 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSupervised and Unsupervised Neural Network Solver for First Order Hyperbolic Nonlinear PDEs
Jan 10, 2026We present a neural network-based method for learning scalar hyperbolic conservation laws. Our method replaces the traditional numerical flux in finite volume schemes with a trainable neural network while preserving the conservative structure of the scheme. The model can be trained both in a supervised setting with efficiently generated synthetic data or in an unsupervised manner, leveraging the weak formulation of the partial differential equation. We provide theoretical results that our model can perform arbitrarily well, and provide associated upper bounds on neural network size. Extensive experiments demonstrate that our method often outperforms efficient schemes such as Godunov's scheme, WENO, and Discontinuous Galerkin for comparable computational budgets. Finally, we demonstrate the effectiveness of our method on a traffic prediction task, leveraging field experimental highway data from the Berkeley DeepDrive drone dataset.
(U)NFV: Supervised and Unsupervised Neural Finite Volume Methods for Solving Hyperbolic PDEs
May 29, 2025We introduce (U)NFV, a modular neural network architecture that generalizes classical finite volume (FV) methods for solving hyperbolic conservation laws. Hyperbolic partial differential equations (PDEs) are challenging to solve, particularly conservation laws whose physically relevant solutions contain shocks and discontinuities. FV methods are widely used for their mathematical properties: convergence to entropy solutions, flow conservation, or total variation diminishing, but often lack accuracy and flexibility in complex settings. Neural Finite Volume addresses these limitations by learning update rules over extended spatial and temporal stencils while preserving conservation structure. It supports both supervised training on solution data (NFV) and unsupervised training via weak-form residual loss (UNFV). Applied to first-order conservation laws, (U)NFV achieves up to 10x lower error than Godunov's method, outperforms ENO/WENO, and rivals discontinuous Galerkin solvers with far less complexity. On traffic modeling problems, both from PDEs and from experimental highway data, (U)NFV captures nonlinear wave dynamics with significantly higher fidelity and scalability than traditional FV approaches.
Reinforcement Learning Based Oscillation Dampening: Scaling up Single-Agent RL algorithms to a 100 AV highway field operational test
Feb 26, 2024In this article, we explore the technical details of the reinforcement learning (RL) algorithms that were deployed in the largest field test of automated vehicles designed to smooth traffic flow in history as of 2023, uncovering the challenges and breakthroughs that come with developing RL controllers for automated vehicles. We delve into the fundamental concepts behind RL algorithms and their application in the context of self-driving cars, discussing the developmental process from simulation to deployment in detail, from designing simulators to reward function shaping. We present the results in both simulation and deployment, discussing the flow-smoothing benefits of the RL controller. From understanding the basics of Markov decision processes to exploring advanced techniques such as deep RL, our article offers a comprehensive overview and deep dive of the theoretical foundations and practical implementations driving this rapidly evolving field. We also showcase real-world case studies and alternative research projects that highlight the impact of RL controllers in revolutionizing autonomous driving. From tackling complex urban environments to dealing with unpredictable traffic scenarios, these intelligent controllers are pushing the boundaries of what automated vehicles can achieve. Furthermore, we examine the safety considerations and hardware-focused technical details surrounding deployment of RL controllers into automated vehicles. As these algorithms learn and evolve through interactions with the environment, ensuring their behavior aligns with safety standards becomes crucial. We explore the methodologies and frameworks being developed to address these challenges, emphasizing the importance of building reliable control systems for automated vehicles.
