 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSupervised and Unsupervised Neural Network Solver for First Order Hyperbolic Nonlinear PDEs
Jan 10, 2026We present a neural network-based method for learning scalar hyperbolic conservation laws. Our method replaces the traditional numerical flux in finite volume schemes with a trainable neural network while preserving the conservative structure of the scheme. The model can be trained both in a supervised setting with efficiently generated synthetic data or in an unsupervised manner, leveraging the weak formulation of the partial differential equation. We provide theoretical results that our model can perform arbitrarily well, and provide associated upper bounds on neural network size. Extensive experiments demonstrate that our method often outperforms efficient schemes such as Godunov's scheme, WENO, and Discontinuous Galerkin for comparable computational budgets. Finally, we demonstrate the effectiveness of our method on a traffic prediction task, leveraging field experimental highway data from the Berkeley DeepDrive drone dataset.
(U)NFV: Supervised and Unsupervised Neural Finite Volume Methods for Solving Hyperbolic PDEs
May 29, 2025We introduce (U)NFV, a modular neural network architecture that generalizes classical finite volume (FV) methods for solving hyperbolic conservation laws. Hyperbolic partial differential equations (PDEs) are challenging to solve, particularly conservation laws whose physically relevant solutions contain shocks and discontinuities. FV methods are widely used for their mathematical properties: convergence to entropy solutions, flow conservation, or total variation diminishing, but often lack accuracy and flexibility in complex settings. Neural Finite Volume addresses these limitations by learning update rules over extended spatial and temporal stencils while preserving conservation structure. It supports both supervised training on solution data (NFV) and unsupervised training via weak-form residual loss (UNFV). Applied to first-order conservation laws, (U)NFV achieves up to 10x lower error than Godunov's method, outperforms ENO/WENO, and rivals discontinuous Galerkin solvers with far less complexity. On traffic modeling problems, both from PDEs and from experimental highway data, (U)NFV captures nonlinear wave dynamics with significantly higher fidelity and scalability than traditional FV approaches.
Modular Framework for Uncertainty Prediction in Autonomous Vehicle Motion Forecasting within Complex Traffic Scenarios
Jan 27, 2025



We propose a modular modeling framework designed to enhance the capture and validation of uncertainty in autonomous vehicle (AV) trajectory prediction. Departing from traditional deterministic methods, our approach employs a flexible, end-to-end differentiable probabilistic encoder-decoder architecture. This modular design allows the encoder and decoder to be trained independently, enabling seamless adaptation to diverse traffic scenarios without retraining the entire system. Our key contributions include: (1) a probabilistic heatmap predictor that generates context-aware occupancy grids for dynamic forecasting, (2) a modular training approach that supports independent component training and flexible adaptation, and (3) a structured validation scheme leveraging uncertainty metrics to evaluate robustness under high-risk conditions. To highlight the benefits of our framework, we benchmark it against an end-to-end baseline, demonstrating faster convergence, improved stability, and flexibility. Experimental results validate these advantages, showcasing the capacity of the framework to efficiently handle complex scenarios while ensuring reliable predictions and robust uncertainty representation. This modular design offers significant practical utility and scalability for real-world autonomous driving applications.
