 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantitative Hardness Assessment with Vision-based Tactile Sensing for Fruit Classification and Grasping
May 09, 2025Accurate estimation of fruit hardness is essential for automated classification and handling systems, particularly in determining fruit variety, assessing ripeness, and ensuring proper harvesting force. This study presents an innovative framework for quantitative hardness assessment utilizing vision-based tactile sensing, tailored explicitly for robotic applications in agriculture. The proposed methodology derives normal force estimation from a vision-based tactile sensor, and, based on the dynamics of this normal force, calculates the hardness. This approach offers a rapid, non-destructive evaluation through single-contact interaction. The integration of this framework into robotic systems enhances real-time adaptability of grasping forces, thereby reducing the likelihood of fruit damage. Moreover, the general applicability of this approach, through a universal criterion based on average normal force dynamics, ensures its effectiveness across a wide variety of fruit types and sizes. Extensive experimental validation conducted across different fruit types and ripeness-tracking studies demonstrates the efficacy and robustness of the framework, marking a significant advancement in the domain of automated fruit handling.
DelTact: A Vision-based Tactile Sensor Using Dense Color Pattern
Feb 15, 2022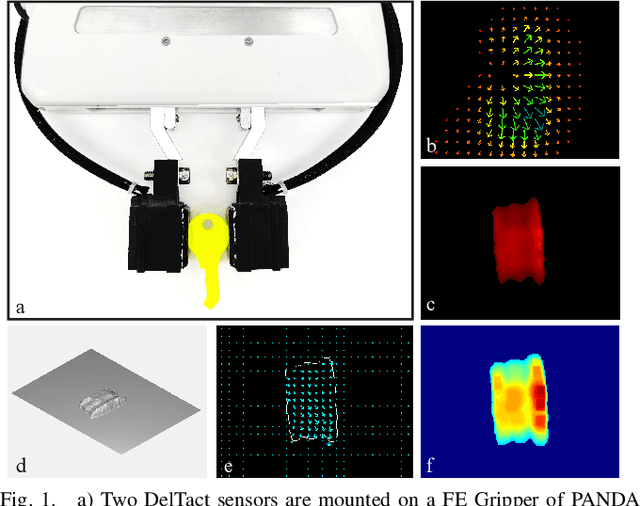
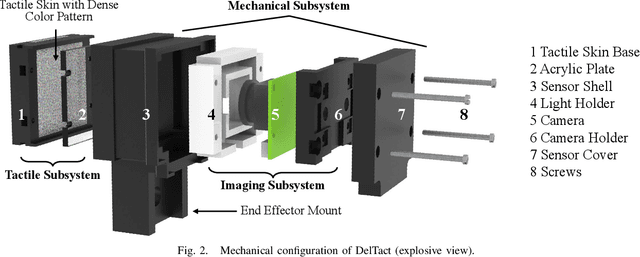
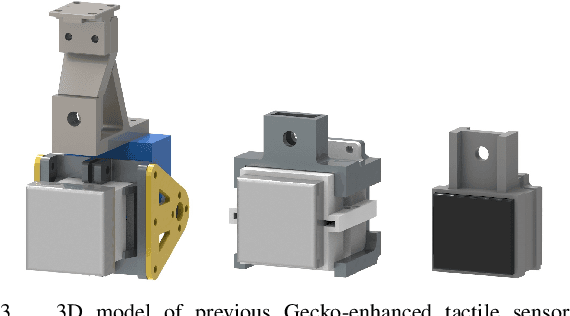
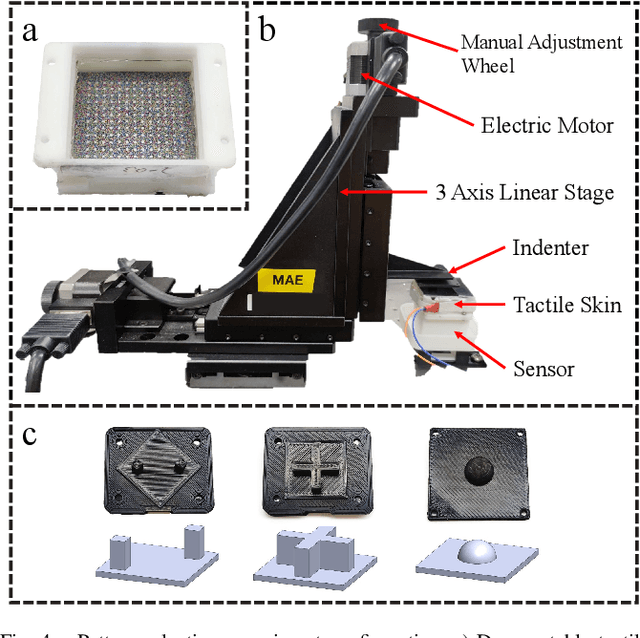
Tactile sensing is an essential perception for robots to complete dexterous tasks. As a promising tactile sensing technique, vision-based tactile sensors have been developed to improve robot performance in manipulation and grasping. Here we propose a new design of vision-based tactile sensor, DelTact, with its high-resolution sensing abilities of surface contact measurement. The sensor uses a modular hardware architecture for compactness whilst maintaining a robust overall design. Moreover, it adopts an improved dense random color pattern based on the previous version to achieve high accuracy of contact deformation tracking. In particular, we optimize the color pattern generation process and select the appropriate pattern for coordinating with a dense optical flow algorithm in a real-world experimental sensory setting using various objects for contact. The optical flow obtained from the raw image is processed to determine shape and force distribution on the contact surface. This sensor can be easily integrated with a parallel gripper where experimental results using qualitative and quantitative analysis demonstrate that the sensor is capable of providing tactile measurements with high temporal and spatial resolution.