Traffic Smoothing Controllers for Autonomous Vehicles Using Deep Reinforcement Learning and Real-World Trajectory Data
Jan 18, 2024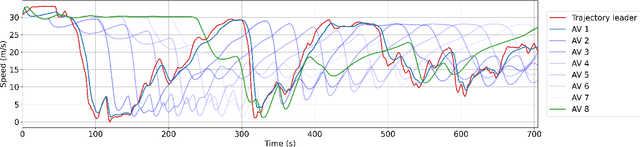
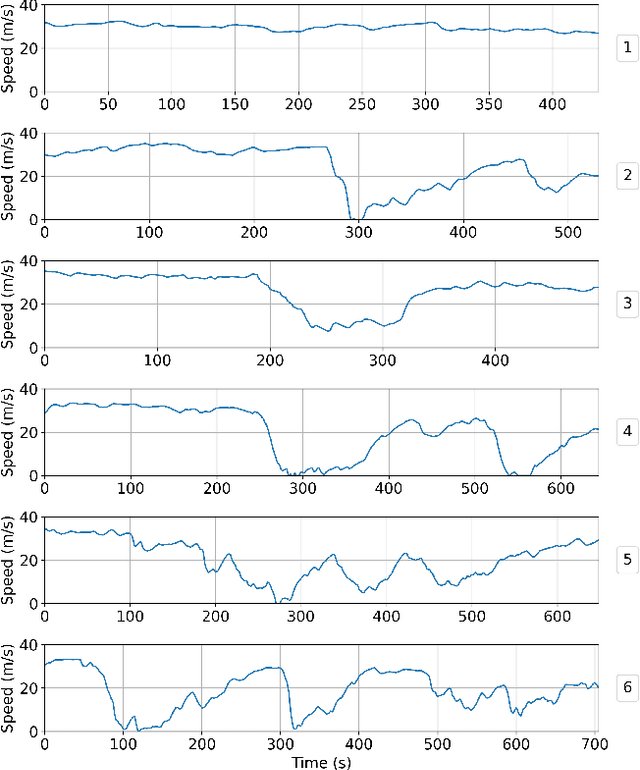
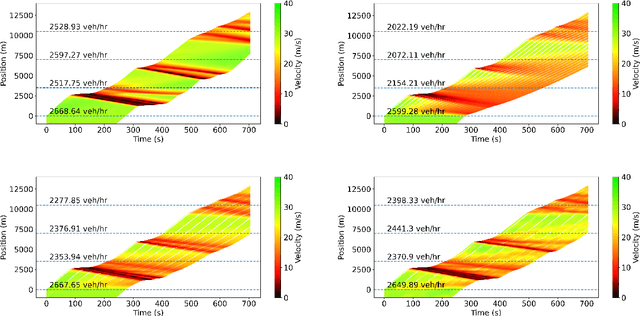
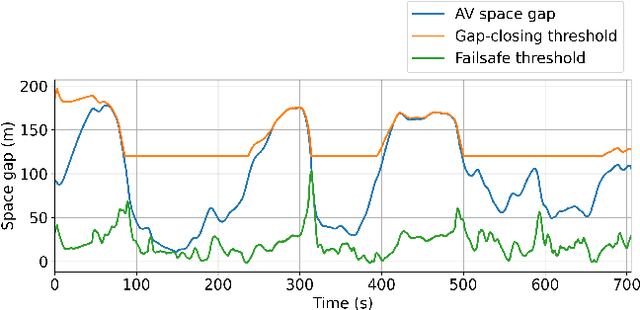
Designing traffic-smoothing cruise controllers that can be deployed onto autonomous vehicles is a key step towards improving traffic flow, reducing congestion, and enhancing fuel efficiency in mixed autonomy traffic. We bypass the common issue of having to carefully fine-tune a large traffic microsimulator by leveraging real-world trajectory data from the I-24 highway in Tennessee, replayed in a one-lane simulation. Using standard deep reinforcement learning methods, we train energy-reducing wave-smoothing policies. As an input to the agent, we observe the speed and distance of only the vehicle in front, which are local states readily available on most recent vehicles, as well as non-local observations about the downstream state of the traffic. We show that at a low 4% autonomous vehicle penetration rate, we achieve significant fuel savings of over 15% on trajectories exhibiting many stop-and-go waves. Finally, we analyze the smoothing effect of the controllers and demonstrate robustness to adding lane-changing into the simulation as well as the removal of downstream information.
