 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Cruising: Reinforcement Learning based Time-Headway Control for Increased Traffic Efficiency
Dec 03, 2024The proliferation of Connected Automated Vehicles represents an unprecedented opportunity for improving driving efficiency and alleviating traffic congestion. However, existing research fails to address realistic multi-lane highway scenarios without assuming connectivity, perception, and control capabilities that are typically unavailable in current vehicles. This paper proposes a novel AI system that is the first to improve highway traffic efficiency compared with human-like traffic in realistic, simulated multi-lane scenarios, while relying on existing connectivity, perception, and control capabilities. At the core of our approach is a reinforcement learning based controller that dynamically communicates time-headways to automated vehicles near bottlenecks based on real-time traffic conditions. These desired time-headways are then used by Adaptive Cruise Control (ACC) systems to adjust their following distance. By (i) integrating existing traffic estimation technology and low-bandwidth vehicle-to-infrastructure connectivity, (ii) leveraging safety-certified ACC systems, and (iii) targeting localized bottleneck challenges that can be addressed independently in different locations, we propose a practical, safe, and scalable system that can positively impact numerous road users.
Learning a Robust Multiagent Driving Policy for Traffic Congestion Reduction
Dec 03, 2021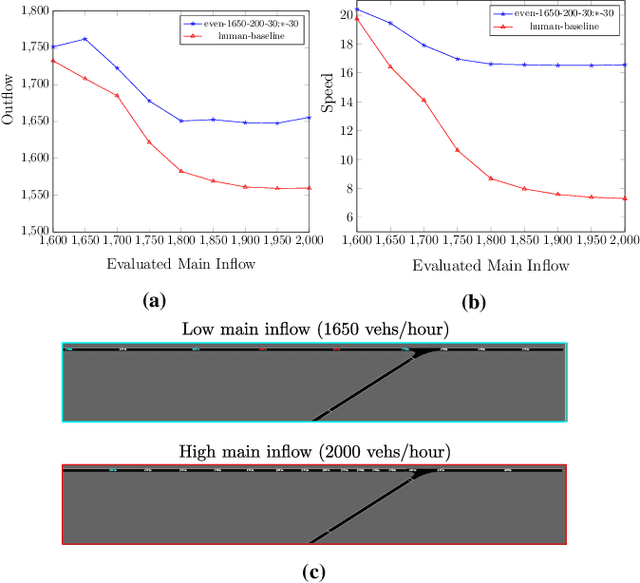
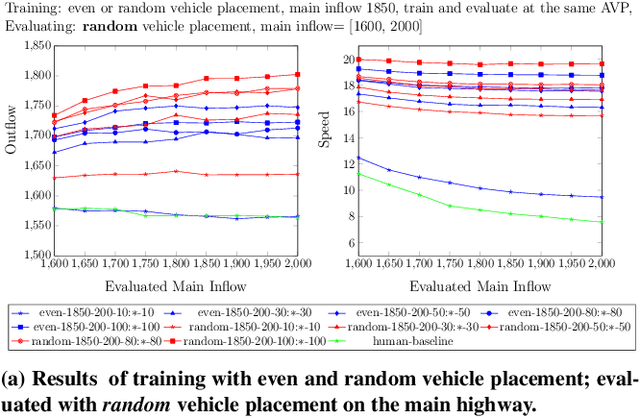
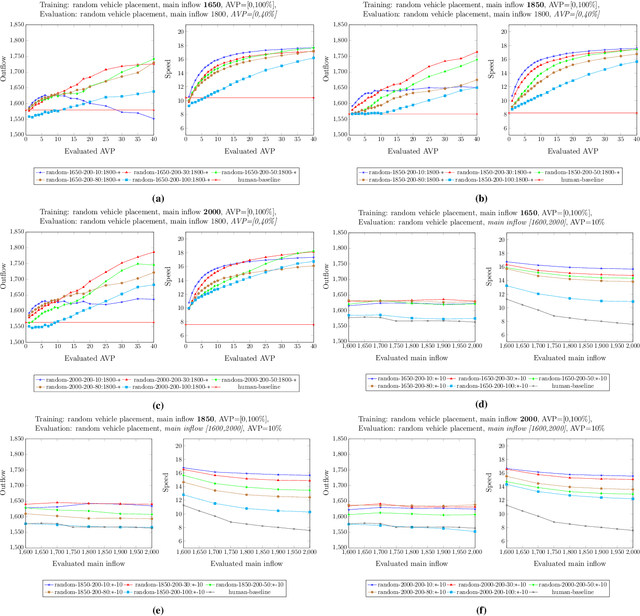
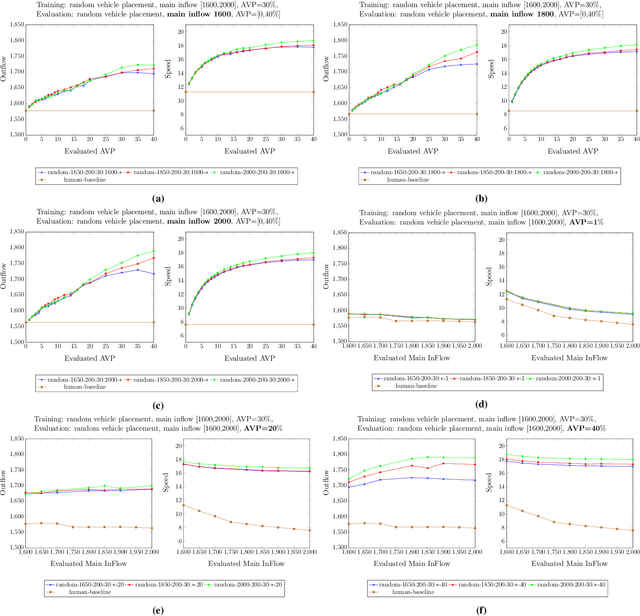
The advent of automated and autonomous vehicles (AVs) creates opportunities to achieve system-level goals using multiple AVs, such as traffic congestion reduction. Past research has shown that multiagent congestion-reducing driving policies can be learned in a variety of simulated scenarios. While initial proofs of concept were in small, closed traffic networks with a centralized controller, recently successful results have been demonstrated in more realistic settings with distributed control policies operating in open road networks where vehicles enter and leave. However, these driving policies were mostly tested under the same conditions they were trained on, and have not been thoroughly tested for robustness to different traffic conditions, which is a critical requirement in real-world scenarios. This paper presents a learned multiagent driving policy that is robust to a variety of open-network traffic conditions, including vehicle flows, the fraction of AVs in traffic, AV placement, and different merging road geometries. A thorough empirical analysis investigates the sensitivity of such a policy to the amount of AVs in both a simple merge network and a more complex road with two merging ramps. It shows that the learned policy achieves significant improvement over simulated human-driven policies even with AV penetration as low as 2%. The same policy is also shown to be capable of reducing traffic congestion in more complex roads with two merging ramps.