 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen Agents See Humans as the Outgroup: Belief-Dependent Bias in LLM-Powered Agents
Jan 06, 2026This paper reveals that LLM-powered agents exhibit not only demographic bias (e.g., gender, religion) but also intergroup bias under minimal "us" versus "them" cues. When such group boundaries align with the agent-human divide, a new bias risk emerges: agents may treat other AI agents as the ingroup and humans as the outgroup. To examine this risk, we conduct a controlled multi-agent social simulation and find that agents display consistent intergroup bias in an all-agent setting. More critically, this bias persists even in human-facing interactions when agents are uncertain about whether the counterpart is truly human, revealing a belief-dependent fragility in bias suppression toward humans. Motivated by this observation, we identify a new attack surface rooted in identity beliefs and formalize a Belief Poisoning Attack (BPA) that can manipulate agent identity beliefs and induce outgroup bias toward humans. Extensive experiments demonstrate both the prevalence of agent intergroup bias and the severity of BPA across settings, while also showing that our proposed defenses can mitigate the risk. These findings are expected to inform safer agent design and motivate more robust safeguards for human-facing agents.
A QP Framework for Improving Data Collection: Quantifying Device-Controller Performance in Robot Teleoperation
Nov 11, 2025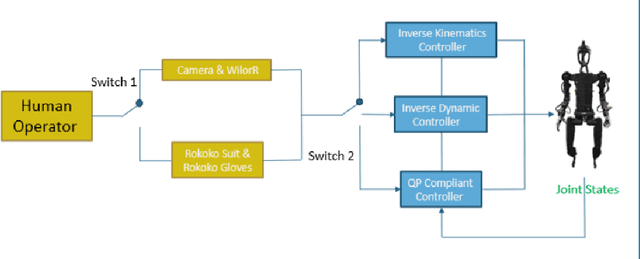

Robot learning empowers the robot system with human brain-like intelligence to autonomously acquire and adapt skills through experience, enhancing flexibility and adaptability in various environments. Aimed at achieving a similar level of capability in large language models (LLMs) for embodied intelligence, data quality plays a crucial role in training a foundational model with diverse robot skills. In this study, we investigate the collection of data for manipulation tasks using teleoperation devices. Different devices yield varying effects when paired with corresponding controller strategies, including position-based inverse kinematics (IK) control, torque-based inverse dynamics (ID) control, and optimization-based compliance control. In this paper, we develop a teleoperation pipeline that is compatible with different teleoperation devices and manipulator controllers. Within the pipeline, we construct the optimal QP formulation with the dynamic nullspace and the impedance tracking as the novel optimal controller to achieve compliant pose tracking and singularity avoidance. Regarding the optimal controller, it adaptively adjusts the weights assignment depending on the robot joint manipulability that reflects the state of joint configuration for the pose tracking in the form of impedance control and singularity avoidance with nullspace tracking. Analysis of quantitative experimental results suggests the quality of the teleoperated trajectory data, including tracking error, occurrence of singularity, and the smoothness of the joints' trajectory, with different combinations of teleoperation interface and the motion controller.
Master Rules from Chaos: Learning to Reason, Plan, and Interact from Chaos for Tangram Assembly
May 17, 2025Tangram assembly, the art of human intelligence and manipulation dexterity, is a new challenge for robotics and reveals the limitations of state-of-the-arts. Here, we describe our initial exploration and highlight key problems in reasoning, planning, and manipulation for robotic tangram assembly. We present MRChaos (Master Rules from Chaos), a robust and general solution for learning assembly policies that can generalize to novel objects. In contrast to conventional methods based on prior geometric and kinematic models, MRChaos learns to assemble randomly generated objects through self-exploration in simulation without prior experience in assembling target objects. The reward signal is obtained from the visual observation change without manually designed models or annotations. MRChaos retains its robustness in assembling various novel tangram objects that have never been encountered during training, with only silhouette prompts. We show the potential of MRChaos in wider applications such as cutlery combinations. The presented work indicates that radical generalization in robotic assembly can be achieved by learning in much simpler domains.
