 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Root Cause Analysis System for Complex Data Products
Dec 19, 2024



We present ARCAS (Automated Root Cause Analysis System), a diagnostic platform based on a Domain Specific Language (DSL) built for fast diagnostic implementation and low learning curve. Arcas is composed of a constellation of automated troubleshooting guides (Auto-TSGs) that can execute in parallel to detect issues using product telemetry and apply mitigation in near-real-time. The DSL is tailored specifically to ensure that subject matter experts can deliver highly curated and relevant Auto-TSGs in a short time without having to understand how they will interact with the rest of the diagnostic platform, thus reducing time-to-mitigate and saving crucial engineering cycles when they matter most. This contrasts with platforms like Datadog and New Relic, which primarily focus on monitoring and require manual intervention for mitigation. ARCAS uses a Large Language Model (LLM) to prioritize Auto-TSGs outputs and take appropriate actions, thus suppressing the costly requirement of understanding the general behavior of the system. We explain the key concepts behind ARCAS and demonstrate how it has been successfully used for multiple products across Azure Synapse Analytics and Microsoft Fabric Synapse Data Warehouse.
Automatic vehicle trajectory data reconstruction at scale
Dec 15, 2022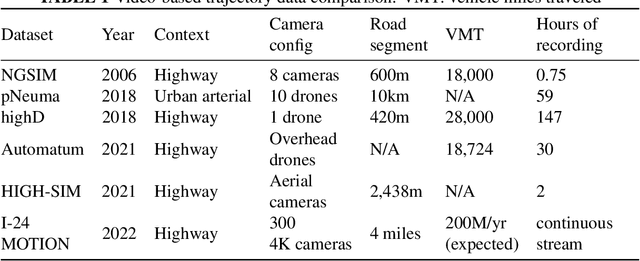
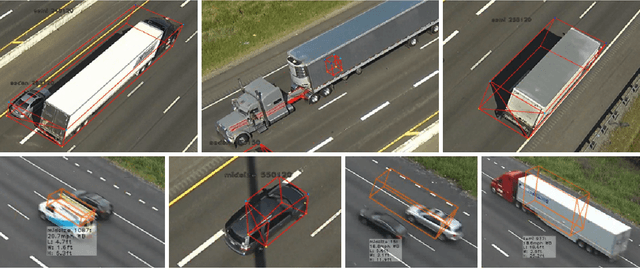
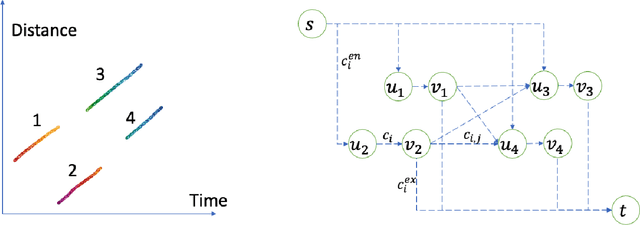
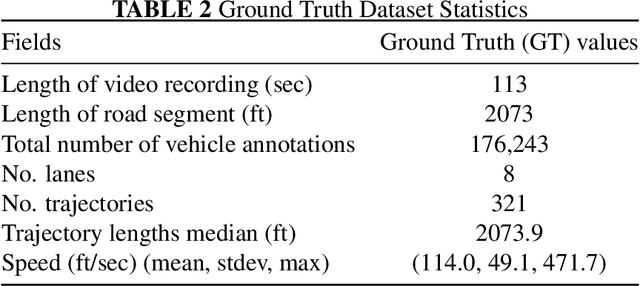
Vehicle trajectory data has received increasing research attention over the past decades. With the technological sensing improvements such as high-resolution video cameras, in-vehicle radars and lidars, abundant individual and contextual traffic data is now available. However, though the data quantity is massive, it is by itself of limited utility for traffic research because of noise and systematic sensing errors, thus necessitates proper processing to ensure data quality. We draw particular attention to extracting high-resolution vehicle trajectory data from video cameras as traffic monitoring cameras are becoming increasingly ubiquitous. We explore methods for automatic trajectory data reconciliation, given "raw" vehicle detection and tracking information from automatic video processing algorithms. We propose a pipeline including a) an online data association algorithm to match fragments that are associated to the same object (vehicle), which is formulated as a min-cost network flow problem of a graph, and b) a trajectory reconciliation method formulated as a quadratic program to enhance raw detection data. The pipeline leverages vehicle dynamics and physical constraints to associate tracked objects when they become fragmented, remove measurement noise on trajectories and impute missing data due to fragmentations. The accuracy is benchmarked on a sample of manually-labeled data, which shows that the reconciled trajectories improve the accuracy on all the tested input data for a wide range of measures. An online version of the reconciliation pipeline is implemented and will be applied in a continuous video processing system running on a camera network covering a 4-mile stretch of Interstate-24 near Nashville, Tennessee.