A Tactile Sensing Foot for Single Robot Leg Stabilization
Mar 26, 2021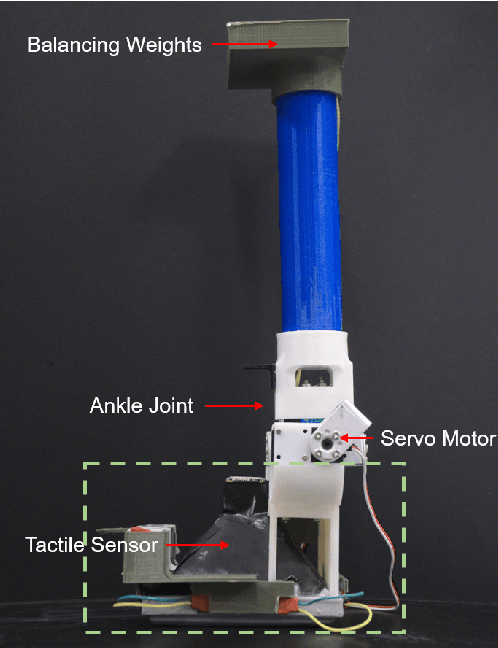
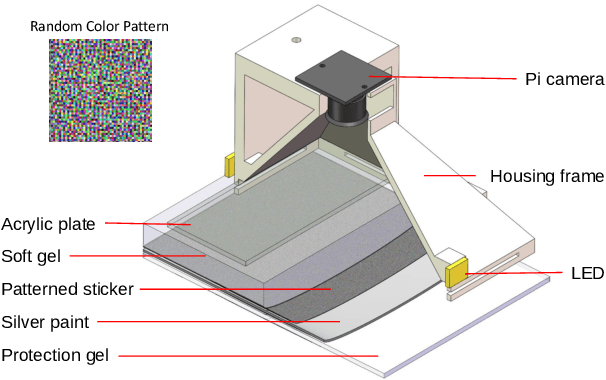

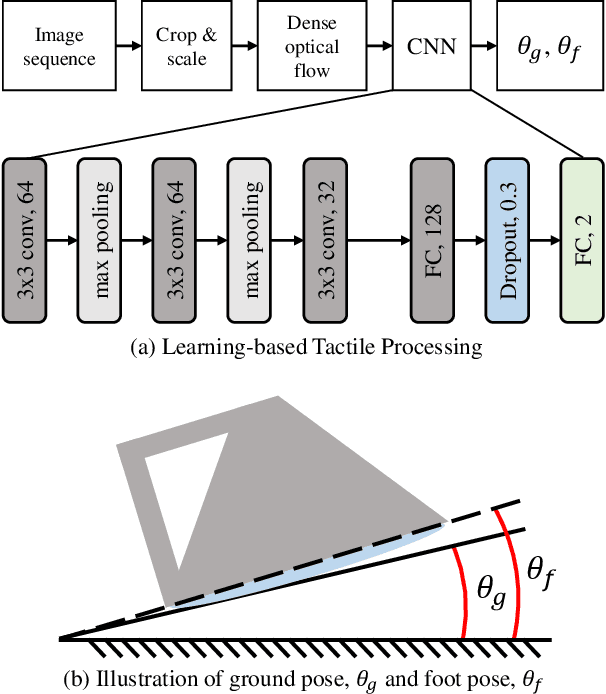
Tactile sensing on human feet is crucial for motion control, however, has not been explored in robotic counterparts. This work is dedicated to endowing tactile sensing to legged robot's feet and showing that a single-legged robot can be stabilized with only tactile sensing signals from its foot. We propose a robot leg with a novel vision-based tactile sensing foot system and implement a processing algorithm to extract contact information for feedback control in stabilizing tasks. A pipeline to convert images of the foot skin into high-level contact information using a deep learning framework is presented. The leg was quantitatively evaluated in a stabilization task on a tilting surface to show that the tactile foot was able to estimate both the surface tilting angle and the foot poses. Feasibility and effectiveness of the tactile system were investigated qualitatively in comparison with conventional single-legged robotic systems using inertia measurement units (IMU). Experiments demonstrate the capability of vision-based tactile sensors in assisting legged robots to maintain stability on unknown terrains and the potential for regulating more complex motions for humanoid robots.
* 7 pages, 9 figures, ICRA2021