Strategizing Equitable Transit Evacuations: A Data-Driven Reinforcement Learning Approach
Dec 08, 2024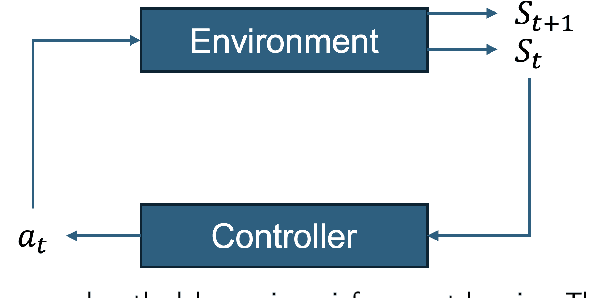

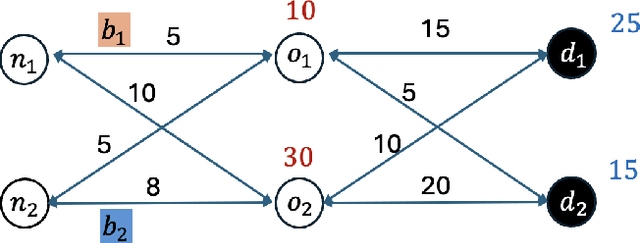
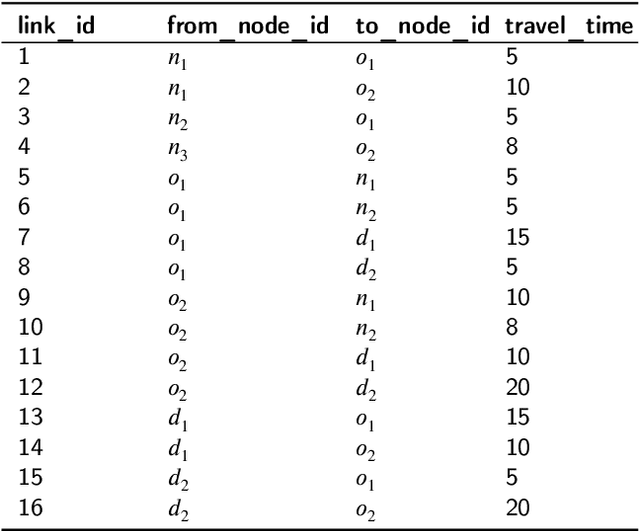
As natural disasters become increasingly frequent, the need for efficient and equitable evacuation planning has become more critical. This paper proposes a data-driven, reinforcement learning-based framework to optimize bus-based evacuations with an emphasis on improving both efficiency and equity. We model the evacuation problem as a Markov Decision Process solved by reinforcement learning, using real-time transit data from General Transit Feed Specification and transportation networks extracted from OpenStreetMap. The reinforcement learning agent dynamically reroutes buses from their scheduled location to minimize total passengers' evacuation time while prioritizing equity-priority communities. Simulations on the San Francisco Bay Area transportation network indicate that the proposed framework achieves significant improvements in both evacuation efficiency and equitable service distribution compared to traditional rule-based and random strategies. These results highlight the potential of reinforcement learning to enhance system performance and urban resilience during emergency evacuations, offering a scalable solution for real-world applications in intelligent transportation systems.
Cooperative Cruising: Reinforcement Learning based Time-Headway Control for Increased Traffic Efficiency
Dec 03, 2024The proliferation of Connected Automated Vehicles represents an unprecedented opportunity for improving driving efficiency and alleviating traffic congestion. However, existing research fails to address realistic multi-lane highway scenarios without assuming connectivity, perception, and control capabilities that are typically unavailable in current vehicles. This paper proposes a novel AI system that is the first to improve highway traffic efficiency compared with human-like traffic in realistic, simulated multi-lane scenarios, while relying on existing connectivity, perception, and control capabilities. At the core of our approach is a reinforcement learning based controller that dynamically communicates time-headways to automated vehicles near bottlenecks based on real-time traffic conditions. These desired time-headways are then used by Adaptive Cruise Control (ACC) systems to adjust their following distance. By (i) integrating existing traffic estimation technology and low-bandwidth vehicle-to-infrastructure connectivity, (ii) leveraging safety-certified ACC systems, and (iii) targeting localized bottleneck challenges that can be addressed independently in different locations, we propose a practical, safe, and scalable system that can positively impact numerous road users.
Reinforcement Learning Based Oscillation Dampening: Scaling up Single-Agent RL algorithms to a 100 AV highway field operational test
Feb 26, 2024In this article, we explore the technical details of the reinforcement learning (RL) algorithms that were deployed in the largest field test of automated vehicles designed to smooth traffic flow in history as of 2023, uncovering the challenges and breakthroughs that come with developing RL controllers for automated vehicles. We delve into the fundamental concepts behind RL algorithms and their application in the context of self-driving cars, discussing the developmental process from simulation to deployment in detail, from designing simulators to reward function shaping. We present the results in both simulation and deployment, discussing the flow-smoothing benefits of the RL controller. From understanding the basics of Markov decision processes to exploring advanced techniques such as deep RL, our article offers a comprehensive overview and deep dive of the theoretical foundations and practical implementations driving this rapidly evolving field. We also showcase real-world case studies and alternative research projects that highlight the impact of RL controllers in revolutionizing autonomous driving. From tackling complex urban environments to dealing with unpredictable traffic scenarios, these intelligent controllers are pushing the boundaries of what automated vehicles can achieve. Furthermore, we examine the safety considerations and hardware-focused technical details surrounding deployment of RL controllers into automated vehicles. As these algorithms learn and evolve through interactions with the environment, ensuring their behavior aligns with safety standards becomes crucial. We explore the methodologies and frameworks being developed to address these challenges, emphasizing the importance of building reliable control systems for automated vehicles.
