 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMARVEL: Multi-Agent Reinforcement-Learning for Large-Scale Variable Speed Limits
Oct 18, 2023



Variable speed limit (VSL) control is a promising traffic management strategy for enhancing safety and mobility. This work introduces MARVEL, a multi-agent reinforcement learning (MARL) framework for implementing large-scale VSL control on freeway corridors using only commonly available data. The agents learn through a reward structure that incorporates adaptability to traffic conditions, safety, and mobility; enabling coordination among the agents. The proposed framework scales to cover corridors with many gantries thanks to a parameter sharing among all VSL agents. The agents are trained in a microsimulation environment based on a short freeway stretch with 8 gantries spanning 7 miles and tested with 34 gantries spanning 17 miles of I-24 near Nashville, TN. MARVEL improves traffic safety by 63.4% compared to the no control scenario and enhances traffic mobility by 14.6% compared to a state-of-the-practice algorithm that has been deployed on I-24. An explainability analysis is undertaken to explore the learned policy under different traffic conditions and the results provide insights into the decision-making process of agents. Finally, we test the policy learned from the simulation-based experiments on real input data from I-24 to illustrate the potential deployment capability of the learned policy.
Detecting Socially Abnormal Highway Driving Behaviors via Recurrent Graph Attention Networks
Apr 23, 2023



With the rapid development of Internet of Things technologies, the next generation traffic monitoring infrastructures are connected via the web, to aid traffic data collection and intelligent traffic management. One of the most important tasks in traffic is anomaly detection, since abnormal drivers can reduce traffic efficiency and cause safety issues. This work focuses on detecting abnormal driving behaviors from trajectories produced by highway video surveillance systems. Most of the current abnormal driving behavior detection methods focus on a limited category of abnormal behaviors that deal with a single vehicle without considering vehicular interactions. In this work, we consider the problem of detecting a variety of socially abnormal driving behaviors, i.e., behaviors that do not conform to the behavior of other nearby drivers. This task is complicated by the variety of vehicular interactions and the spatial-temporal varying nature of highway traffic. To solve this problem, we propose an autoencoder with a Recurrent Graph Attention Network that can capture the highway driving behaviors contextualized on the surrounding cars, and detect anomalies that deviate from learned patterns. Our model is scalable to large freeways with thousands of cars. Experiments on data generated from traffic simulation software show that our model is the only one that can spot the exact vehicle conducting socially abnormal behaviors, among the state-of-the-art anomaly detection models. We further show the performance on real world HighD traffic dataset, where our model detects vehicles that violate the local driving norms.
Automatic vehicle trajectory data reconstruction at scale
Dec 15, 2022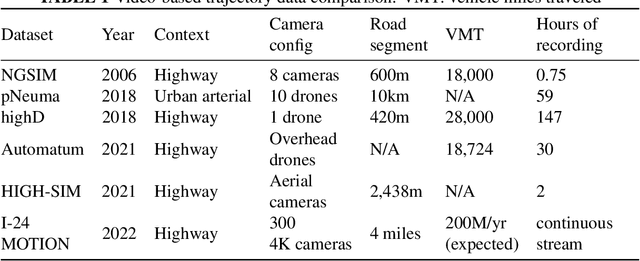
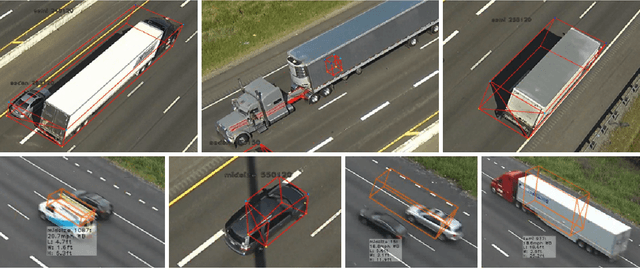
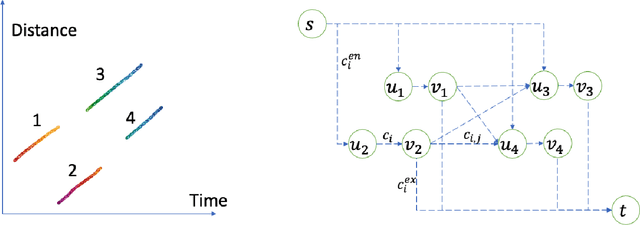
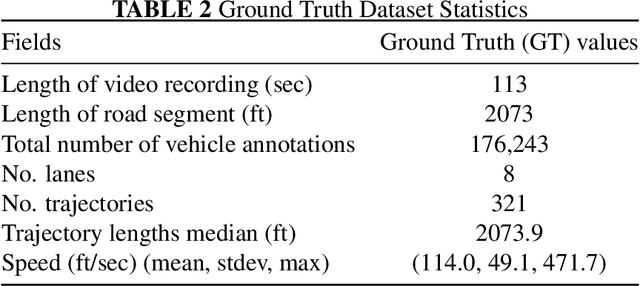
Vehicle trajectory data has received increasing research attention over the past decades. With the technological sensing improvements such as high-resolution video cameras, in-vehicle radars and lidars, abundant individual and contextual traffic data is now available. However, though the data quantity is massive, it is by itself of limited utility for traffic research because of noise and systematic sensing errors, thus necessitates proper processing to ensure data quality. We draw particular attention to extracting high-resolution vehicle trajectory data from video cameras as traffic monitoring cameras are becoming increasingly ubiquitous. We explore methods for automatic trajectory data reconciliation, given "raw" vehicle detection and tracking information from automatic video processing algorithms. We propose a pipeline including a) an online data association algorithm to match fragments that are associated to the same object (vehicle), which is formulated as a min-cost network flow problem of a graph, and b) a trajectory reconciliation method formulated as a quadratic program to enhance raw detection data. The pipeline leverages vehicle dynamics and physical constraints to associate tracked objects when they become fragmented, remove measurement noise on trajectories and impute missing data due to fragmentations. The accuracy is benchmarked on a sample of manually-labeled data, which shows that the reconciled trajectories improve the accuracy on all the tested input data for a wide range of measures. An online version of the reconciliation pipeline is implemented and will be applied in a continuous video processing system running on a camera network covering a 4-mile stretch of Interstate-24 near Nashville, Tennessee.