 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Middle Way to Traffic Enlightenment
Jan 29, 2024



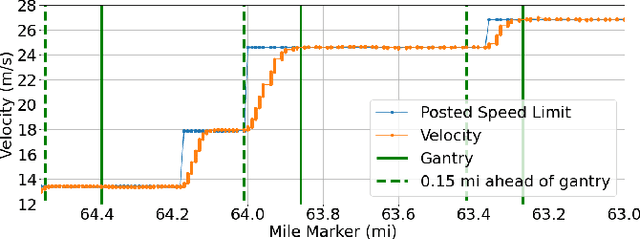
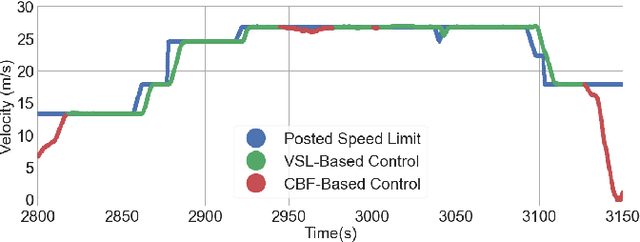
This paper introduces a novel approach that seeks a middle ground for traffic control in multi-lane congestion, where prevailing traffic speeds are too fast, and speed recommendations designed to dampen traffic waves are too slow. Advanced controllers that modify the speed of an automated car for wave-dampening, eco-driving, or other goals, typically are designed with forward collision safety in mind. Our approach goes further, by considering how dangerous it can be for a controller to drive so slowly relative to prevailing traffic that it creates a significant issue for safety and comfort. This paper explores open-road scenarios where large gaps between prevailing speeds and desired speeds can exist, specifically when infrastructure-based variable speed limit systems are not strictly followed at all times by other drivers. Our designed, implemented, and deployed algorithm is able to follow variable speed limits when others also follow it, avoid collisions with vehicles ahead, and adapt to prevailing traffic when other motorists are traveling well above the posted speeds. The key is to reject unsafe speed recommendations from infrastructure-based traffic smoothing systems, based on real-time local traffic conditions observed by the vehicle under control. This solution is implemented and deployed on two control vehicles in heavy multi-lane highway congestion. The results include analysis from system design, and field tests that validate the system's performance using an existing Variable Speed Limit system as the external source for speed recommendations, and the on-board sensors of a stock Toyota Rav4 for inputs that estimate the prevailing speed of traffic around the vehicle under control.
Enabling Mixed Autonomy Traffic Control
Oct 28, 2023



We demonstrate a new capability of automated vehicles: mixed autonomy traffic control. With this new capability, automated vehicles can shape the traffic flows composed of other non-automated vehicles, which has the promise to improve safety, efficiency, and energy outcomes in transportation systems at a societal scale. Investigating mixed autonomy mobile traffic control must be done in situ given that the complex dynamics of other drivers and their response to a team of automated vehicles cannot be effectively modeled. This capability has been blocked because there is no existing scalable and affordable platform for experimental control. This paper introduces an extensible open-source hardware and software platform, enabling a team of 100 vehicles to execute several different vehicular control algorithms as a collaborative fleet, composed of three different makes and models, which drove 22752 miles in a combined 1022 hours, over 5 days in Nashville, TN in November 2022.
SAILing CAVs: Speed-Adaptive Infrastructure-Linked Connected and Automated Vehicles
Oct 10, 2023
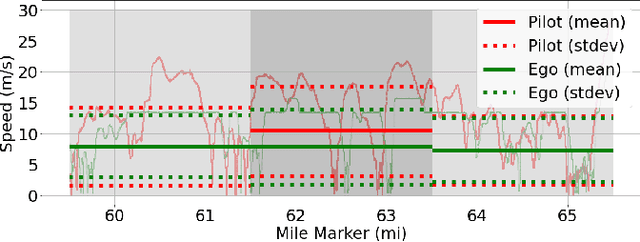
This work demonstrates a new capability in roadway control: Speed-adaptive, infrastructure-linked connected and automated vehicles. We develop and deploy a lightly modified vehicle that is able to dynamically adjust the vehicle speed in response to posted variable speed limit messages generated by the infrastructure using LTE connectivity. This work describes the open source hardware and software platform that enables integration between infrastructure-based variable posted speed limits, and existing vehicle platforms for automated control. The vehicle is deployed in heavy morning traffic on I-24 in Nashville, TN. The control vehicle follows the posted variable speed limits, resulting in as much as a 25% reduction in speed variability compared to a human-piloted vehicle in the same traffic stream.
