 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCalibrating Adaptive Smoothing Methods for Freeway Traffic Reconstruction
Feb 02, 2026The adaptive smoothing method (ASM) is a widely used approach for traffic state reconstruction. This article presents a Python implementation of ASM, featuring end-to-end calibration using real-world ground truth data. The calibration is formulated as a parameterized kernel optimization problem. The model is calibrated using data from a full-state observation testbed, with input from a sparse radar sensor network. The implementation is developed in PyTorch, enabling integration with various deep learning methods. We evaluate the results in terms of speed distribution, spatio-temporal error distribution, and spatial error to provide benchmark metrics for the traffic reconstruction problem. We further demonstrate the usability of the calibrated method across multiple freeways. Finally, we discuss the challenges of reproducibility in general traffic model calibration and the limitations of ASM. This article is reproducible and can serve as a benchmark for various freeway operation tasks.
Measuring the State of Open Science in Transportation Using Large Language Models
Jan 20, 2026Open science initiatives have strengthened scientific integrity and accelerated research progress across many fields, but the state of their practice within transportation research remains under-investigated. Key features of open science, defined here as data and code availability, are difficult to extract due to the inherent complexity of the field. Previous work has either been limited to small-scale studies due to the labor-intensive nature of manual analysis or has relied on large-scale bibliometric approaches that sacrifice contextual richness. This paper introduces an automatic and scalable feature-extraction pipeline to measure data and code availability in transportation research. We employ Large Language Models (LLMs) for this task and validate their performance against a manually curated dataset and through an inter-rater agreement analysis. We applied this pipeline to examine 10,724 research articles published in the Transportation Research Part series of journals between 2019 and 2024. Our analysis found that only 5% of quantitative papers shared a code repository, 4% of quantitative papers shared a data repository, and about 3% of papers shared both, with trends differing across journals, topics, and geographic regions. We found no significant difference in citation counts or review duration between papers that provided data and code and those that did not, suggesting a misalignment between open science efforts and traditional academic metrics. Consequently, encouraging these practices will likely require structural interventions from journals and funding agencies to supplement the lack of direct author incentives. The pipeline developed in this study can be readily scaled to other journals, representing a critical step toward the automated measurement and monitoring of open science practices in transportation research.
Noise-Aware Generative Microscopic Traffic Simulation
Aug 10, 2025Accurately modeling individual vehicle behavior in microscopic traffic simulation remains a key challenge in intelligent transportation systems, as it requires vehicles to realistically generate and respond to complex traffic phenomena such as phantom traffic jams. While traditional human driver simulation models offer computational tractability, they do so by abstracting away the very complexity that defines human driving. On the other hand, recent advances in infrastructure-mounted camera-based roadway sensing have enabled the extraction of vehicle trajectory data, presenting an opportunity to shift toward generative, agent-based models. Yet, a major bottleneck remains: most existing datasets are either overly sanitized or lack standardization, failing to reflect the noisy, imperfect nature of real-world sensing. Unlike data from vehicle-mounted sensors-which can mitigate sensing artifacts like occlusion through overlapping fields of view and sensor fusion-infrastructure-based sensors surface a messier, more practical view of challenges that traffic engineers encounter. To this end, we present the I-24 MOTION Scenario Dataset (I24-MSD)-a standardized, curated dataset designed to preserve a realistic level of sensor imperfection, embracing these errors as part of the learning problem rather than an obstacle to overcome purely from preprocessing. Drawing from noise-aware learning strategies in computer vision, we further adapt existing generative models in the autonomous driving community for I24-MSD with noise-aware loss functions. Our results show that such models not only outperform traditional baselines in realism but also benefit from explicitly engaging with, rather than suppressing, data imperfection. We view I24-MSD as a stepping stone toward a new generation of microscopic traffic simulation that embraces the real-world challenges and is better aligned with practical needs.
Preliminary Explorations with GPT-4o(mni) Native Image Generation
May 06, 2025



