 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaster Rules from Chaos: Learning to Reason, Plan, and Interact from Chaos for Tangram Assembly
May 17, 2025Tangram assembly, the art of human intelligence and manipulation dexterity, is a new challenge for robotics and reveals the limitations of state-of-the-arts. Here, we describe our initial exploration and highlight key problems in reasoning, planning, and manipulation for robotic tangram assembly. We present MRChaos (Master Rules from Chaos), a robust and general solution for learning assembly policies that can generalize to novel objects. In contrast to conventional methods based on prior geometric and kinematic models, MRChaos learns to assemble randomly generated objects through self-exploration in simulation without prior experience in assembling target objects. The reward signal is obtained from the visual observation change without manually designed models or annotations. MRChaos retains its robustness in assembling various novel tangram objects that have never been encountered during training, with only silhouette prompts. We show the potential of MRChaos in wider applications such as cutlery combinations. The presented work indicates that radical generalization in robotic assembly can be achieved by learning in much simpler domains.
Quantitative Hardness Assessment with Vision-based Tactile Sensing for Fruit Classification and Grasping
May 09, 2025Accurate estimation of fruit hardness is essential for automated classification and handling systems, particularly in determining fruit variety, assessing ripeness, and ensuring proper harvesting force. This study presents an innovative framework for quantitative hardness assessment utilizing vision-based tactile sensing, tailored explicitly for robotic applications in agriculture. The proposed methodology derives normal force estimation from a vision-based tactile sensor, and, based on the dynamics of this normal force, calculates the hardness. This approach offers a rapid, non-destructive evaluation through single-contact interaction. The integration of this framework into robotic systems enhances real-time adaptability of grasping forces, thereby reducing the likelihood of fruit damage. Moreover, the general applicability of this approach, through a universal criterion based on average normal force dynamics, ensures its effectiveness across a wide variety of fruit types and sizes. Extensive experimental validation conducted across different fruit types and ripeness-tracking studies demonstrates the efficacy and robustness of the framework, marking a significant advancement in the domain of automated fruit handling.
Spatial-Temporal Graph Diffusion Policy with Kinematic Modeling for Bimanual Robotic Manipulation
Mar 13, 2025