Mesoscale Traffic Forecasting for Real-Time Bottleneck and Shockwave Prediction
Feb 08, 2024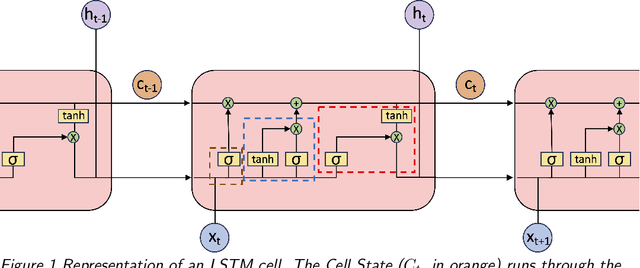
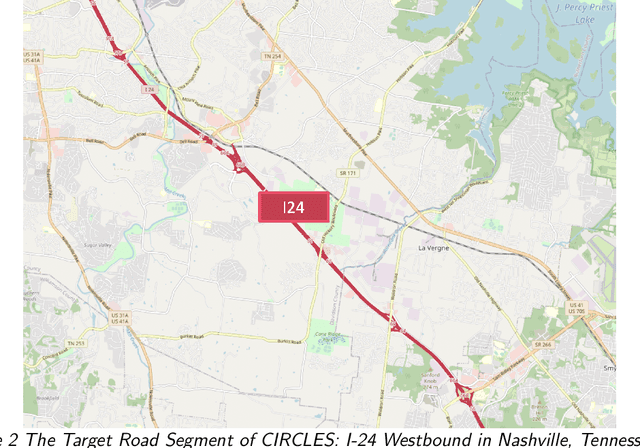
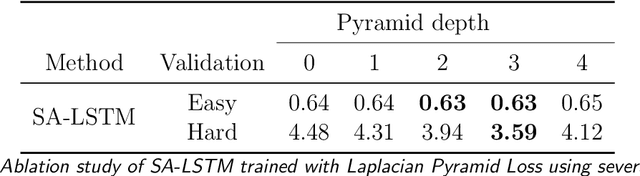
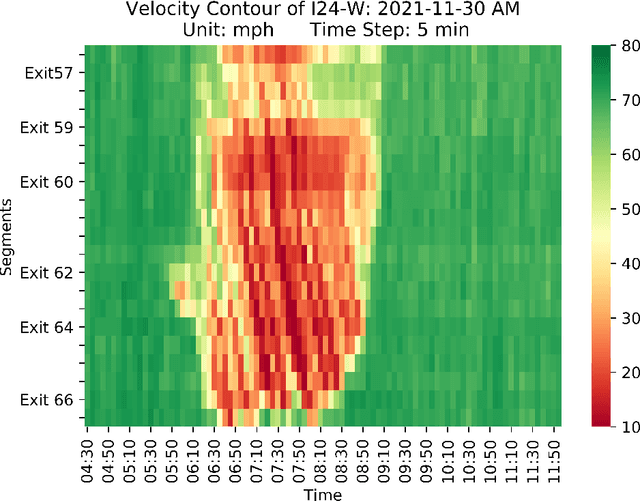
Accurate real-time traffic state forecasting plays a pivotal role in traffic control research. In particular, the CIRCLES consortium project necessitates predictive techniques to mitigate the impact of data source delays. After the success of the MegaVanderTest experiment, this paper aims at overcoming the current system limitations and develop a more suited approach to improve the real-time traffic state estimation for the next iterations of the experiment. In this paper, we introduce the SA-LSTM, a deep forecasting method integrating Self-Attention (SA) on the spatial dimension with Long Short-Term Memory (LSTM) yielding state-of-the-art results in real-time mesoscale traffic forecasting. We extend this approach to multi-step forecasting with the n-step SA-LSTM, which outperforms traditional multi-step forecasting methods in the trade-off between short-term and long-term predictions, all while operating in real-time.
