 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTraffic Smoothing Controllers for Autonomous Vehicles Using Deep Reinforcement Learning and Real-World Trajectory Data
Paper and Code
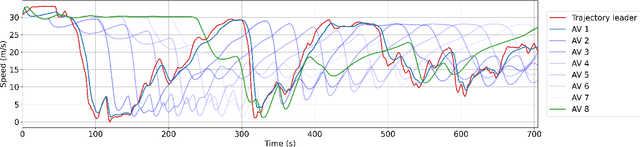
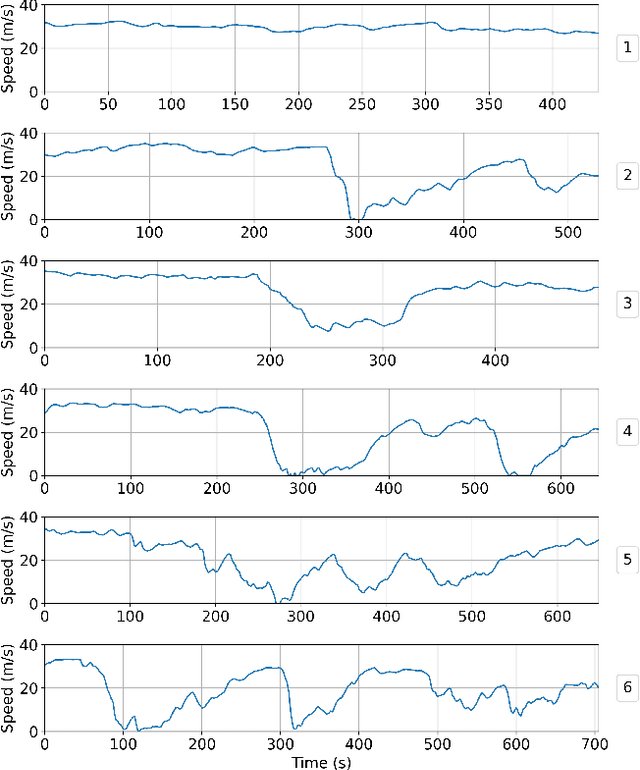
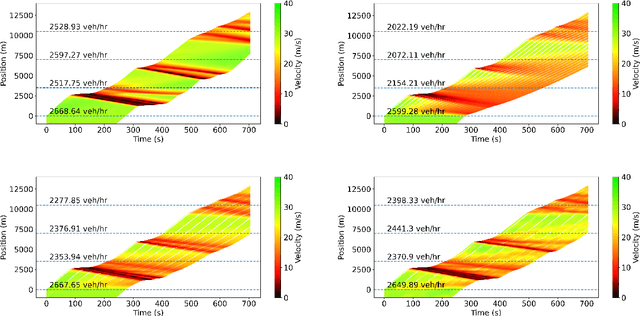
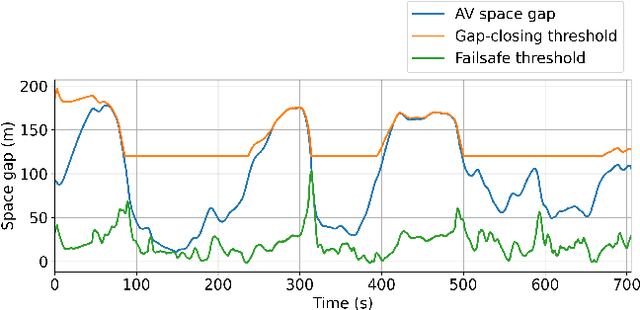
Designing traffic-smoothing cruise controllers that can be deployed onto autonomous vehicles is a key step towards improving traffic flow, reducing congestion, and enhancing fuel efficiency in mixed autonomy traffic. We bypass the common issue of having to carefully fine-tune a large traffic microsimulator by leveraging real-world trajectory data from the I-24 highway in Tennessee, replayed in a one-lane simulation. Using standard deep reinforcement learning methods, we train energy-reducing wave-smoothing policies. As an input to the agent, we observe the speed and distance of only the vehicle in front, which are local states readily available on most recent vehicles, as well as non-local observations about the downstream state of the traffic. We show that at a low 4% autonomous vehicle penetration rate, we achieve significant fuel savings of over 15% on trajectories exhibiting many stop-and-go waves. Finally, we analyze the smoothing effect of the controllers and demonstrate robustness to adding lane-changing into the simulation as well as the removal of downstream information.