 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFRTree Planner: Robot Navigation in Cluttered and Unknown Environments with Tree of Free Regions
Paper and Code
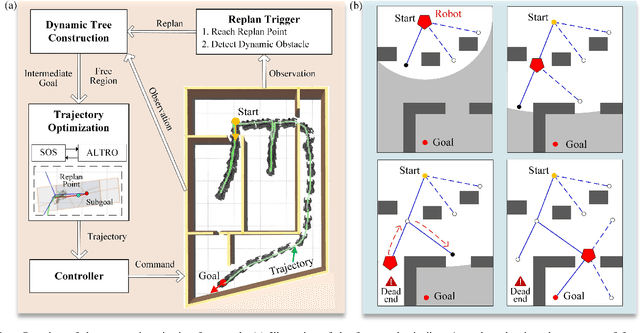

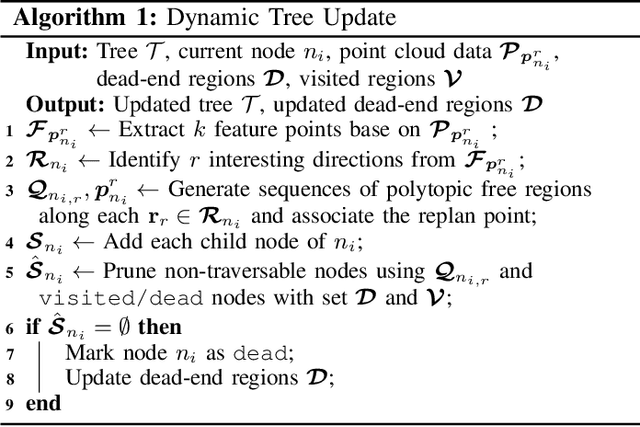
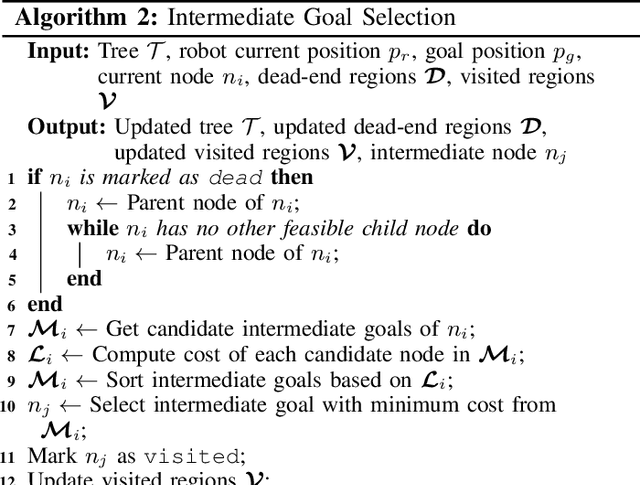
In this work, we present FRTree planner, a novel robot navigation framework that leverages a tree structure of free regions, specifically designed for navigation in cluttered and unknown environments with narrow passages. The framework continuously incorporates real-time perceptive information to identify distinct navigation options and dynamically expands the tree toward explorable and traversable directions. This dynamically constructed tree incrementally encodes the geometric and topological information of the collision-free space, enabling efficient selection of the intermediate goals, navigating around dead-end situations, and avoidance of dynamic obstacles without a prior map. Crucially, our method performs a comprehensive analysis of the geometric relationship between free regions and the robot during online replanning. In particular, the planner assesses the accessibility of candidate passages based on the robot's geometries, facilitating the effective selection of the most viable intermediate goals through accessible narrow passages while minimizing unnecessary detours. By combining the free region information with a bi-level trajectory optimization tailored for robots with specific geometries, our approach generates robust and adaptable obstacle avoidance strategies in confined spaces. Through extensive simulations and real-world experiments, FRTree demonstrates its superiority over benchmark methods in generating safe, efficient motion plans through highly cluttered and unknown terrains with narrow gaps.