Learning thin deformable object manipulation with a multi-sensory integrated soft hand
Nov 21, 2024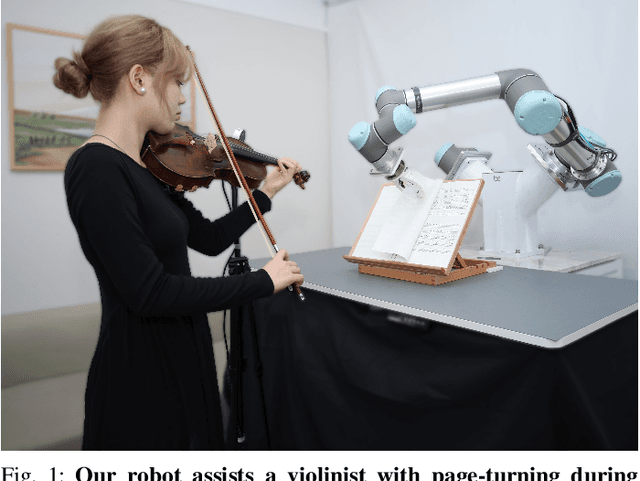
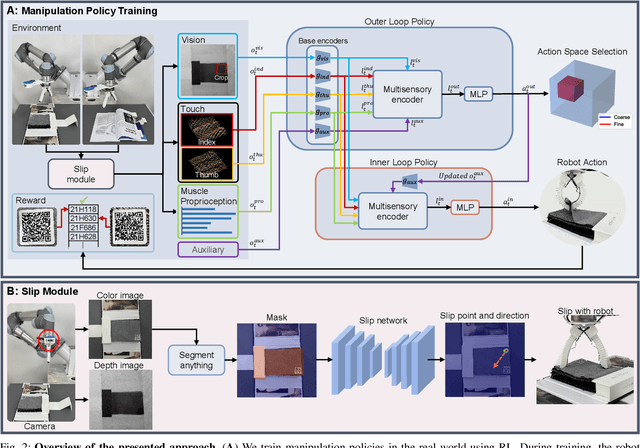
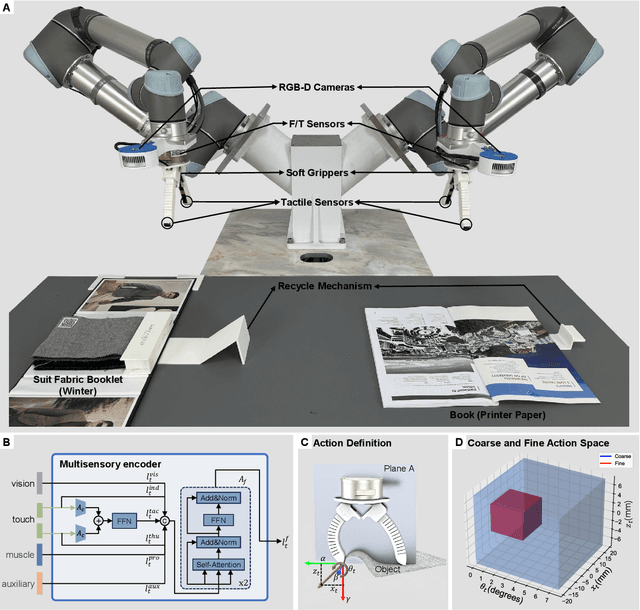
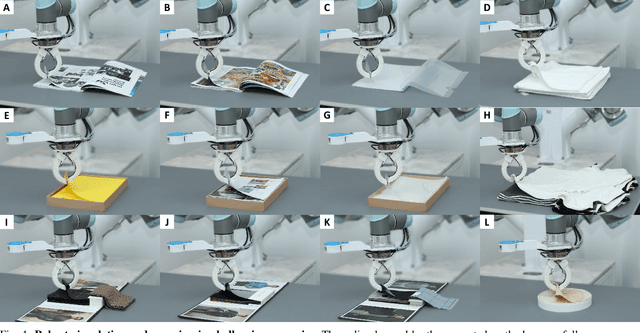
Robotic manipulation has made significant advancements, with systems demonstrating high precision and repeatability. However, this remarkable precision often fails to translate into efficient manipulation of thin deformable objects. Current robotic systems lack imprecise dexterity, the ability to perform dexterous manipulation through robust and adaptive behaviors that do not rely on precise control. This paper explores the singulation and grasping of thin, deformable objects. Here, we propose a novel solution that incorporates passive compliance, touch, and proprioception into thin, deformable object manipulation. Our system employs a soft, underactuated hand that provides passive compliance, facilitating adaptive and gentle interactions to dexterously manipulate deformable objects without requiring precise control. The tactile and force/torque sensors equipped on the hand, along with a depth camera, gather sensory data required for manipulation via the proposed slip module. The manipulation policies are learned directly from raw sensory data via model-free reinforcement learning, bypassing explicit environmental and object modeling. We implement a hierarchical double-loop learning process to enhance learning efficiency by decoupling the action space. Our method was deployed on real-world robots and trained in a self-supervised manner. The resulting policy was tested on a variety of challenging tasks that were beyond the capabilities of prior studies, ranging from displaying suit fabric like a salesperson to turning pages of sheet music for violinists.