Despite the significant success of imitation learning in robotic manipulation, its application to bimanual tasks remains highly challenging. Existing approaches mainly learn a policy to predict a distant next-best end-effector pose (NBP) and then compute the corresponding joint rotation angles for motion using inverse kinematics. However, they suffer from two important issues: (1) rarely considering the physical robotic structure, which may cause self-collisions or interferences, and (2) overlooking the kinematics constraint, which may result in the predicted poses not conforming to the actual limitations of the robot joints. In this paper, we propose Kinematics enhanced Spatial-TemporAl gRaph Diffuser (KStar Diffuser). Specifically, (1) to incorporate the physical robot structure information into action prediction, KStar Diffuser maintains a dynamic spatial-temporal graph according to the physical bimanual joint motions at continuous timesteps. This dynamic graph serves as the robot-structure condition for denoising the actions; (2) to make the NBP learning objective consistent with kinematics, we introduce the differentiable kinematics to provide the reference for optimizing KStar Diffuser. This module regularizes the policy to predict more reliable and kinematics-aware next end-effector poses. Experimental results show that our method effectively leverages the physical structural information and generates kinematics-aware actions in both simulation and real-world
Generative Artificial Intelligence in Robotic Manipulation: A Survey
Mar 05, 2025

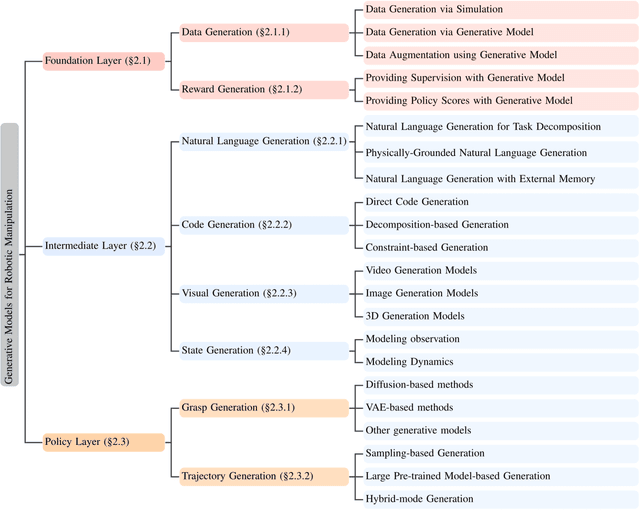

This survey provides a comprehensive review on recent advancements of generative learning models in robotic manipulation, addressing key challenges in the field. Robotic manipulation faces critical bottlenecks, including significant challenges in insufficient data and inefficient data acquisition, long-horizon and complex task planning, and the multi-modality reasoning ability for robust policy learning performance across diverse environments. To tackle these challenges, this survey introduces several generative model paradigms, including Generative Adversarial Networks (GANs), Variational Autoencoders (VAEs), diffusion models, probabilistic flow models, and autoregressive models, highlighting their strengths and limitations. The applications of these models are categorized into three hierarchical layers: the Foundation Layer, focusing on data generation and reward generation; the Intermediate Layer, covering language, code, visual, and state generation; and the Policy Layer, emphasizing grasp generation and trajectory generation. Each layer is explored in detail, along with notable works that have advanced the state of the art. Finally, the survey outlines future research directions and challenges, emphasizing the need for improved efficiency in data utilization, better handling of long-horizon tasks, and enhanced generalization across diverse robotic scenarios. All the related resources, including research papers, open-source data, and projects, are collected for the community in https://github.com/GAI4Manipulation/AwesomeGAIManipulation
