 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSupervised and Unsupervised Neural Network Solver for First Order Hyperbolic Nonlinear PDEs
Jan 10, 2026We present a neural network-based method for learning scalar hyperbolic conservation laws. Our method replaces the traditional numerical flux in finite volume schemes with a trainable neural network while preserving the conservative structure of the scheme. The model can be trained both in a supervised setting with efficiently generated synthetic data or in an unsupervised manner, leveraging the weak formulation of the partial differential equation. We provide theoretical results that our model can perform arbitrarily well, and provide associated upper bounds on neural network size. Extensive experiments demonstrate that our method often outperforms efficient schemes such as Godunov's scheme, WENO, and Discontinuous Galerkin for comparable computational budgets. Finally, we demonstrate the effectiveness of our method on a traffic prediction task, leveraging field experimental highway data from the Berkeley DeepDrive drone dataset.
Reinforcement Learning Based Oscillation Dampening: Scaling up Single-Agent RL algorithms to a 100 AV highway field operational test
Feb 26, 2024In this article, we explore the technical details of the reinforcement learning (RL) algorithms that were deployed in the largest field test of automated vehicles designed to smooth traffic flow in history as of 2023, uncovering the challenges and breakthroughs that come with developing RL controllers for automated vehicles. We delve into the fundamental concepts behind RL algorithms and their application in the context of self-driving cars, discussing the developmental process from simulation to deployment in detail, from designing simulators to reward function shaping. We present the results in both simulation and deployment, discussing the flow-smoothing benefits of the RL controller. From understanding the basics of Markov decision processes to exploring advanced techniques such as deep RL, our article offers a comprehensive overview and deep dive of the theoretical foundations and practical implementations driving this rapidly evolving field. We also showcase real-world case studies and alternative research projects that highlight the impact of RL controllers in revolutionizing autonomous driving. From tackling complex urban environments to dealing with unpredictable traffic scenarios, these intelligent controllers are pushing the boundaries of what automated vehicles can achieve. Furthermore, we examine the safety considerations and hardware-focused technical details surrounding deployment of RL controllers into automated vehicles. As these algorithms learn and evolve through interactions with the environment, ensuring their behavior aligns with safety standards becomes crucial. We explore the methodologies and frameworks being developed to address these challenges, emphasizing the importance of building reliable control systems for automated vehicles.
Enabling Mixed Autonomy Traffic Control
Oct 28, 2023



We demonstrate a new capability of automated vehicles: mixed autonomy traffic control. With this new capability, automated vehicles can shape the traffic flows composed of other non-automated vehicles, which has the promise to improve safety, efficiency, and energy outcomes in transportation systems at a societal scale. Investigating mixed autonomy mobile traffic control must be done in situ given that the complex dynamics of other drivers and their response to a team of automated vehicles cannot be effectively modeled. This capability has been blocked because there is no existing scalable and affordable platform for experimental control. This paper introduces an extensible open-source hardware and software platform, enabling a team of 100 vehicles to execute several different vehicular control algorithms as a collaborative fleet, composed of three different makes and models, which drove 22752 miles in a combined 1022 hours, over 5 days in Nashville, TN in November 2022.
So you think you can track?
