 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCalibrating Adaptive Smoothing Methods for Freeway Traffic Reconstruction
Feb 02, 2026The adaptive smoothing method (ASM) is a widely used approach for traffic state reconstruction. This article presents a Python implementation of ASM, featuring end-to-end calibration using real-world ground truth data. The calibration is formulated as a parameterized kernel optimization problem. The model is calibrated using data from a full-state observation testbed, with input from a sparse radar sensor network. The implementation is developed in PyTorch, enabling integration with various deep learning methods. We evaluate the results in terms of speed distribution, spatio-temporal error distribution, and spatial error to provide benchmark metrics for the traffic reconstruction problem. We further demonstrate the usability of the calibrated method across multiple freeways. Finally, we discuss the challenges of reproducibility in general traffic model calibration and the limitations of ASM. This article is reproducible and can serve as a benchmark for various freeway operation tasks.
FT-AED: Benchmark Dataset for Early Freeway Traffic Anomalous Event Detection
Jun 24, 2024



Early and accurate detection of anomalous events on the freeway, such as accidents, can improve emergency response and clearance. However, existing delays and errors in event identification and reporting make it a difficult problem to solve. Current large-scale freeway traffic datasets are not designed for anomaly detection and ignore these challenges. In this paper, we introduce the first large-scale lane-level freeway traffic dataset for anomaly detection. Our dataset consists of a month of weekday radar detection sensor data collected in 4 lanes along an 18-mile stretch of Interstate 24 heading toward Nashville, TN, comprising over 3.7 million sensor measurements. We also collect official crash reports from the Nashville Traffic Management Center and manually label all other potential anomalies in the dataset. To show the potential for our dataset to be used in future machine learning and traffic research, we benchmark numerous deep learning anomaly detection models on our dataset. We find that unsupervised graph neural network autoencoders are a promising solution for this problem and that ignoring spatial relationships leads to decreased performance. We demonstrate that our methods can reduce reporting delays by over 10 minutes on average while detecting 75% of crashes. Our dataset and all preprocessing code needed to get started are publicly released at https://vu.edu/ft-aed/ to facilitate future research.
Virtual trajectories for I-24 MOTION: data and tools
Nov 17, 2023



This article introduces a new virtual trajectory dataset derived from the I-24 MOTION INCEPTION v1.0.0 dataset to address challenges in analyzing large but noisy trajectory datasets. Building on the concept of virtual trajectories, we provide a Python implementation to generate virtual trajectories from large raw datasets that are typically challenging to process due to their size. We demonstrate the practical utility of these trajectories in assessing speed variability and travel times across different lanes within the INCEPTION dataset. The virtual trajectory dataset opens future research on traffic waves and their impact on energy.
MARVEL: Multi-Agent Reinforcement-Learning for Large-Scale Variable Speed Limits
Oct 18, 2023



Variable speed limit (VSL) control is a promising traffic management strategy for enhancing safety and mobility. This work introduces MARVEL, a multi-agent reinforcement learning (MARL) framework for implementing large-scale VSL control on freeway corridors using only commonly available data. The agents learn through a reward structure that incorporates adaptability to traffic conditions, safety, and mobility; enabling coordination among the agents. The proposed framework scales to cover corridors with many gantries thanks to a parameter sharing among all VSL agents. The agents are trained in a microsimulation environment based on a short freeway stretch with 8 gantries spanning 7 miles and tested with 34 gantries spanning 17 miles of I-24 near Nashville, TN. MARVEL improves traffic safety by 63.4% compared to the no control scenario and enhances traffic mobility by 14.6% compared to a state-of-the-practice algorithm that has been deployed on I-24. An explainability analysis is undertaken to explore the learned policy under different traffic conditions and the results provide insights into the decision-making process of agents. Finally, we test the policy learned from the simulation-based experiments on real input data from I-24 to illustrate the potential deployment capability of the learned policy.