Streaming data preprocessing via online tensor recovery for large environmental sensor networks
Sep 01, 2021
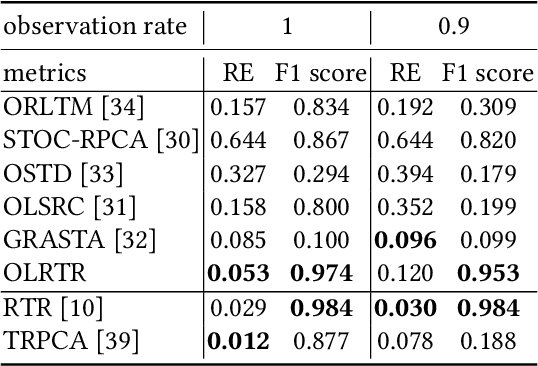

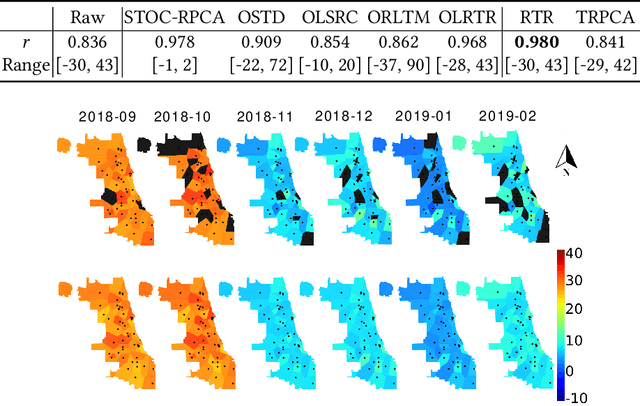
Measuring the built and natural environment at a fine-grained scale is now possible with low-cost urban environmental sensor networks. However, fine-grained city-scale data analysis is complicated by tedious data cleaning including removing outliers and imputing missing data. While many methods exist to automatically correct anomalies and impute missing entries, challenges still exist on data with large spatial-temporal scales and shifting patterns. To address these challenges, we propose an online robust tensor recovery (OLRTR) method to preprocess streaming high-dimensional urban environmental datasets. A small-sized dictionary that captures the underlying patterns of the data is computed and constantly updated with new data. OLRTR enables online recovery for large-scale sensor networks that provide continuous data streams, with a lower computational memory usage compared to offline batch counterparts. In addition, we formulate the objective function so that OLRTR can detect structured outliers, such as faulty readings over a long period of time. We validate OLRTR on a synthetically degraded National Oceanic and Atmospheric Administration temperature dataset, with a recovery error of 0.05, and apply it to the Array of Things city-scale sensor network in Chicago, IL, showing superior results compared with several established online and batch-based low rank decomposition methods.
Graph Convolutional Networks for traffic anomaly
Dec 25, 2020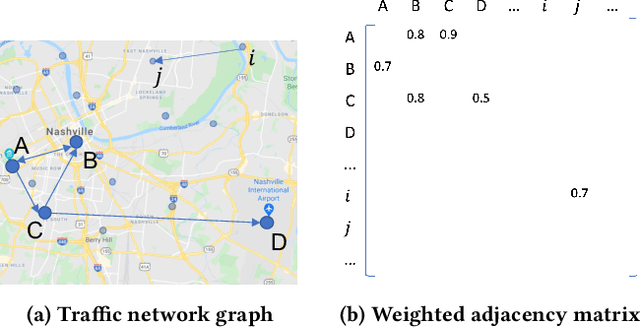

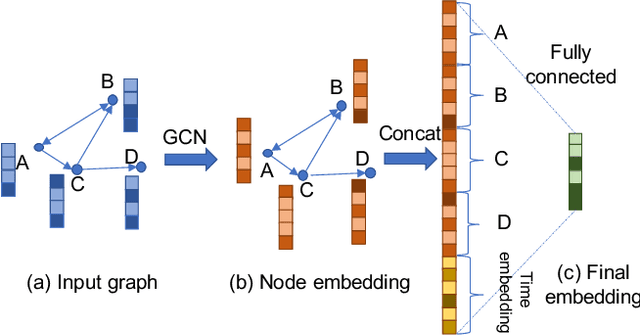
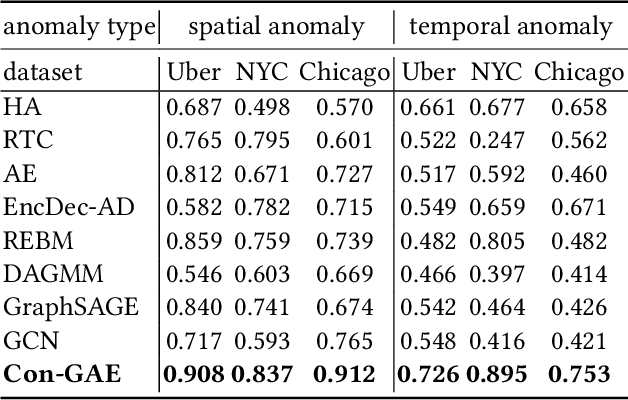
Event detection has been an important task in transportation, whose task is to detect points in time when large events disrupts a large portion of the urban traffic network. Travel information {Origin-Destination} (OD) matrix data by map service vendors has large potential to give us insights to discover historic patterns and distinguish anomalies. However, to fully capture the spatial and temporal traffic patterns remains a challenge, yet serves a crucial role for effective anomaly detection. Meanwhile, existing anomaly detection methods have not well-addressed the extreme data sparsity and high-dimension challenges, which are common in OD matrix datasets. To tackle these challenges, we formulate the problem in a novel way, as detecting anomalies in a set of directed weighted graphs representing the traffic conditions at each time interval. We further propose \textit{Context augmented Graph Autoencoder} (\textbf{Con-GAE }), that leverages graph embedding and context embedding techniques to capture the spatial traffic network patterns while working around the data sparsity and high-dimensionality issue. Con-GAE adopts an autoencoder framework and detect anomalies via semi-supervised learning. Extensive experiments show that our method can achieve up can achieve a 0.1-0.4 improvements of the area under the curve (AUC) score over state-of-art anomaly detection baselines, when applied on several real-world large scale OD matrix datasets.