Sep 13, 2023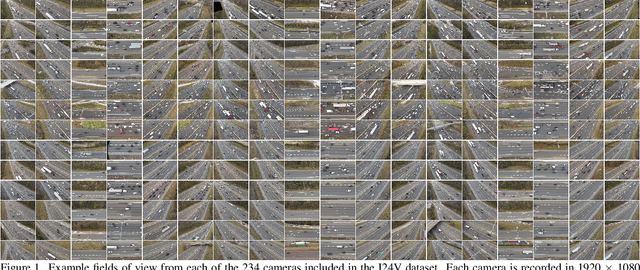
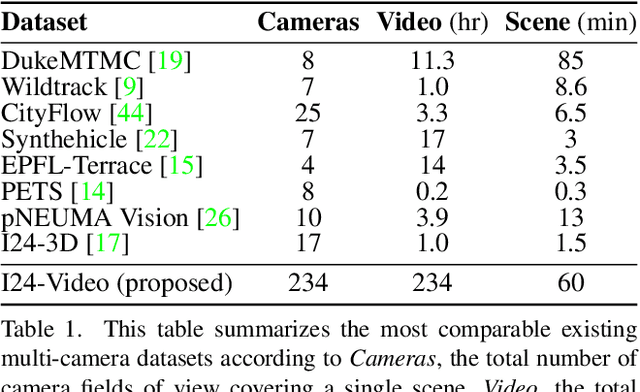
This work introduces a multi-camera tracking dataset consisting of 234 hours of video data recorded concurrently from 234 overlapping HD cameras covering a 4.2 mile stretch of 8-10 lane interstate highway near Nashville, TN. The video is recorded during a period of high traffic density with 500+ objects typically visible within the scene and typical object longevities of 3-15 minutes. GPS trajectories from 270 vehicle passes through the scene are manually corrected in the video data to provide a set of ground-truth trajectories for recall-oriented tracking metrics, and object detections are provided for each camera in the scene (159 million total before cross-camera fusion). Initial benchmarking of tracking-by-detection algorithms is performed against the GPS trajectories, and a best HOTA of only 9.5% is obtained (best recall 75.9% at IOU 0.1, 47.9 average IDs per ground truth object), indicating the benchmarked trackers do not perform sufficiently well at the long temporal and spatial durations required for traffic scene understanding.
A Review on Longitudinal Car-Following Model
Apr 14, 2023



The car-following (CF) model is the core component for traffic simulations and has been built-in in many production vehicles with Advanced Driving Assistance Systems (ADAS). Research of CF behavior allows us to identify the sources of different macro phenomena induced by the basic process of pairwise vehicle interaction. The CF behavior and control model encompasses various fields, such as traffic engineering, physics, cognitive science, machine learning, and reinforcement learning. This paper provides a comprehensive survey highlighting differences, complementarities, and overlaps among various CF models according to their underlying logic and principles. We reviewed representative algorithms, ranging from the theory-based kinematic models, stimulus-response models, and cruise control models to data-driven Behavior Cloning (BC) and Imitation Learning (IL) and outlined their strengths and limitations. This review categorizes CF models that are conceptualized in varying principles and summarize the vast literature with a holistic framework.
Spatial-Temporal Deep Embedding for Vehicle Trajectory Reconstruction from High-Angle Video
Sep 17, 2022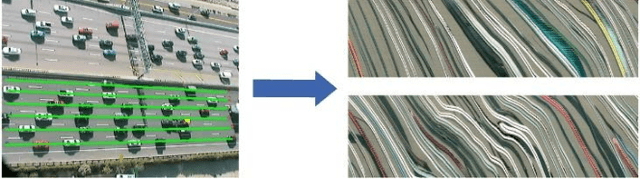
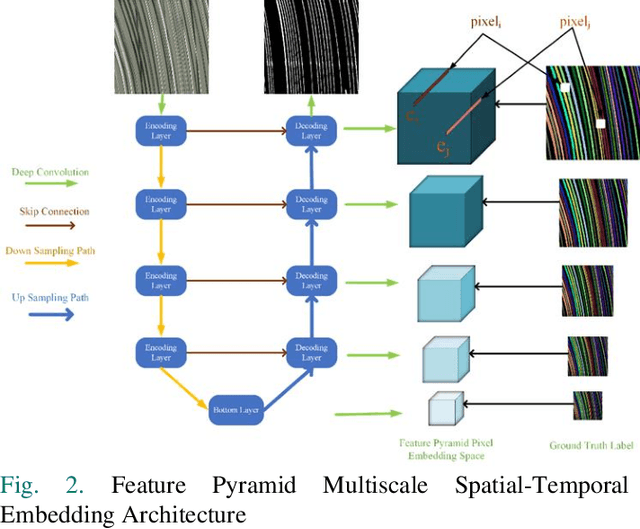
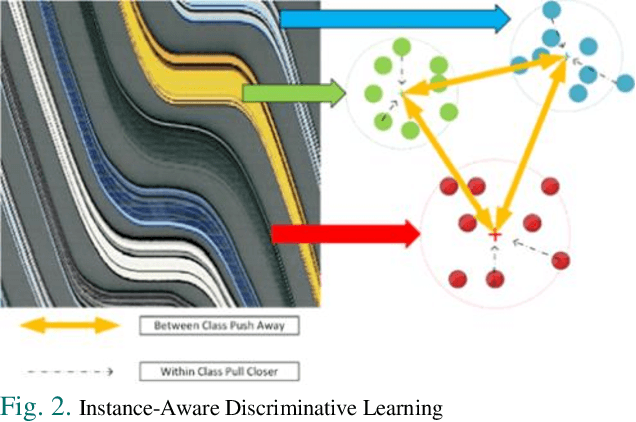