Enabling Mixed Autonomy Traffic Control
Oct 28, 2023



We demonstrate a new capability of automated vehicles: mixed autonomy traffic control. With this new capability, automated vehicles can shape the traffic flows composed of other non-automated vehicles, which has the promise to improve safety, efficiency, and energy outcomes in transportation systems at a societal scale. Investigating mixed autonomy mobile traffic control must be done in situ given that the complex dynamics of other drivers and their response to a team of automated vehicles cannot be effectively modeled. This capability has been blocked because there is no existing scalable and affordable platform for experimental control. This paper introduces an extensible open-source hardware and software platform, enabling a team of 100 vehicles to execute several different vehicular control algorithms as a collaborative fleet, composed of three different makes and models, which drove 22752 miles in a combined 1022 hours, over 5 days in Nashville, TN in November 2022.
So you think you can track?
Sep 13, 2023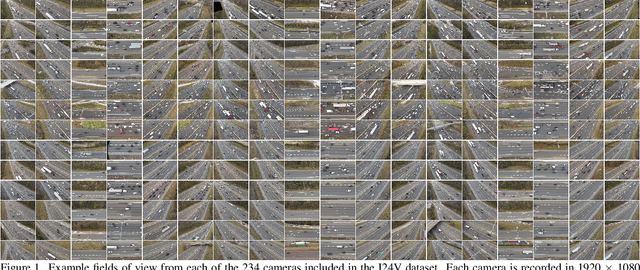
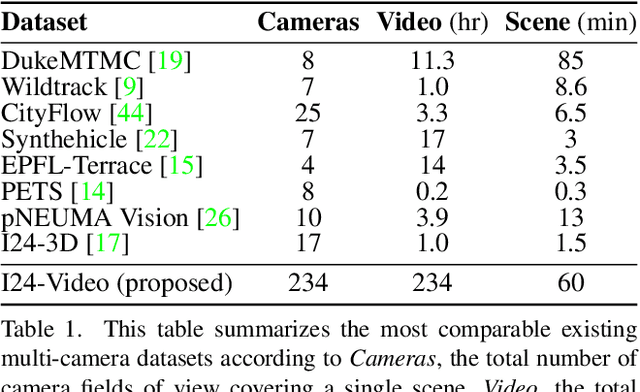
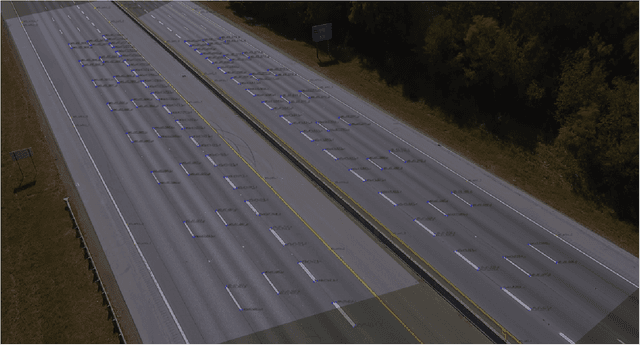
This work introduces a multi-camera tracking dataset consisting of 234 hours of video data recorded concurrently from 234 overlapping HD cameras covering a 4.2 mile stretch of 8-10 lane interstate highway near Nashville, TN. The video is recorded during a period of high traffic density with 500+ objects typically visible within the scene and typical object longevities of 3-15 minutes. GPS trajectories from 270 vehicle passes through the scene are manually corrected in the video data to provide a set of ground-truth trajectories for recall-oriented tracking metrics, and object detections are provided for each camera in the scene (159 million total before cross-camera fusion). Initial benchmarking of tracking-by-detection algorithms is performed against the GPS trajectories, and a best HOTA of only 9.5% is obtained (best recall 75.9% at IOU 0.1, 47.9 average IDs per ground truth object), indicating the benchmarked trackers do not perform sufficiently well at the long temporal and spatial durations required for traffic scene understanding.