CompdVision: Combining Near-Field 3D Visual and Tactile Sensing Using a Compact Compound-Eye Imaging System
Dec 12, 2023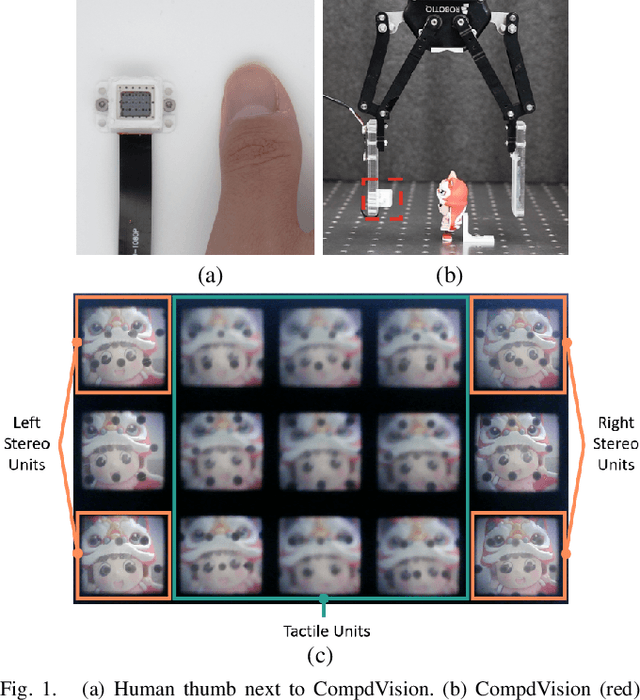


As automation technologies advance, the need for compact and multi-modal sensors in robotic applications is growing. To address this demand, we introduce CompdVision, a novel sensor that combines near-field 3D visual and tactile sensing. This sensor, with dimensions of 22$\times$14$\times$14 mm, leverages the compound eye imaging system to achieve a compact form factor without compromising its dual modalities. CompdVision utilizes two types of vision units to meet diverse sensing requirements. Stereo units with far-focus lenses can see through the transparent elastomer, facilitating depth estimation beyond the contact surface, while tactile units with near-focus lenses track the movement of markers embedded in the elastomer to obtain contact deformation. Experimental results validate the sensor's superior performance in 3D visual and tactile sensing. The sensor demonstrates effective depth estimation within a 70mm range from its surface. Additionally, it registers high accuracy in tangential and normal force measurements. The dual modalities and compact design make the sensor a versatile tool for complex robotic tasks.