Occlusion-Aware Contingency Safety-Critical Planning for Autonomous Vehicles
Feb 10, 2025



Ensuring safe driving while maintaining travel efficiency for autonomous vehicles in dynamic and occluded environments is a critical challenge. This paper proposes an occlusion-aware contingency safety-critical planning approach for real-time autonomous driving in such environments. Leveraging reachability analysis for risk assessment, forward reachable sets of occluded phantom vehicles are computed to quantify dynamic velocity boundaries. These velocity boundaries are incorporated into a biconvex nonlinear programming (NLP) formulation, enabling simultaneous optimization of exploration and fallback trajectories within a receding horizon planning framework. To facilitate real-time optimization and ensure coordination between trajectories, we employ the consensus alternating direction method of multipliers (ADMM) to decompose the biconvex NLP problem into low-dimensional convex subproblems. The effectiveness of the proposed approach is validated through simulation studies and real-world experiments in occluded intersections. Experimental results demonstrate enhanced safety and improved travel efficiency, enabling real-time safe trajectory generation in dynamic occluded intersections under varying obstacle conditions. A video showcasing the experimental results is available at https://youtu.be/CHayG7NChqM.
FRTree Planner: Robot Navigation in Cluttered and Unknown Environments with Tree of Free Regions
Oct 26, 2024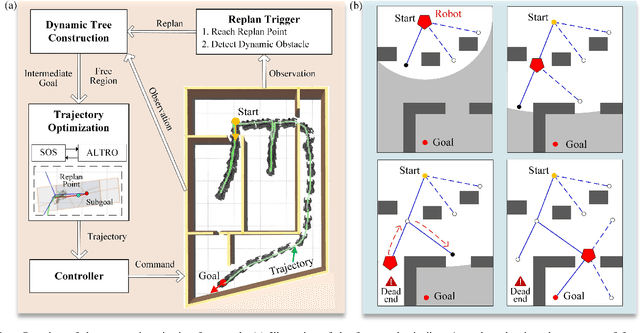

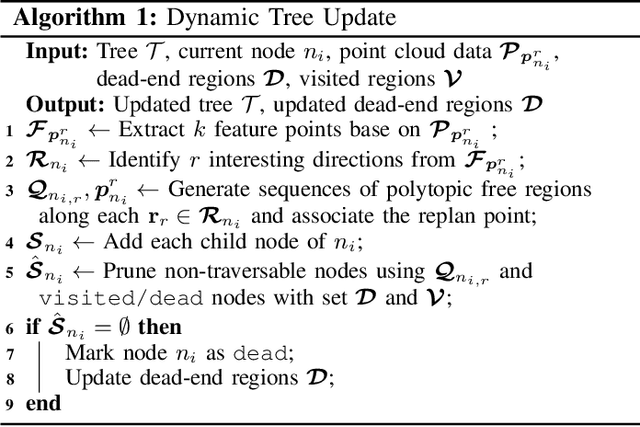
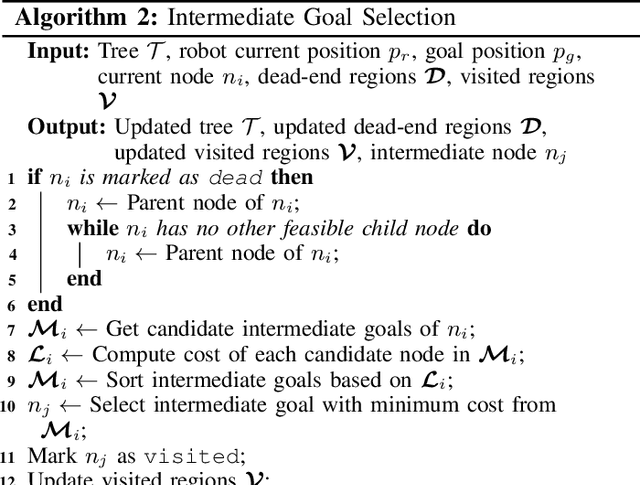
In this work, we present FRTree planner, a novel robot navigation framework that leverages a tree structure of free regions, specifically designed for navigation in cluttered and unknown environments with narrow passages. The framework continuously incorporates real-time perceptive information to identify distinct navigation options and dynamically expands the tree toward explorable and traversable directions. This dynamically constructed tree incrementally encodes the geometric and topological information of the collision-free space, enabling efficient selection of the intermediate goals, navigating around dead-end situations, and avoidance of dynamic obstacles without a prior map. Crucially, our method performs a comprehensive analysis of the geometric relationship between free regions and the robot during online replanning. In particular, the planner assesses the accessibility of candidate passages based on the robot's geometries, facilitating the effective selection of the most viable intermediate goals through accessible narrow passages while minimizing unnecessary detours. By combining the free region information with a bi-level trajectory optimization tailored for robots with specific geometries, our approach generates robust and adaptable obstacle avoidance strategies in confined spaces. Through extensive simulations and real-world experiments, FRTree demonstrates its superiority over benchmark methods in generating safe, efficient motion plans through highly cluttered and unknown terrains with narrow gaps.
