 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Safe Trajectory Optimization for Mobile Manipulators With Neural Configuration Space Distance Field
Jan 27, 2026Mobile manipulators promise agile, long-horizon behavior by coordinating base and arm motion, yet whole-body trajectory optimization in cluttered, confined spaces remains difficult due to high-dimensional nonconvexity and the need for fast, accurate collision reasoning. Configuration Space Distance Fields (CDF) enable fixed-base manipulators to model collisions directly in configuration space via smooth, implicit distances. This representation holds strong potential to bypass the nonlinear configuration-to-workspace mapping while preserving accurate whole-body geometry and providing optimization-friendly collision costs. Yet, extending this capability to mobile manipulators is hindered by unbounded workspaces and tighter base-arm coupling. We lift this promise to mobile manipulation with Generalized Configuration Space Distance Fields (GCDF), extending CDF to robots with both translational and rotational joints in unbounded workspaces with tighter base-arm coupling. We prove that GCDF preserves Euclidean-like local distance structure and accurately encodes whole-body geometry in configuration space, and develop a data generation and training pipeline that yields continuous neural GCDFs with accurate values and gradients, supporting efficient GPU-batched queries. Building on this representation, we develop a high-performance sequential convex optimization framework centered on GCDF-based collision reasoning. The solver scales to large numbers of implicit constraints through (i) online specification of neural constraints, (ii) sparsity-aware active-set detection with parallel batched evaluation across thousands of constraints, and (iii) incremental constraint management for rapid replanning under scene changes.
FLORES: A Reconfigured Wheel-Legged Robot for Enhanced Steering and Adaptability
Jul 30, 2025Wheel-legged robots integrate the agility of legs for navigating rough terrains while harnessing the efficiency of wheels for smooth surfaces. However, most existing designs do not fully capitalize on the benefits of both legged and wheeled structures, which limits overall system flexibility and efficiency. We present FLORES (reconfigured wheel-legged robot for enhanced steering and adaptability), a novel wheel-legged robot design featuring a distinctive front-leg configuration that sets it beyond standard design approaches. Specifically, FLORES replaces the conventional hip-roll degree of freedom (DoF) of the front leg with hip-yaw DoFs, and this allows for efficient movement on flat surfaces while ensuring adaptability when navigating complex terrains. This innovative design facilitates seamless transitions between different locomotion modes (i.e., legged locomotion and wheeled locomotion) and optimizes the performance across varied environments. To fully exploit FLORES's mechanical capabilities, we develop a tailored reinforcement learning (RL) controller that adapts the Hybrid Internal Model (HIM) with a customized reward structure optimized for our unique mechanical configuration. This framework enables the generation of adaptive, multi-modal locomotion strategies that facilitate smooth transitions between wheeled and legged movements. Furthermore, our distinctive joint design enables the robot to exhibit novel and highly efficient locomotion gaits that capitalize on the synergistic advantages of both locomotion modes. Through comprehensive experiments, we demonstrate FLORES's enhanced steering capabilities, improved navigation efficiency, and versatile locomotion across various terrains. The open-source project can be found at https://github.com/ZhichengSong6/FLORES-A-Reconfigured-Wheel-Legged-Robot-for-Enhanced-Steering-and-Adaptability.git.
Interactive Navigation for Legged Manipulators with Learned Arm-Pushing Controller
Mar 03, 2025



Interactive navigation is crucial in scenarios where proactively interacting with objects can yield shorter paths, thus significantly improving traversal efficiency. Existing methods primarily focus on using the robot body to relocate large obstacles (which could be comparable to the size of a robot). However, they prove ineffective in narrow or constrained spaces where the robot's dimensions restrict its manipulation capabilities. This paper introduces a novel interactive navigation framework for legged manipulators, featuring an active arm-pushing mechanism that enables the robot to reposition movable obstacles in space-constrained environments. To this end, we develop a reinforcement learning-based arm-pushing controller with a two-stage reward strategy for large-object manipulation. Specifically, this strategy first directs the manipulator to a designated pushing zone to achieve a kinematically feasible contact configuration. Then, the end effector is guided to maintain its position at appropriate contact points for stable object displacement while preventing toppling. The simulations validate the robustness of the arm-pushing controller, showing that the two-stage reward strategy improves policy convergence and long-term performance. Real-world experiments further demonstrate the effectiveness of the proposed navigation framework, which achieves shorter paths and reduced traversal time. The open-source project can be found at https://github.com/Zhihaibi/Interactive-Navigation-for-legged-manipulator.git.
Local Reactive Control for Mobile Manipulators with Whole-Body Safety in Complex Environments
Jan 06, 2025