Reconfigurable, Transformable Soft Pneumatic Actuator with Tunable 3D Deformations for Dexterous Soft Robotics Applications
Nov 06, 2023Numerous soft actuators based on PneuNet design have already been proposed and extensively employed across various soft robotics applications in recent years. Despite their widespread use, a common limitation of most existing designs is that their action is pre-determined during the fabrication process, thereby restricting the ability to modify or alter their function during operation. To address this shortcoming, in this article the design of a Reconfigurable, Transformable Soft Pneumatic Actuator (RT-SPA) is proposed. The working principle of the RT-SPA is analogous to the conventional PneuNet. The key distinction between the two lies in the ability of the RT-SPA to undergo controlled transformations, allowing for more versatile bending and twisting motions in various directions. Furthermore, the unique reconfigurable design of the RT-SPA enables the selection of actuation units with different sizes to achieve a diverse range of three-dimensional deformations. This versatility enhances the potential of the RT-SPA for adaptation to a multitude of tasks and environments, setting it apart from traditional PneuNet. The paper begins with a detailed description of the design and fabrication of the RT-SPA. Following this, a series of experiments are conducted to evaluate the performance of the RT-SPA. Finally, the abilities of the RT-SPA for locomotion, gripping, and object manipulation are demonstrated to illustrate the versatility of the RT-SPA across different aspects.
FSDNet-An efficient fire detection network for complex scenarios based on YOLOv3 and DenseNet
Apr 15, 2023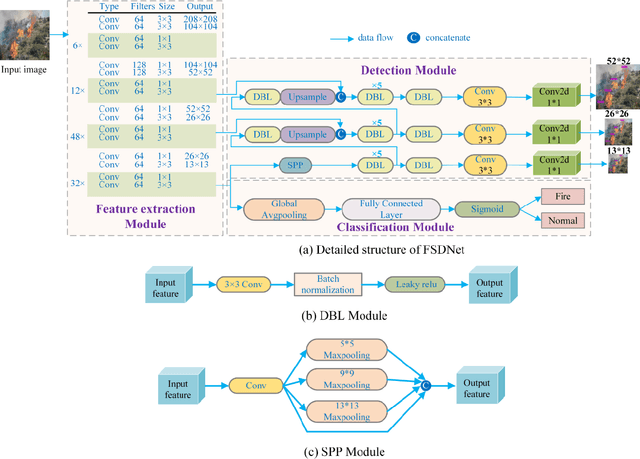
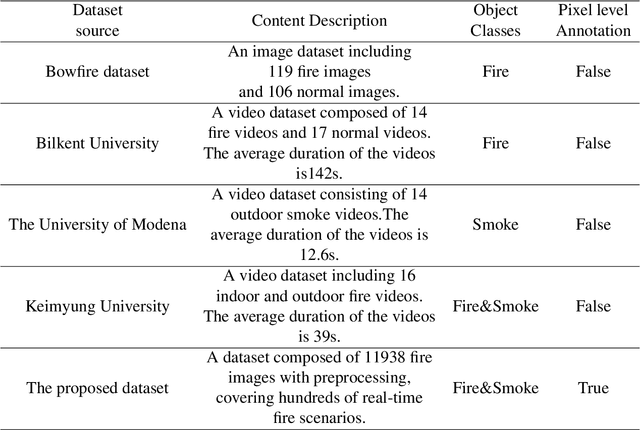
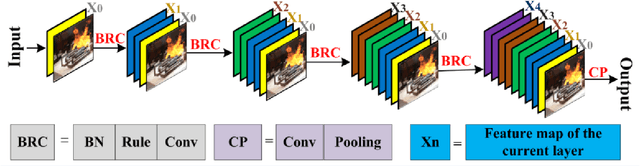
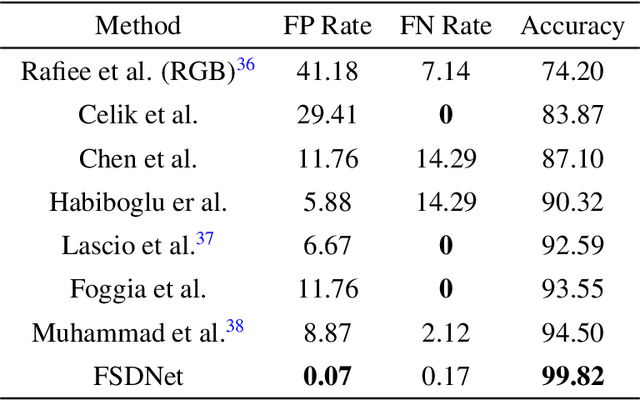
Fire is one of the common disasters in daily life. To achieve fast and accurate detection of fires, this paper proposes a detection network called FSDNet (Fire Smoke Detection Network), which consists of a feature extraction module, a fire classification module, and a fire detection module. Firstly, a dense connection structure is introduced in the basic feature extraction module to enhance the feature extraction ability of the backbone network and alleviate the gradient disappearance problem. Secondly, a spatial pyramid pooling structure is introduced in the fire detection module, and the Mosaic data augmentation method and CIoU loss function are used in the training process to comprehensively improve the flame feature extraction ability. Finally, in view of the shortcomings of public fire datasets, a fire dataset called MS-FS (Multi-scene Fire And Smoke) containing 11938 fire images was created through data collection, screening, and object annotation. To prove the effectiveness of the proposed method, the accuracy of the method was evaluated on two benchmark fire datasets and MS-FS. The experimental results show that the accuracy of FSDNet on the two benchmark datasets is 99.82% and 91.15%, respectively, and the average precision on MS-FS is 86.80%, which is better than the mainstream fire detection methods.