Recently, the visual generation ability by GPT-4o(mni) has been unlocked by OpenAI. It demonstrates a very remarkable generation capability with excellent multimodal condition understanding and varied task instructions. In this paper, we aim to explore the capabilities of GPT-4o across various tasks. Inspired by previous study, we constructed a task taxonomy along with a carefully curated set of test samples to conduct a comprehensive qualitative test. Benefiting from GPT-4o's powerful multimodal comprehension, its image-generation process demonstrates abilities surpassing those of traditional image-generation tasks. Thus, regarding the dimensions of model capabilities, we evaluate its performance across six task categories: traditional image generation tasks, discriminative tasks, knowledge-based generation, commonsense-based generation, spatially-aware image generation, and temporally-aware image generation. These tasks not only assess the quality and conditional alignment of the model's outputs but also probe deeper into GPT-4o's understanding of real-world concepts. Our results reveal that GPT-4o performs impressively well in general-purpose synthesis tasks, showing strong capabilities in text-to-image generation, visual stylization, and low-level image processing. However, significant limitations remain in its ability to perform precise spatial reasoning, instruction-grounded generation, and consistent temporal prediction. Furthermore, when faced with knowledge-intensive or domain-specific scenarios, such as scientific illustrations or mathematical plots, the model often exhibits hallucinations, factual errors, or structural inconsistencies. These findings suggest that while GPT-4o marks a substantial advancement in unified multimodal generation, there is still a long way to go before it can be reliably applied to professional or safety-critical domains.
FT-AED: Benchmark Dataset for Early Freeway Traffic Anomalous Event Detection
Jun 24, 2024



Early and accurate detection of anomalous events on the freeway, such as accidents, can improve emergency response and clearance. However, existing delays and errors in event identification and reporting make it a difficult problem to solve. Current large-scale freeway traffic datasets are not designed for anomaly detection and ignore these challenges. In this paper, we introduce the first large-scale lane-level freeway traffic dataset for anomaly detection. Our dataset consists of a month of weekday radar detection sensor data collected in 4 lanes along an 18-mile stretch of Interstate 24 heading toward Nashville, TN, comprising over 3.7 million sensor measurements. We also collect official crash reports from the Nashville Traffic Management Center and manually label all other potential anomalies in the dataset. To show the potential for our dataset to be used in future machine learning and traffic research, we benchmark numerous deep learning anomaly detection models on our dataset. We find that unsupervised graph neural network autoencoders are a promising solution for this problem and that ignoring spatial relationships leads to decreased performance. We demonstrate that our methods can reduce reporting delays by over 10 minutes on average while detecting 75% of crashes. Our dataset and all preprocessing code needed to get started are publicly released at https://vu.edu/ft-aed/ to facilitate future research.
A Middle Way to Traffic Enlightenment
Jan 29, 2024



This paper introduces a novel approach that seeks a middle ground for traffic control in multi-lane congestion, where prevailing traffic speeds are too fast, and speed recommendations designed to dampen traffic waves are too slow. Advanced controllers that modify the speed of an automated car for wave-dampening, eco-driving, or other goals, typically are designed with forward collision safety in mind. Our approach goes further, by considering how dangerous it can be for a controller to drive so slowly relative to prevailing traffic that it creates a significant issue for safety and comfort. This paper explores open-road scenarios where large gaps between prevailing speeds and desired speeds can exist, specifically when infrastructure-based variable speed limit systems are not strictly followed at all times by other drivers. Our designed, implemented, and deployed algorithm is able to follow variable speed limits when others also follow it, avoid collisions with vehicles ahead, and adapt to prevailing traffic when other motorists are traveling well above the posted speeds. The key is to reject unsafe speed recommendations from infrastructure-based traffic smoothing systems, based on real-time local traffic conditions observed by the vehicle under control. This solution is implemented and deployed on two control vehicles in heavy multi-lane highway congestion. The results include analysis from system design, and field tests that validate the system's performance using an existing Variable Speed Limit system as the external source for speed recommendations, and the on-board sensors of a stock Toyota Rav4 for inputs that estimate the prevailing speed of traffic around the vehicle under control.
Virtual trajectories for I-24 MOTION: data and tools
Nov 17, 2023