Robust Tensor Recovery with Fiber Outliers for Traffic Events
Aug 27, 2019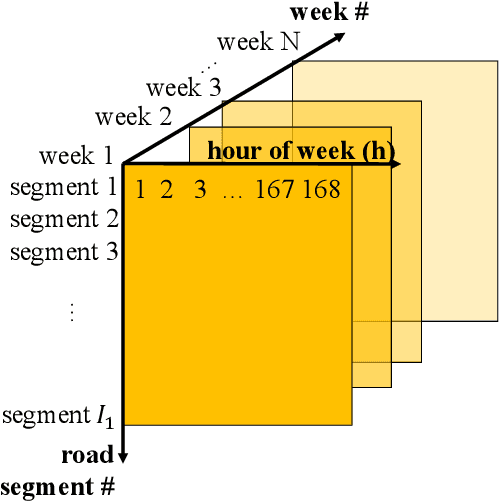
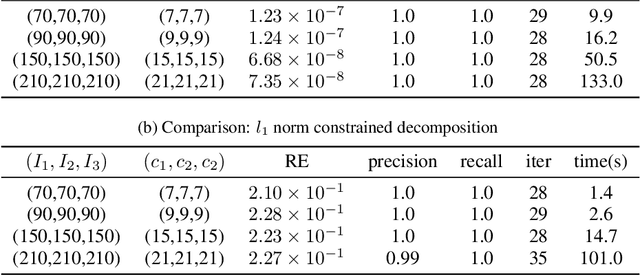
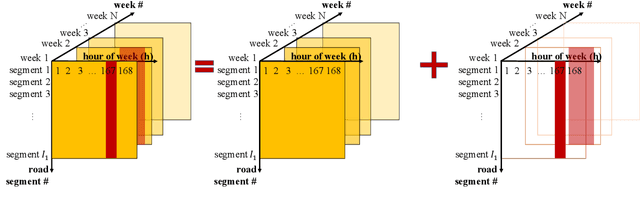
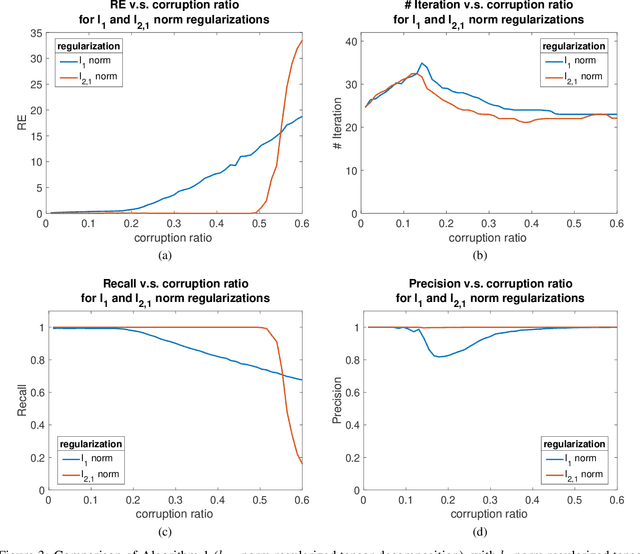
Event detection is gaining increasing attention in smart cities research. Large-scale mobility data serves as an important tool to uncover the dynamics of urban transportation systems, and more often than not the dataset is incomplete. In this article, we develop a method to detect extreme events in large traffic datasets, and to impute missing data during regular conditions. Specifically, we propose a robust tensor recovery problem to recover low rank tensors under fiber-sparse corruptions with partial observations, and use it to identify events, and impute missing data under typical conditions. Our approach is scalable to large urban areas, taking full advantage of the spatio-temporal correlations in traffic patterns. We develop an efficient algorithm to solve the tensor recovery problem based on the alternating direction method of multipliers (ADMM) framework. Compared with existing $l_1$ norm regularized tensor decomposition methods, our algorithm can exactly recover the values of uncorrupted fibers of a low rank tensor and find the positions of corrupted fibers under mild conditions. Numerical experiments illustrate that our algorithm can exactly detect outliers even with missing data rates as high as 40%, conditioned on the outlier corruption rate and the Tucker rank of the low rank tensor. Finally, we apply our method on a real traffic dataset corresponding to downtown Nashville, TN, USA and successfully detect the events like severe car crashes, construction lane closures, and other large events that cause significant traffic disruptions.