Safe and Real-Time Consistent Planning for Autonomous Vehicles in Partially Observed Environments via Parallel Consensus Optimization
Sep 16, 2024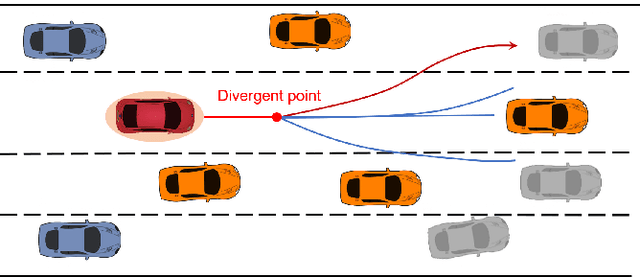
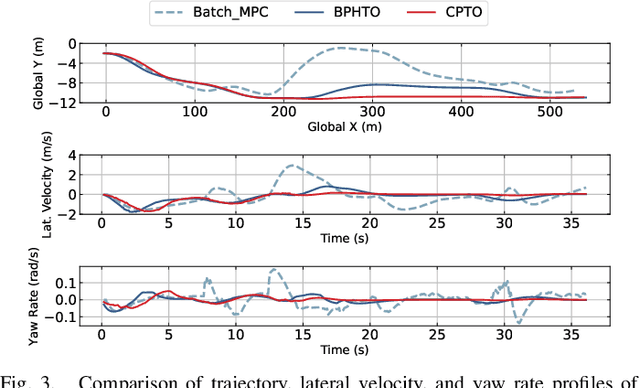
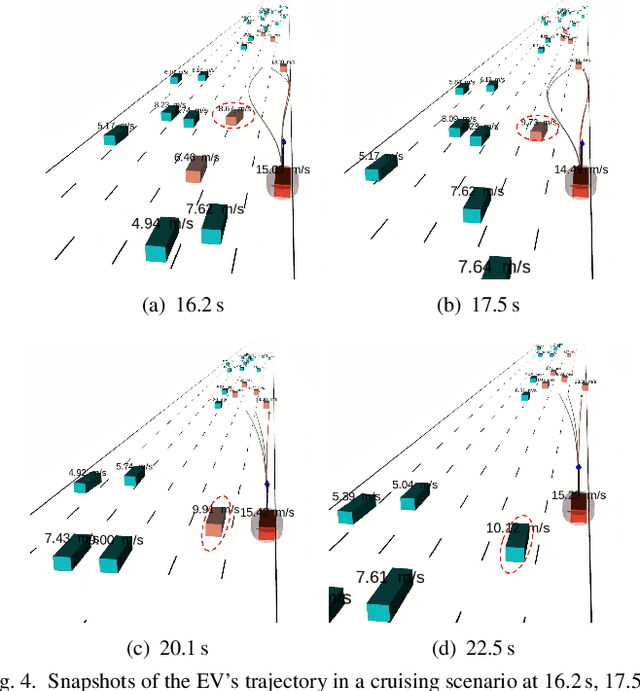
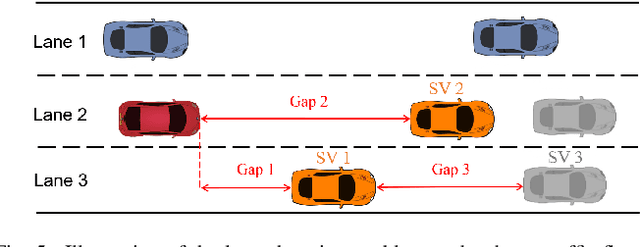
Ensuring safety and driving consistency is a significant challenge for autonomous vehicles operating in partially observed environments. This work introduces a consistent parallel trajectory optimization (CPTO) approach to enable safe and consistent driving in dense obstacle environments with perception uncertainties. Utilizing discrete-time barrier function theory, we develop a consensus safety barrier module that ensures reliable safety coverage within the spatiotemporal trajectory space across potential obstacle configurations. Following this, a bi-convex parallel trajectory optimization problem is derived that facilitates decomposition into a series of low-dimensional quadratic programming problems to accelerate computation. By leveraging the consensus alternating direction method of multipliers (ADMM) for parallel optimization, each generated candidate trajectory corresponds to a possible environment configuration while sharing a common consensus trajectory segment. This ensures driving safety and consistency when executing the consensus trajectory segment for the ego vehicle in real time. We validate our CPTO framework through extensive comparisons with state-of-the-art baselines across multiple driving tasks in partially observable environments. Our results demonstrate improved safety and consistency using both synthetic and real-world traffic datasets.
Distributed Motion Control of Multiple Mobile Manipulator System with Disturbance and Communication Delay
Jun 09, 2024



In real-world object manipulation scenarios, multiple mobile manipulator systems may suffer from disturbances and asynchrony, leading to excessive interaction forces and causing object damage or emergency stops. This paper presents a novel distributed motion control approach aimed at reducing these unnecessary interaction forces. The control strategy only utilizes force information without the need for global position and velocity information. Disturbances are corrected through compensatory movements of the manipulators. Besides, the asymmetric, non-uniform, and time-varying communication delays between robots are also considered. The stability of the control law is rigorously proven by the Lyapunov theorem. Subsequently, the efficacy of the proposed control law is validated through simulations and experiments of collaborative object transportation by two robots. Experimental results demonstrate the effectiveness of the proposed control law in reducing interaction forces during object manipulation.