This article introduces a new virtual trajectory dataset derived from the I-24 MOTION INCEPTION v1.0.0 dataset to address challenges in analyzing large but noisy trajectory datasets. Building on the concept of virtual trajectories, we provide a Python implementation to generate virtual trajectories from large raw datasets that are typically challenging to process due to their size. We demonstrate the practical utility of these trajectories in assessing speed variability and travel times across different lanes within the INCEPTION dataset. The virtual trajectory dataset opens future research on traffic waves and their impact on energy.
So you think you can track?
Sep 13, 2023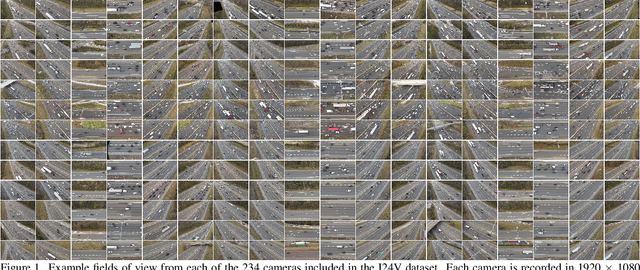
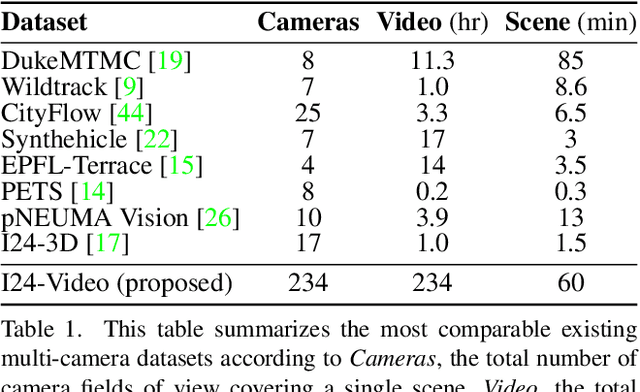
This work introduces a multi-camera tracking dataset consisting of 234 hours of video data recorded concurrently from 234 overlapping HD cameras covering a 4.2 mile stretch of 8-10 lane interstate highway near Nashville, TN. The video is recorded during a period of high traffic density with 500+ objects typically visible within the scene and typical object longevities of 3-15 minutes. GPS trajectories from 270 vehicle passes through the scene are manually corrected in the video data to provide a set of ground-truth trajectories for recall-oriented tracking metrics, and object detections are provided for each camera in the scene (159 million total before cross-camera fusion). Initial benchmarking of tracking-by-detection algorithms is performed against the GPS trajectories, and a best HOTA of only 9.5% is obtained (best recall 75.9% at IOU 0.1, 47.9 average IDs per ground truth object), indicating the benchmarked trackers do not perform sufficiently well at the long temporal and spatial durations required for traffic scene understanding.
I-24 MOTION: An instrument for freeway traffic science
Jan 30, 2023



The Interstate-24 MObility Technology Interstate Observation Network (I-24 MOTION) is a new instrument for traffic science located near Nashville, Tennessee. I-24 MOTION consists of 276 pole-mounted high-resolution traffic cameras that provide seamless coverage of approximately 4.2 miles I-24, a 4-5 lane (each direction) freeway with frequently observed congestion. The cameras are connected via fiber optic network to a compute facility where vehicle trajectories are extracted from the video imagery using computer vision techniques. Approximately 230 million vehicle miles of travel occur within I-24 MOTION annually. The main output of the instrument are vehicle trajectory datasets that contain the position of each vehicle on the freeway, as well as other supplementary information vehicle dimensions and class. This article describes the design and creation of the instrument, and provides the first publicly available datasets generated from the instrument. The datasets published with this article contains at least 4 hours of vehicle trajectory data for each of 10 days. As the system continues to mature, all trajectory data will be made publicly available at i24motion.org/data.
Time-reversal equivariant neural network potential and Hamiltonian for magnetic materials
Nov 21, 2022This work presents Time-reversal Equivariant Neural Network (TENN) framework. With TENN, the time-reversal symmetry is considered in the equivariant neural network (ENN), which generalizes the ENN to consider physical quantities related to time-reversal symmetry such as spin and velocity of atoms. TENN-e3, as the time-reversal-extension of E(3) equivariant neural network, is developed to keep the Time-reversal E(3) equivariant with consideration of whether to include the spin-orbit effect for both collinear and non-collinear magnetic moments situations for magnetic material. TENN-e3 can construct spin neural network potential and the Hamiltonian of magnetic material from ab-initio calculations. Time-reversal-E(3)-equivariant convolutions for interactions of spinor and geometric tensors are employed in TENN-e3. Compared to the popular ENN, TENN-e3 can describe the complex spin-lattice coupling with high accuracy and keep time-reversal symmetry which is not preserved in the existing E(3)-equivariant model. Also, the Hamiltonian of magnetic material with time-reversal symmetry can be built with TENN-e3. TENN paves a new way to spin-lattice dynamics simulations over long-time scales and electronic structure calculations of large-scale magnetic materials.