 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModular Framework for Uncertainty Prediction in Autonomous Vehicle Motion Forecasting within Complex Traffic Scenarios
Jan 27, 2025



We propose a modular modeling framework designed to enhance the capture and validation of uncertainty in autonomous vehicle (AV) trajectory prediction. Departing from traditional deterministic methods, our approach employs a flexible, end-to-end differentiable probabilistic encoder-decoder architecture. This modular design allows the encoder and decoder to be trained independently, enabling seamless adaptation to diverse traffic scenarios without retraining the entire system. Our key contributions include: (1) a probabilistic heatmap predictor that generates context-aware occupancy grids for dynamic forecasting, (2) a modular training approach that supports independent component training and flexible adaptation, and (3) a structured validation scheme leveraging uncertainty metrics to evaluate robustness under high-risk conditions. To highlight the benefits of our framework, we benchmark it against an end-to-end baseline, demonstrating faster convergence, improved stability, and flexibility. Experimental results validate these advantages, showcasing the capacity of the framework to efficiently handle complex scenarios while ensuring reliable predictions and robust uncertainty representation. This modular design offers significant practical utility and scalability for real-world autonomous driving applications.
Modeling and mitigation of occupational safety risks in dynamic industrial environments
May 02, 2022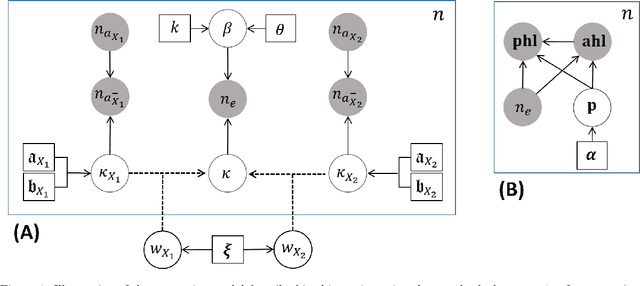

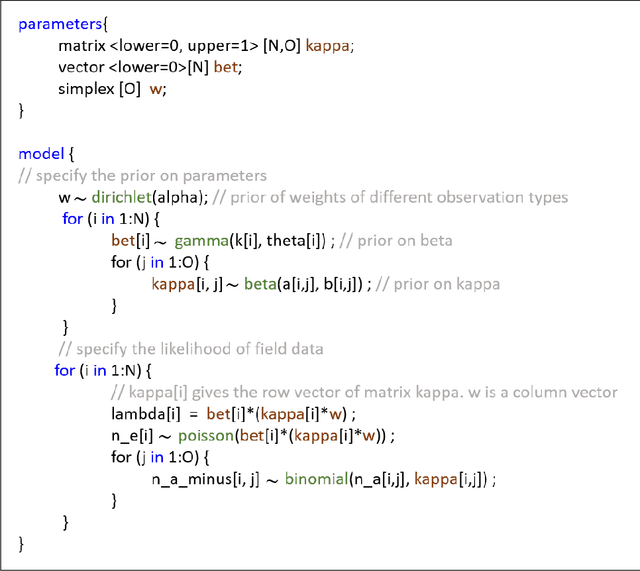
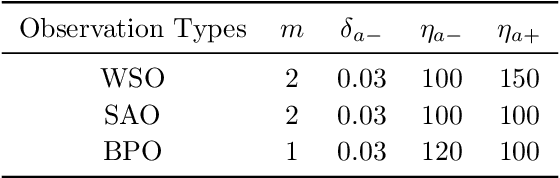
Identifying and mitigating safety risks is paramount in a number of industries. In addition to guidelines and best practices, many industries already have safety management systems (SMSs) designed to monitor and reinforce good safety behaviors. The analytic capabilities to analyze the data acquired through such systems, however, are still lacking in terms of their ability to robustly quantify risks posed by various occupational hazards. Moreover, best practices and modern SMSs are unable to account for dynamically evolving environments/behavioral characteristics commonly found in many industrial settings. This article proposes a method to address these issues by enabling continuous and quantitative assessment of safety risks in a data-driven manner. The backbone of our method is an intuitive hierarchical probabilistic model that explains sparse and noisy safety data collected by a typical SMS. A fully Bayesian approach is developed to calibrate this model from safety data in an online fashion. Thereafter, the calibrated model holds necessary information that serves to characterize risk posed by different safety hazards. Additionally, the proposed model can be leveraged for automated decision making, for instance solving resource allocation problems -- targeted towards risk mitigation -- that are often encountered in resource-constrained industrial environments. The methodology is rigorously validated on a simulated test-bed and its scalability is demonstrated on real data from large maintenance projects at a petrochemical plant.
Inferring Microbial Biomass Yield and Cell Weight using Probabilistic Macrochemical Modeling
Oct 06, 2020



