 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Tactile Sensing Foot for Single Robot Leg Stabilization
Paper and Code
Mar 26, 2021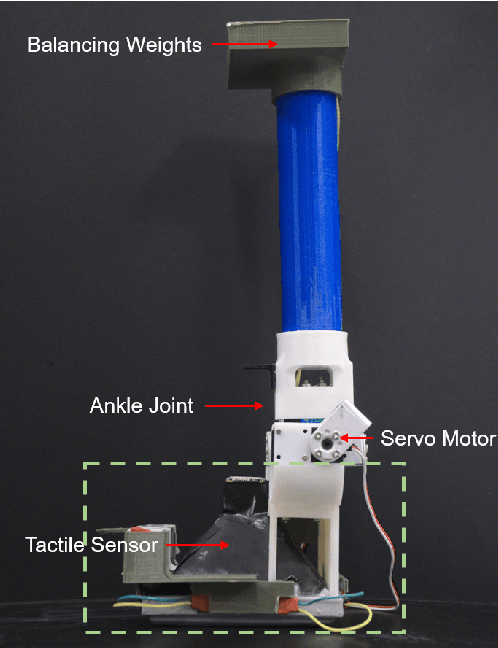
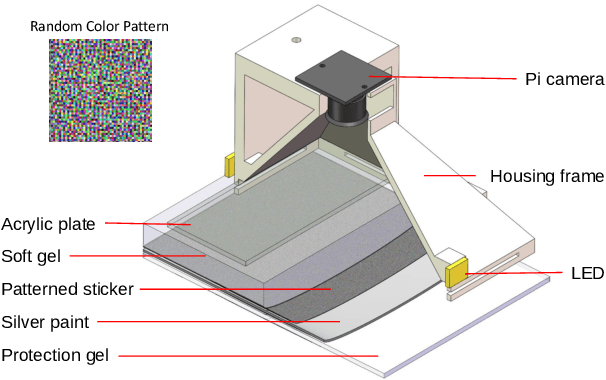

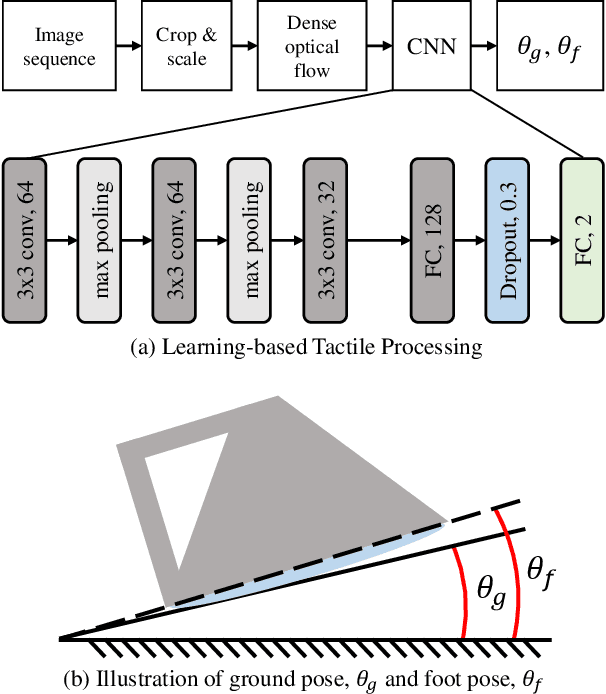
Tactile sensing on human feet is crucial for motion control, however, has not been explored in robotic counterparts. This work is dedicated to endowing tactile sensing to legged robot's feet and showing that a single-legged robot can be stabilized with only tactile sensing signals from its foot. We propose a robot leg with a novel vision-based tactile sensing foot system and implement a processing algorithm to extract contact information for feedback control in stabilizing tasks. A pipeline to convert images of the foot skin into high-level contact information using a deep learning framework is presented. The leg was quantitatively evaluated in a stabilization task on a tilting surface to show that the tactile foot was able to estimate both the surface tilting angle and the foot poses. Feasibility and effectiveness of the tactile system were investigated qualitatively in comparison with conventional single-legged robotic systems using inertia measurement units (IMU). Experiments demonstrate the capability of vision-based tactile sensors in assisting legged robots to maintain stability on unknown terrains and the potential for regulating more complex motions for humanoid robots.