Spatial-temporal Map (STMap)-based methods have shown great potential to process high-angle videos for vehicle trajectory reconstruction, which can meet the needs of various data-driven modeling and imitation learning applications. In this paper, we developed Spatial-Temporal Deep Embedding (STDE) model that imposes parity constraints at both pixel and instance levels to generate instance-aware embeddings for vehicle stripe segmentation on STMap. At pixel level, each pixel was encoded with its 8-neighbor pixels at different ranges, and this encoding is subsequently used to guide a neural network to learn the embedding mechanism. At the instance level, a discriminative loss function is designed to pull pixels belonging to the same instance closer and separate the mean value of different instances far apart in the embedding space. The output of the spatial-temporal affinity is then optimized by the mutex-watershed algorithm to obtain final clustering results. Based on segmentation metrics, our model outperformed five other baselines that have been used for STMap processing and shows robustness under the influence of shadows, static noises, and overlapping. The designed model is applied to process all public NGSIM US-101 videos to generate complete vehicle trajectories, indicating a good scalability and adaptability. Last but not least, the strengths of the scanline method with STDE and future directions were discussed. Code, STMap dataset and video trajectory are made publicly available in the online repository. GitHub Link: shorturl.at/jklT0.
A deep language model to predict metabolic network equilibria
Dec 07, 2021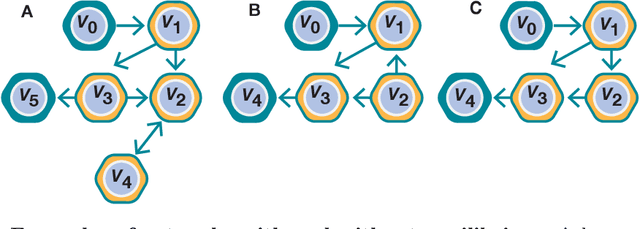
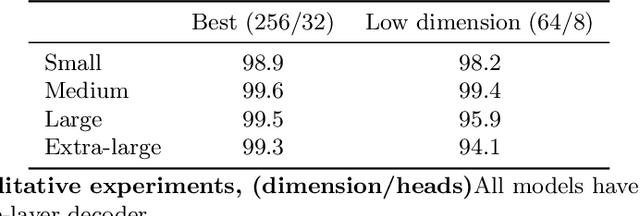


We show that deep learning models, and especially architectures like the Transformer, originally intended for natural language, can be trained on randomly generated datasets to predict to very high accuracy both the qualitative and quantitative features of metabolic networks. Using standard mathematical techniques, we create large sets (40 million elements) of random networks that can be used to train our models. These trained models can predict network equilibrium on random graphs in more than 99% of cases. They can also generalize to graphs with different structure than those encountered at training. Finally, they can predict almost perfectly the equilibria of a small set of known biological networks. Our approach is both very economical in experimental data and uses only small and shallow deep-learning model, far from the large architectures commonly used in machine translation. Such results pave the way for larger use of deep learning models for problems related to biological networks in key areas such as quantitative systems pharmacology, systems biology, and synthetic biology.