SAILing CAVs: Speed-Adaptive Infrastructure-Linked Connected and Automated Vehicles
Oct 10, 2023
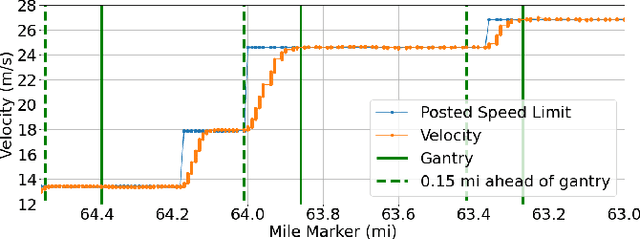
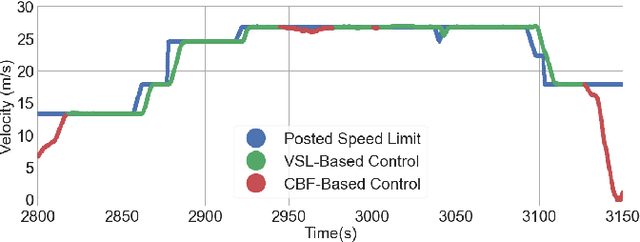
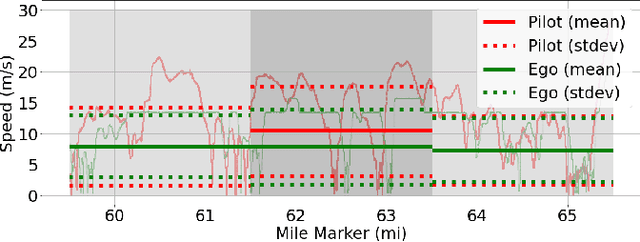
This work demonstrates a new capability in roadway control: Speed-adaptive, infrastructure-linked connected and automated vehicles. We develop and deploy a lightly modified vehicle that is able to dynamically adjust the vehicle speed in response to posted variable speed limit messages generated by the infrastructure using LTE connectivity. This work describes the open source hardware and software platform that enables integration between infrastructure-based variable posted speed limits, and existing vehicle platforms for automated control. The vehicle is deployed in heavy morning traffic on I-24 in Nashville, TN. The control vehicle follows the posted variable speed limits, resulting in as much as a 25% reduction in speed variability compared to a human-piloted vehicle in the same traffic stream.
So you think you can track?
Sep 13, 2023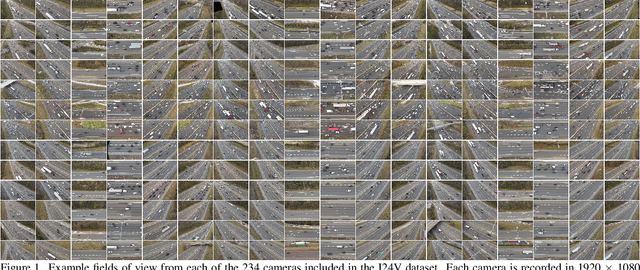
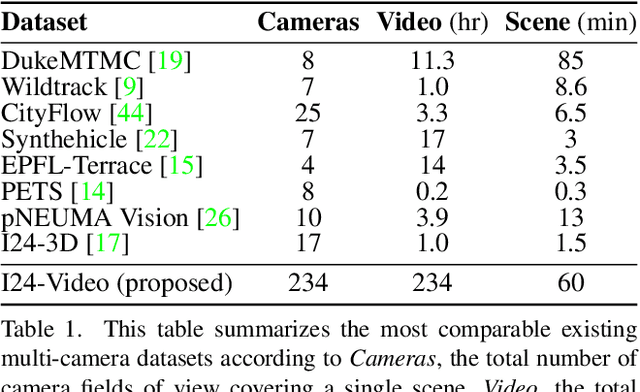
This work introduces a multi-camera tracking dataset consisting of 234 hours of video data recorded concurrently from 234 overlapping HD cameras covering a 4.2 mile stretch of 8-10 lane interstate highway near Nashville, TN. The video is recorded during a period of high traffic density with 500+ objects typically visible within the scene and typical object longevities of 3-15 minutes. GPS trajectories from 270 vehicle passes through the scene are manually corrected in the video data to provide a set of ground-truth trajectories for recall-oriented tracking metrics, and object detections are provided for each camera in the scene (159 million total before cross-camera fusion). Initial benchmarking of tracking-by-detection algorithms is performed against the GPS trajectories, and a best HOTA of only 9.5% is obtained (best recall 75.9% at IOU 0.1, 47.9 average IDs per ground truth object), indicating the benchmarked trackers do not perform sufficiently well at the long temporal and spatial durations required for traffic scene understanding.