Mobile manipulators typically encounter significant challenges in navigating narrow, cluttered environments due to their high-dimensional state spaces and complex kinematics. While reactive methods excel in dynamic settings, they struggle to efficiently incorporate complex, coupled constraints across the entire state space. In this work, we present a novel local reactive controller that reformulates the time-domain single-step problem into a multi-step optimization problem in the spatial domain, leveraging the propagation of a serial kinematic chain. This transformation facilitates the formulation of customized, decoupled link-specific constraints, which is further solved efficiently with augmented Lagrangian differential dynamic programming (AL-DDP). Our approach naturally absorbs spatial kinematic propagation in the forward pass and processes all link-specific constraints simultaneously during the backward pass, enhancing both constraint management and computational efficiency. Notably, in this framework, we formulate collision avoidance constraints for each link using accurate geometric models with extracted free regions, and this improves the maneuverability of the mobile manipulator in narrow, cluttered spaces. Experimental results showcase significant improvements in safety, efficiency, and task completion rates. These findings underscore the robustness of the proposed method, particularly in narrow, cluttered environments where conventional approaches could falter. The open-source project can be found at https://github.com/Chunx1nZHENG/MM-with-Whole-Body-Safety-Release.git.
FRTree Planner: Robot Navigation in Cluttered and Unknown Environments with Tree of Free Regions
Oct 26, 2024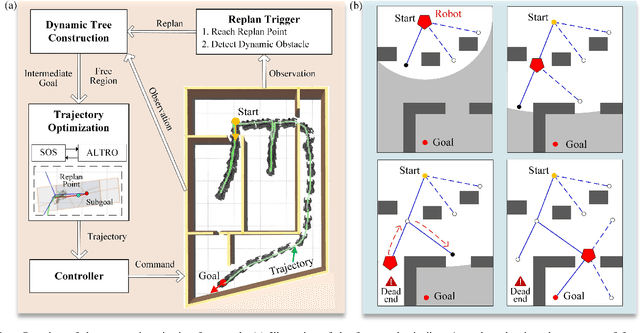