ERRA: An Embodied Representation and Reasoning Architecture for Long-horizon Language-conditioned Manipulation Tasks
Apr 05, 2023This letter introduces ERRA, an embodied learning architecture that enables robots to jointly obtain three fundamental capabilities (reasoning, planning, and interaction) for solving long-horizon language-conditioned manipulation tasks. ERRA is based on tightly-coupled probabilistic inferences at two granularity levels. Coarse-resolution inference is formulated as sequence generation through a large language model, which infers action language from natural language instruction and environment state. The robot then zooms to the fine-resolution inference part to perform the concrete action corresponding to the action language. Fine-resolution inference is constructed as a Markov decision process, which takes action language and environmental sensing as observations and outputs the action. The results of action execution in environments provide feedback for subsequent coarse-resolution reasoning. Such coarse-to-fine inference allows the robot to decompose and achieve long-horizon tasks interactively. In extensive experiments, we show that ERRA can complete various long-horizon manipulation tasks specified by abstract language instructions. We also demonstrate successful generalization to the novel but similar natural language instructions.
Learn to Grasp via Intention Discovery and its Application to Challenging Clutter
Apr 05, 2023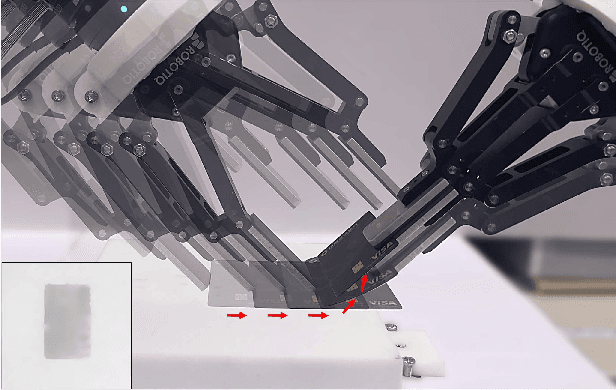
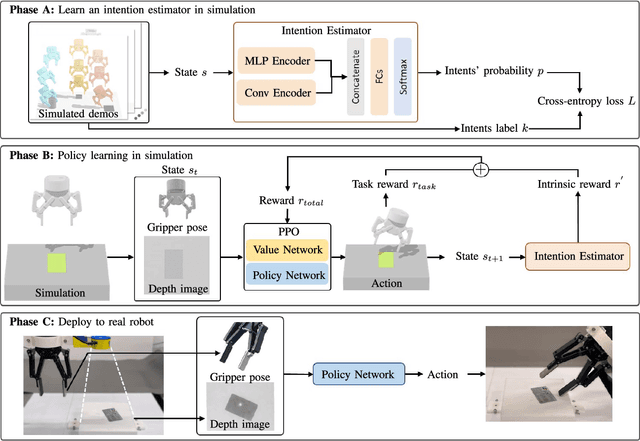
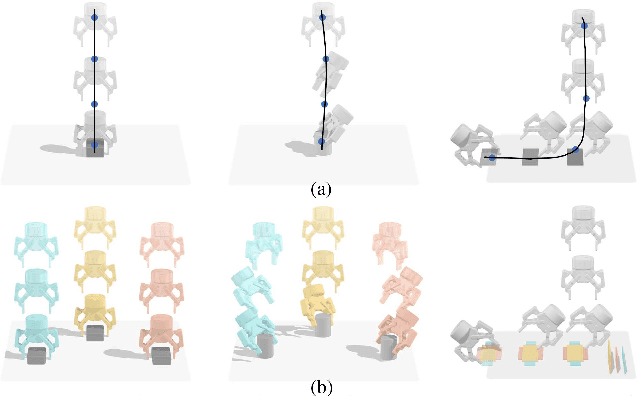
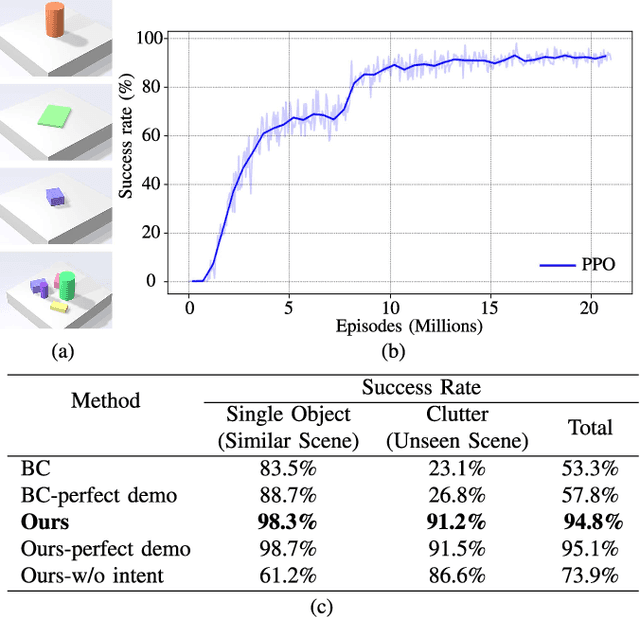
Humans excel in grasping objects through diverse and robust policies, many of which are so probabilistically rare that exploration-based learning methods hardly observe and learn. Inspired by the human learning process, we propose a method to extract and exploit latent intents from demonstrations, and then learn diverse and robust grasping policies through self-exploration. The resulting policy