 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnabling Mixed Autonomy Traffic Control
Oct 28, 2023



We demonstrate a new capability of automated vehicles: mixed autonomy traffic control. With this new capability, automated vehicles can shape the traffic flows composed of other non-automated vehicles, which has the promise to improve safety, efficiency, and energy outcomes in transportation systems at a societal scale. Investigating mixed autonomy mobile traffic control must be done in situ given that the complex dynamics of other drivers and their response to a team of automated vehicles cannot be effectively modeled. This capability has been blocked because there is no existing scalable and affordable platform for experimental control. This paper introduces an extensible open-source hardware and software platform, enabling a team of 100 vehicles to execute several different vehicular control algorithms as a collaborative fleet, composed of three different makes and models, which drove 22752 miles in a combined 1022 hours, over 5 days in Nashville, TN in November 2022.
So you think you can track?
Sep 13, 2023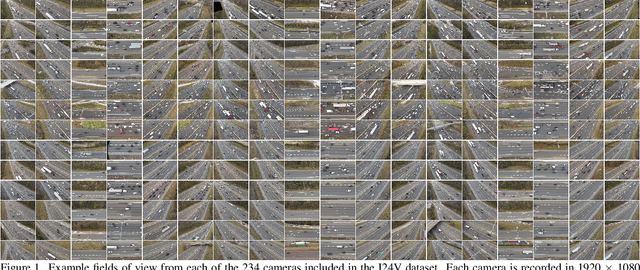
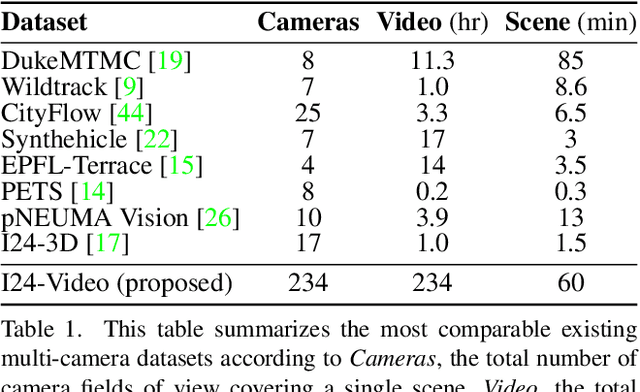
This work introduces a multi-camera tracking dataset consisting of 234 hours of video data recorded concurrently from 234 overlapping HD cameras covering a 4.2 mile stretch of 8-10 lane interstate highway near Nashville, TN. The video is recorded during a period of high traffic density with 500+ objects typically visible within the scene and typical object longevities of 3-15 minutes. GPS trajectories from 270 vehicle passes through the scene are manually corrected in the video data to provide a set of ground-truth trajectories for recall-oriented tracking metrics, and object detections are provided for each camera in the scene (159 million total before cross-camera fusion). Initial benchmarking of tracking-by-detection algorithms is performed against the GPS trajectories, and a best HOTA of only 9.5% is obtained (best recall 75.9% at IOU 0.1, 47.9 average IDs per ground truth object), indicating the benchmarked trackers do not perform sufficiently well at the long temporal and spatial durations required for traffic scene understanding.