Nocturne: a scalable driving benchmark for bringing multi-agent learning one step closer to the real world
Jun 20, 2022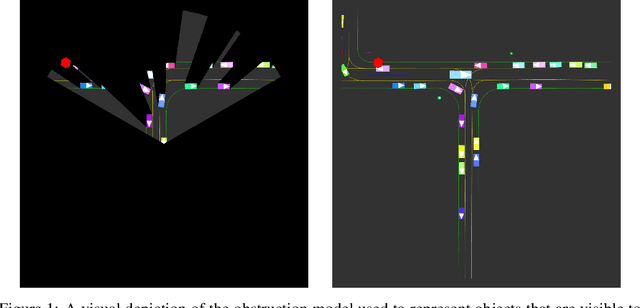
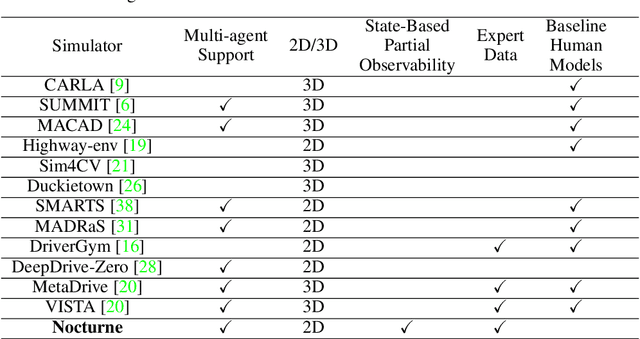
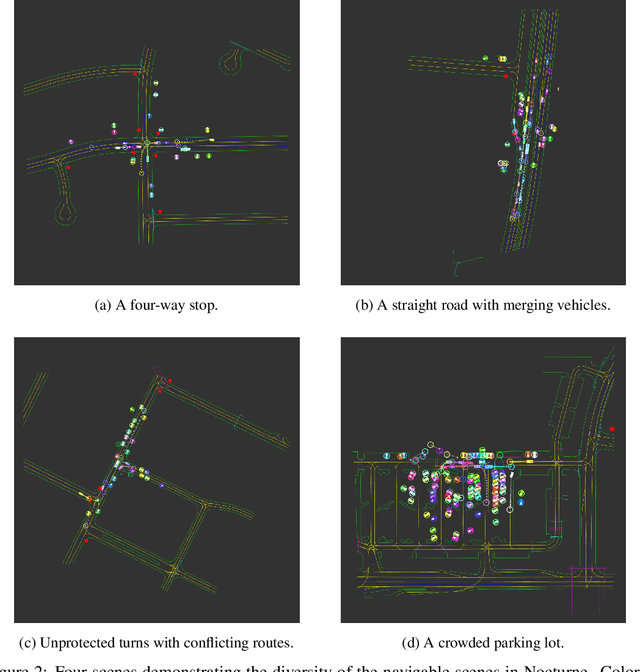

We introduce \textit{Nocturne}, a new 2D driving simulator for investigating multi-agent coordination under partial observability. The focus of Nocturne is to enable research into inference and theory of mind in real-world multi-agent settings without the computational overhead of computer vision and feature extraction from images. Agents in this simulator only observe an obstructed view of the scene, mimicking human visual sensing constraints. Unlike existing benchmarks that are bottlenecked by rendering human-like observations directly using a camera input, Nocturne uses efficient intersection methods to compute a vectorized set of visible features in a C++ back-end, allowing the simulator to run at $2000+$ steps-per-second. Using open-source trajectory and map data, we construct a simulator to load and replay arbitrary trajectories and scenes from real-world driving data. Using this environment, we benchmark reinforcement-learning and imitation-learning agents and demonstrate that the agents are quite far from human-level coordination ability and deviate significantly from the expert trajectories.