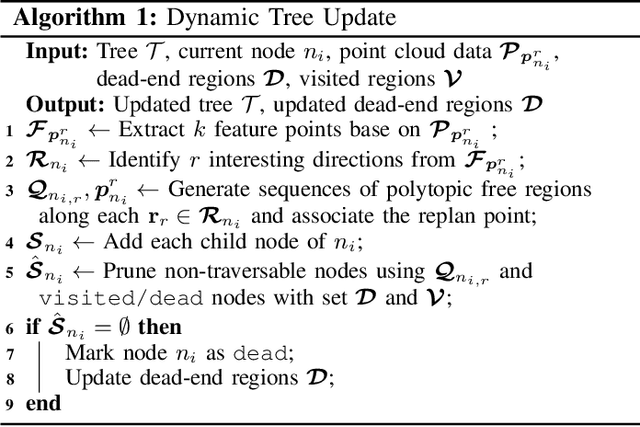
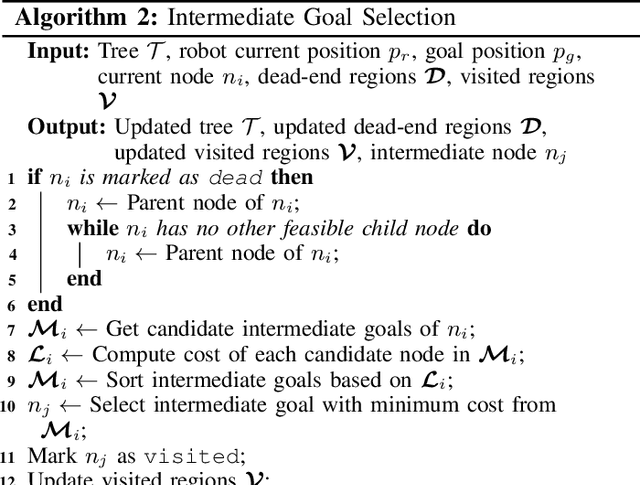
In this work, we present FRTree planner, a novel robot navigation framework that leverages a tree structure of free regions, specifically designed for navigation in cluttered and unknown environments with narrow passages. The framework continuously incorporates real-time perceptive information to identify distinct navigation options and dynamically expands the tree toward explorable and traversable directions. This dynamically constructed tree incrementally encodes the geometric and topological information of the collision-free space, enabling efficient selection of the intermediate goals, navigating around dead-end situations, and avoidance of dynamic obstacles without a prior map. Crucially, our method performs a comprehensive analysis of the geometric relationship between free regions and the robot during online replanning. In particular, the planner assesses the accessibility of candidate passages based on the robot's geometries, facilitating the effective selection of the most viable intermediate goals through accessible narrow passages while minimizing unnecessary detours. By combining the free region information with a bi-level trajectory optimization tailored for robots with specific geometries, our approach generates robust and adaptable obstacle avoidance strategies in confined spaces. Through extensive simulations and real-world experiments, FRTree demonstrates its superiority over benchmark methods in generating safe, efficient motion plans through highly cluttered and unknown terrains with narrow gaps.
Collision-Free Trajectory Optimization in Cluttered Environments with Sums-of-Squares Programming
Apr 08, 2024



In this work, we propose a trajectory optimization approach for robot navigation in cluttered 3D environments. We represent the robot's geometry as a semialgebraic set defined by polynomial inequalities such that robots with general shapes can be suitably characterized. To address the robot navigation task in obstacle-dense environments, we exploit the free space directly to construct a sequence of free regions, and allocate each waypoint on the trajectory to a specific region. Then, we incorporate a uniform scaling factor for each free region, and formulate a Sums-of-Squares (SOS) optimization problem that renders the containment relationship between the robot and the free space computationally tractable. The SOS optimization problem is further reformulated to a semidefinite program (SDP), and the collision-free constraints are shown to be equivalent to limiting the scaling factor along the entire trajectory. In this context, the robot at a specific configuration is tailored to stay within the free region. Next, to solve the trajectory optimization problem with the proposed safety constraints (which are implicitly dependent on the robot configurations), we derive the analytical solution to the gradient of the minimum scaling factor with respect to the robot configuration. As a result, this seamlessly facilitates the use of gradient-based methods in efficient solving of the trajectory optimization problem. Through a series of simulations and real-world experiments, the proposed trajectory optimization approach is validated in various challenging scenarios, and the results demonstrate its effectiveness in generating collision-free trajectories in dense and intricate environments populated with obstacles.
Geometry-Aware Safety-Critical Local Reactive Controller for Robot Navigation in Unknown and Cluttered Environments
Oct 09, 2023



This work proposes a safety-critical local reactive controller that enables the robot to navigate in unknown and cluttered environments. In particular, the trajectory tracking task is formulated as a constrained polynomial optimization problem. Then, safety constraints are imposed on the control variables invoking the notion of polynomial positivity certificates in conjunction with their Sum-of-Squares (SOS) approximation, thereby confining the robot motion inside the locally extracted convex free region. It is noteworthy that, in the process of devising the proposed safety constraints, the geometry of the robot can be approximated using any shape that can be characterized with a set of polynomial functions. The optimization problem is further convexified into a semidefinite program (SDP) leveraging truncated multi-sequences (tms) and moment relaxation, which favorably facilitates the effective use of off-the-shelf conic programming solvers, such that real-time performance is attainable. Various robot navigation tasks are investigated to demonstrate the effectiveness of the proposed approach in terms of safety and tracking performance.