 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDelTact: A Vision-based Tactile Sensor Using Dense Color Pattern
Paper and Code
Feb 15, 2022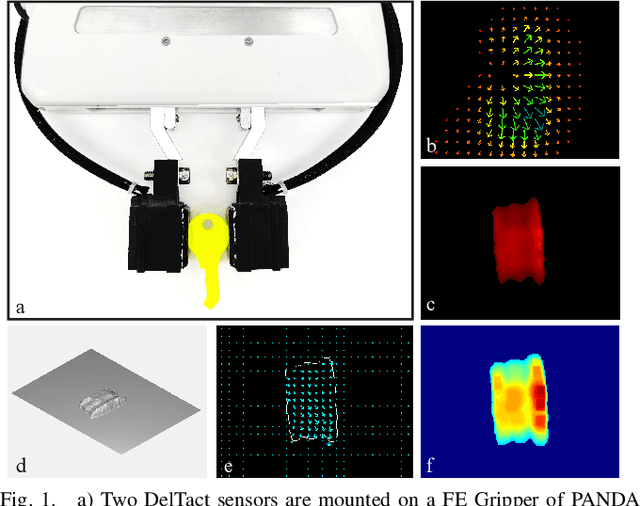
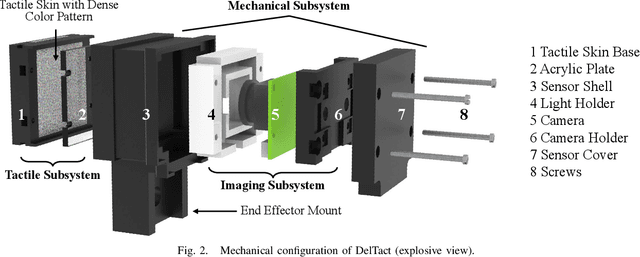
Tactile sensing is an essential perception for robots to complete dexterous tasks. As a promising tactile sensing technique, vision-based tactile sensors have been developed to improve robot performance in manipulation and grasping. Here we propose a new design of vision-based tactile sensor, DelTact, with its high-resolution sensing abilities of surface contact measurement. The sensor uses a modular hardware architecture for compactness whilst maintaining a robust overall design. Moreover, it adopts an improved dense random color pattern based on the previous version to achieve high accuracy of contact deformation tracking. In particular, we optimize the color pattern generation process and select the appropriate pattern for coordinating with a dense optical flow algorithm in a real-world experimental sensory setting using various objects for contact. The optical flow obtained from the raw image is processed to determine shape and force distribution on the contact surface. This sensor can be easily integrated with a parallel gripper where experimental results using qualitative and quantitative analysis demonstrate that the sensor is capable of providing tactile measurements with high temporal and spatial resolution.