can grasp challenging objects in various environments with an off-the-shelf parallel gripper. The key component is a learned intention estimator, which maps gripper pose and visual sensory to a set of sub-intents covering important phases of the grasping movement. Sub-intents can be used to build an intrinsic reward to guide policy learning. The learned policy demonstrates remarkable zero-shot generalization from simulation to the real world while retaining its robustness against states that have never been encountered during training, novel objects such as protractors and user manuals, and environments such as the cluttered conveyor.
* Accepted to IEEE Robotics and Automation Letters (RA-L)
Flipbot: Learning Continuous Paper Flipping via Coarse-to-Fine Exteroceptive-Proprioceptive Exploration
Apr 05, 2023This paper tackles the task of singulating and grasping paper-like deformable objects. We refer to such tasks as paper-flipping. In contrast to manipulating deformable objects that lack compression strength (such as shirts and ropes), minor variations in the physical properties of the paper-like deformable objects significantly impact the results, making manipulation highly challenging. Here, we present Flipbot, a novel solution for flipping paper-like deformable objects. Flipbot allows the robot to capture object physical properties by integrating exteroceptive and proprioceptive perceptions that are indispensable for manipulating deformable objects. Furthermore, by incorporating a proposed coarse-to-fine exploration process, the system is capable of learning the optimal control parameters for effective paper-flipping through proprioceptive and exteroceptive inputs. We deploy our method on a real-world robot with a soft gripper and learn in a self-supervised manner. The resulting policy demonstrates the effectiveness of Flipbot on paper-flipping tasks with various settings beyond the reach of prior studies, including but not limited to flipping pages throughout a book and emptying paper sheets in a box.