, employ adaptive detection probability parameters to effectively maintain tracks for occluded objects, and optimize density pruning and track extraction modules to further enhance overall tracking performance. Extensive evaluations on nuScenes and KITTI datasets show that OptiPMB achieves superior tracking accuracy compared with state-of-the-art methods, thereby establishing a new benchmark for model-based 3D MOT and offering valuable insights for future research on RFS-based trackers in autonomous driving.
ProbRadarM3F: mmWave Radar based Human Skeletal Pose Estimation with Probability Map Guided Multi-Format Feature Fusion
May 08, 2024



Millimetre wave (mmWave) radar is a non-intrusive privacy and relatively convenient and inexpensive device, which has been demonstrated to be applicable in place of RGB cameras in human indoor pose estimation tasks. However, mmWave radar relies on the collection of reflected signals from the target, and the radar signals containing information is difficult to be fully applied. This has been a long-standing hindrance to the improvement of pose estimation accuracy. To address this major challenge, this paper introduces a probability map guided multi-format feature fusion model, ProbRadarM3F. This is a novel radar feature extraction framework using a traditional FFT method in parallel with a probability map based positional encoding method. ProbRadarM3F fuses the traditional heatmap features and the positional features, then effectively achieves the estimation of 14 keypoints of the human body. Experimental evaluation on the HuPR dataset proves the effectiveness of the model proposed in this paper, outperforming other methods experimented on this dataset with an AP of 69.9 %. The emphasis of our study is focusing on the position information that is not exploited before in radar singal. This provides direction to investigate other potential non-redundant information from mmWave rader.
Separate, Dynamic and Differentiable (SMART) Pruner for Block/Output Channel Pruning on Computer Vision Tasks
Mar 29, 2024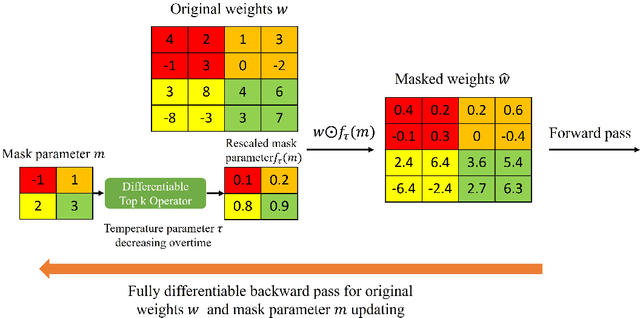
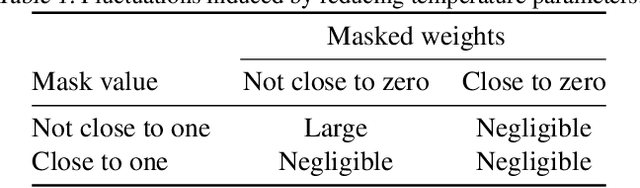

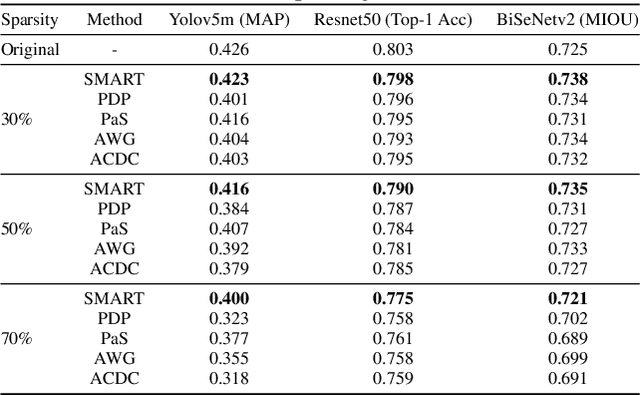
Deep Neural Network (DNN) pruning has emerged as a key strategy to reduce model size, improve inference latency, and lower power consumption on DNN accelerators. Among various pruning techniques, block and output channel pruning have shown significant potential in accelerating hardware performance. However, their accuracy often requires further improvement. In response to this challenge, we introduce a separate, dynamic and differentiable (SMART) pruner. This pruner stands out by utilizing a separate, learnable probability mask for weight importance ranking, employing a differentiable Top k operator to achieve target sparsity, and leveraging a dynamic temperature parameter trick to escape from non-sparse local minima. In our experiments, the SMART pruner consistently demonstrated its superiority over existing pruning methods across a wide range of tasks and models on block and output channel pruning. Additionally, we extend our testing to Transformer-based models in N:M pruning scenarios, where SMART pruner also yields state-of-the-art results, demonstrating its adaptability and robustness across various neural network architectures, and pruning types.
LiDAR Point Cloud-based Multiple Vehicle Tracking with Probabilistic Measurement-Region Association
Mar 12, 2024



Multiple extended target tracking (ETT) has gained increasing attention due to the development of high-precision LiDAR and radar sensors in automotive applications. For LiDAR point cloud-based vehicle tracking, this paper presents a probabilistic measurement-region association (PMRA) ETT model, which can describe the complex measurement distribution by partitioning the target extent into different regions. The PMRA model overcomes the drawbacks of previous data-region association (DRA) models by eliminating the approximation error of constrained estimation and using continuous integrals to more reliably calculate the association probabilities. Furthermore, the PMRA model is integrated with the Poisson multi-Bernoulli mixture (PMBM) filter for tracking multiple vehicles. Simulation results illustrate the superior estimation accuracy of the proposed PMRA-PMBM filter in terms of both positions and extents of the vehicles comparing with PMBM filters using the gamma Gaussian inverse Wishart and DRA implementations.
Which Framework is Suitable for Online 3D Multi-Object Tracking for Autonomous Driving with Automotive 4D Imaging Radar?
Sep 13, 2023



Online 3D multi-object tracking (MOT) has recently received significant research interests due to the expanding demand of 3D perception in advanced driver assistance systems (ADAS) and autonomous driving (AD). Among the existing 3D MOT frameworks for ADAS and AD, conventional point object tracking (POT) framework using the tracking-by-detection (TBD) strategy has been well studied and accepted for LiDAR and 4D imaging radar point clouds. In contrast, extended object tracking (EOT), another important framework which accepts the joint-detection-and-tracking (JDT) strategy, has rarely been explored for online 3D MOT applications. This paper provides the first systematical investigation of the EOT framework for online 3D MOT in real-world ADAS and AD scenarios. Specifically, the widely accepted TBD-POT framework, the recently investigated JDT-EOT framework, and our proposed TBD-EOT framework are compared via extensive evaluations on two open source 4D imaging radar datasets: View-of-Delft and TJ4DRadSet. Experiment results demonstrate that the conventional TBD-POT framework remains preferable for online 3D MOT with high tracking performance and low computational complexity, while the proposed TBD-EOT framework has the potential to outperform it in certain situations. However, the results also show that the JDT-EOT framework encounters multiple problems and performs inadequately in evaluation scenarios. After analyzing the causes of these phenomena based on various evaluation metrics and visualizations, we provide possible guidelines to improve the performance of these MOT frameworks on real-world data. These provide the first benchmark and important insights for the future development of 4D imaging radar-based online 3D MOT.