Growth rates and biomass yields are key descriptors used in microbiology studies to understand how microbial species respond to changes in the environment. Of these, biomass yield estimates are typically obtained using cell counts and measurements of the feed substrate. These quantities are perturbed with measurement noise however. Perhaps most crucially, estimating biomass from cell counts, as needed to assess yields, relies on an assumed cell weight. Noise and discrepancies on these assumptions can lead to significant changes in conclusions regarding a microbes' response. This article proposes a methodology to address these challenges using probabilistic macrochemical models of microbial growth. It is shown that a model can be developed to fully use the experimental data, greatly relax the assumptions on the cell weight, and provides uncertainty estimates of key parameters. These capabilities are demonstrated and validated herein using several case studies with synthetically generated microbial growth data.
Advancing from Predictive Maintenance to Intelligent Maintenance with AI and IIoT
Sep 01, 2020
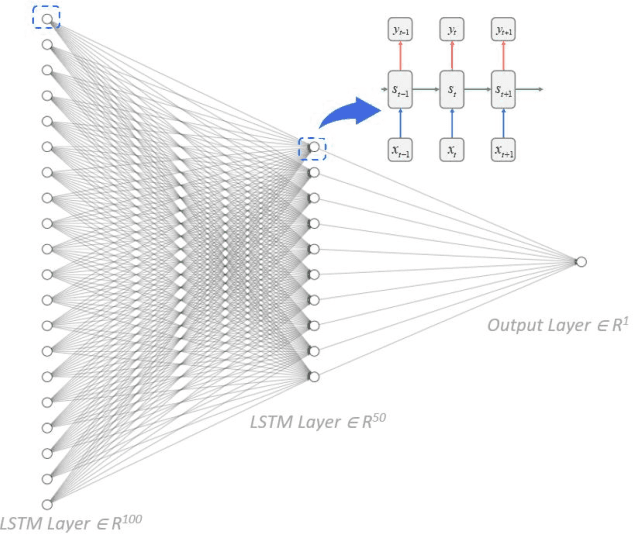
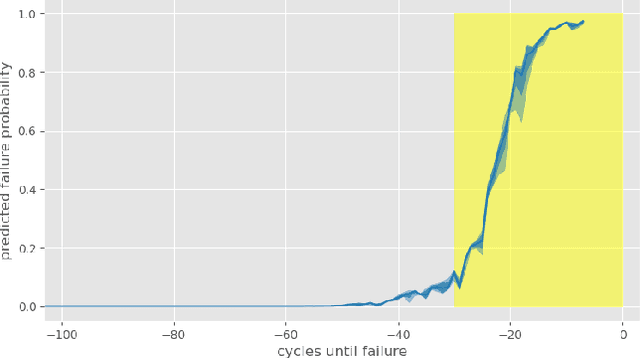

As Artificial Intelligent (AI) technology advances and increasingly large amounts of data become readily available via various Industrial Internet of Things (IIoT) projects, we evaluate the state of the art of predictive maintenance approaches and propose our innovative framework to improve the current practice. The paper first reviews the evolution of reliability modelling technology in the past 90 years and discusses major technologies developed in industry and academia. We then introduce the next generation maintenance framework - Intelligent Maintenance, and discuss its key components. This AI and IIoT based Intelligent Maintenance framework is composed of (1) latest machine learning algorithms including probabilistic reliability modelling with deep learning, (2) real-time data collection, transfer, and storage through wireless smart sensors, (3) Big Data technologies, (4) continuously integration and deployment of machine learning models, (5) mobile device and AR/VR applications for fast and better decision-making in the field. Particularly, we proposed a novel probabilistic deep learning reliability modelling approach and demonstrate it in the Turbofan Engine Degradation Dataset.