The Interstate-24 3D Dataset: a new benchmark for 3D multi-camera vehicle tracking
Aug 28, 2023



This work presents a novel video dataset recorded from overlapping highway traffic cameras along an urban interstate, enabling multi-camera 3D object tracking in a traffic monitoring context. Data is released from 3 scenes containing video from at least 16 cameras each, totaling 57 minutes in length. 877,000 3D bounding boxes and corresponding object tracklets are fully and accurately annotated for each camera field of view and are combined into a spatially and temporally continuous set of vehicle trajectories for each scene. Lastly, existing algorithms are combined to benchmark a number of 3D multi-camera tracking pipelines on the dataset, with results indicating that the dataset is challenging due to the difficulty of matching objects traveling at high speeds across cameras and heavy object occlusion, potentially for hundreds of frames, during congested traffic. This work aims to enable the development of accurate and automatic vehicle trajectory extraction algorithms, which will play a vital role in understanding impacts of autonomous vehicle technologies on the safety and efficiency of traffic.
Automatic vehicle trajectory data reconstruction at scale
Dec 15, 2022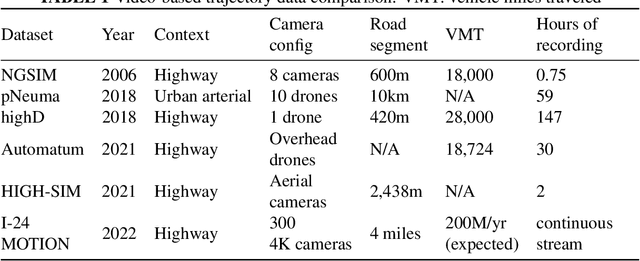
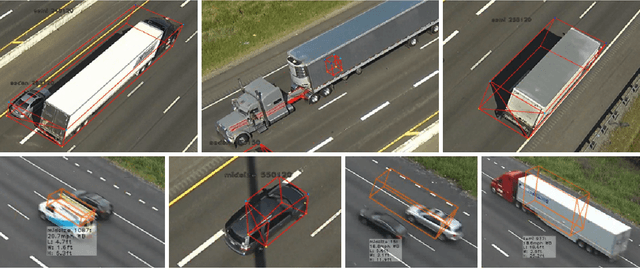
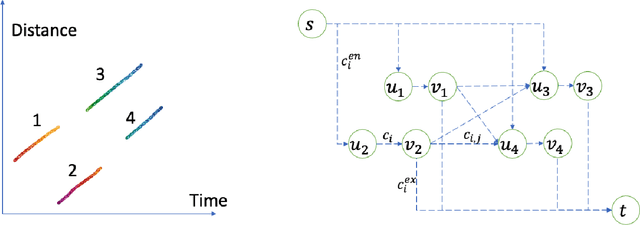
Vehicle trajectory data has received increasing research attention over the past decades. With the technological sensing improvements such as high-resolution video cameras, in-vehicle radars and lidars, abundant individual and contextual traffic data is now available. However, though the data quantity is massive, it is by itself of limited utility for traffic research because of noise and systematic sensing errors, thus necessitates proper processing to ensure data quality. We draw particular attention to extracting high-resolution vehicle trajectory data from video cameras as traffic monitoring cameras are becoming increasingly ubiquitous. We explore methods for automatic trajectory data reconciliation, given "raw" vehicle detection and tracking information from automatic video processing algorithms. We propose a pipeline including a) an online data association algorithm to match fragments that are associated to the same object (vehicle), which is formulated as a min-cost network flow problem of a graph, and b) a trajectory reconciliation method formulated as a quadratic program to enhance raw detection data. The pipeline leverages vehicle dynamics and physical constraints to associate tracked objects when they become fragmented, remove measurement noise on trajectories and impute missing data due to fragmentations. The accuracy is benchmarked on a sample of manually-labeled data, which shows that the reconciled trajectories improve the accuracy on all the tested input data for a wide range of measures. An online version of the reconciliation pipeline is implemented and will be applied in a continuous video processing system running on a camera network covering a 4-mile stretch of Interstate-24 near Nashville, Tennessee.