Decision Mamba: A Multi-Grained State Space Model with Self-Evolution Regularization for Offline RL
Jun 08, 2024
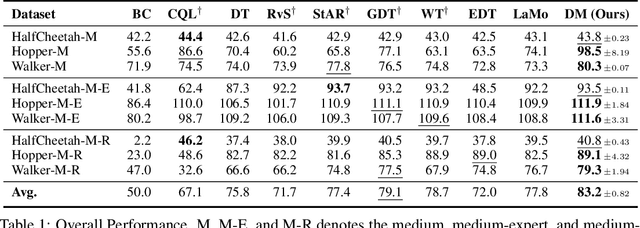
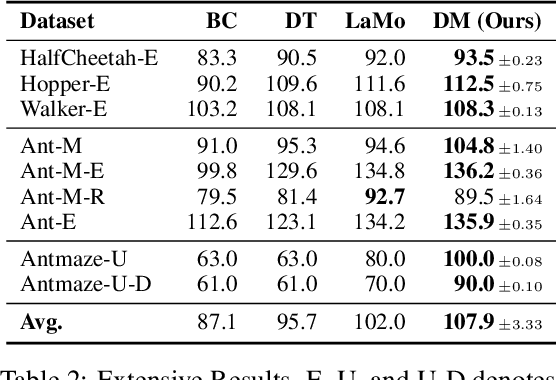

While the conditional sequence modeling with the transformer architecture has demonstrated its effectiveness in dealing with offline reinforcement learning (RL) tasks, it is struggle to handle out-of-distribution states and actions. Existing work attempts to address this issue by data augmentation with the learned policy or adding extra constraints with the value-based RL algorithm. However, these studies still fail to overcome the following challenges: (1) insufficiently utilizing the historical temporal information among inter-steps, (2) overlooking the local intrastep relationships among states, actions and return-to-gos (RTGs), (3) overfitting suboptimal trajectories with noisy labels. To address these challenges, we propose Decision Mamba (DM), a novel multi-grained state space model (SSM) with a self-evolving policy learning strategy. DM explicitly models the historical hidden state to extract the temporal information by using the mamba architecture. To capture the relationship among state-action-RTG triplets, a fine-grained SSM module is designed and integrated into the original coarse-grained SSM in mamba, resulting in a novel mamba architecture tailored for offline RL. Finally, to mitigate the overfitting issue on noisy trajectories, a self-evolving policy is proposed by using progressive regularization. The policy evolves by using its own past knowledge to refine the suboptimal actions, thus enhancing its robustness on noisy demonstrations. Extensive experiments on various tasks show that DM outperforms other baselines substantially.
RoomTex: Texturing Compositional Indoor Scenes via Iterative Inpainting
Jun 04, 2024
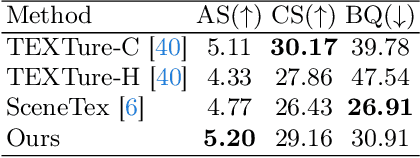
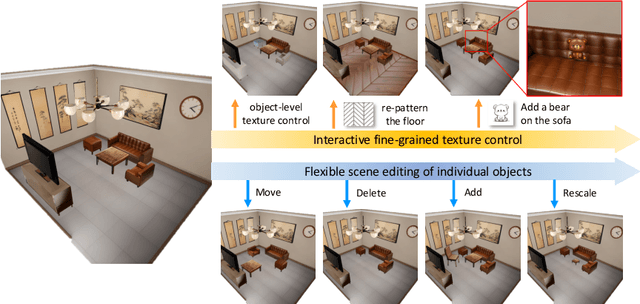
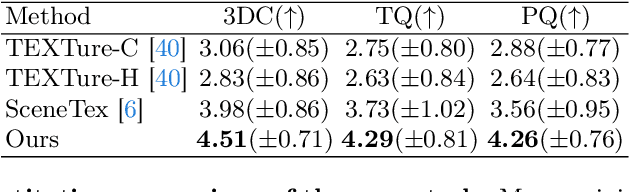
The advancement of diffusion models has pushed the boundary of text-to-3D object generation. While it is straightforward to composite objects into a scene with reasonable geometry, it is nontrivial to texture such a scene perfectly due to style inconsistency and occlusions between objects. To tackle these problems, we propose a coarse-to-fine 3D scene texturing framework, referred to as RoomTex, to generate high-fidelity and style-consistent textures for untextured compositional scene meshes. In the coarse stage, RoomTex first unwraps the scene mesh to a panoramic depth map and leverages ControlNet to generate a room panorama, which is regarded as the coarse reference to ensure the global texture consistency. In the fine stage, based on the panoramic image and perspective depth maps, RoomTex will refine and texture every single object in the room iteratively along a series of selected camera views, until this object is completely painted. Moreover, we propose to maintain superior alignment between RGB and depth spaces via subtle edge detection methods. Extensive experiments show our method is capable of generating high-quality and diverse room textures, and more importantly, supporting interactive fine-grained texture control and flexible scene editing thanks to our inpainting-based framework and compositional mesh input. Our project page is available at https://qwang666.github.io/RoomTex/.