 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic-LiDAR-Inertial-Wheel Odometry Fusion for Robust Localization in Large-Scale Dynamic Environments
Sep 18, 2025Reliable, drift-free global localization presents significant challenges yet remains crucial for autonomous navigation in large-scale dynamic environments. In this paper, we introduce a tightly-coupled Semantic-LiDAR-Inertial-Wheel Odometry fusion framework, which is specifically designed to provide high-precision state estimation and robust localization in large-scale dynamic environments. Our framework leverages an efficient semantic-voxel map representation and employs an improved scan matching algorithm, which utilizes global semantic information to significantly reduce long-term trajectory drift. Furthermore, it seamlessly fuses data from LiDAR, IMU, and wheel odometry using a tightly-coupled multi-sensor fusion Iterative Error-State Kalman Filter (iESKF). This ensures reliable localization without experiencing abnormal drift. Moreover, to tackle the challenges posed by terrain variations and dynamic movements, we introduce a 3D adaptive scaling strategy that allows for flexible adjustments to wheel odometry measurement weights, thereby enhancing localization precision. This study presents extensive real-world experiments conducted in a one-million-square-meter automated port, encompassing 3,575 hours of operational data from 35 Intelligent Guided Vehicles (IGVs). The results consistently demonstrate that our system outperforms state-of-the-art LiDAR-based localization methods in large-scale dynamic environments, highlighting the framework's reliability and practical value.
DuLoc: Life-Long Dual-Layer Localization in Changing and Dynamic Expansive Scenarios
Jul 31, 2025LiDAR-based localization serves as a critical component in autonomous systems, yet existing approaches face persistent challenges in balancing repeatability, accuracy, and environmental adaptability. Traditional point cloud registration methods relying solely on offline maps often exhibit limited robustness against long-term environmental changes, leading to localization drift and reliability degradation in dynamic real-world scenarios. To address these challenges, this paper proposes DuLoc, a robust and accurate localization method that tightly couples LiDAR-inertial odometry with offline map-based localization, incorporating a constant-velocity motion model to mitigate outlier noise in real-world scenarios. Specifically, we develop a LiDAR-based localization framework that seamlessly integrates a prior global map with dynamic real-time local maps, enabling robust localization in unbounded and changing environments. Extensive real-world experiments in ultra unbounded port that involve 2,856 hours of operational data across 32 Intelligent Guided Vehicles (IGVs) are conducted and reported in this study. The results attained demonstrate that our system outperforms other state-of-the-art LiDAR localization systems in large-scale changing outdoor environments.
Fast and Scalable Game-Theoretic Trajectory Planning with Intentional Uncertainties
Jul 16, 2025Trajectory planning involving multi-agent interactions has been a long-standing challenge in the field of robotics, primarily burdened by the inherent yet intricate interactions among agents. While game-theoretic methods are widely acknowledged for their effectiveness in managing multi-agent interactions, significant impediments persist when it comes to accommodating the intentional uncertainties of agents. In the context of intentional uncertainties, the heavy computational burdens associated with existing game-theoretic methods are induced, leading to inefficiencies and poor scalability. In this paper, we propose a novel game-theoretic interactive trajectory planning method to effectively address the intentional uncertainties of agents, and it demonstrates both high efficiency and enhanced scalability. As the underpinning basis, we model the interactions between agents under intentional uncertainties as a general Bayesian game, and we show that its agent-form equivalence can be represented as a potential game under certain minor assumptions. The existence and attainability of the optimal interactive trajectories are illustrated, as the corresponding Bayesian Nash equilibrium can be attained by optimizing a unified optimization problem. Additionally, we present a distributed algorithm based on the dual consensus alternating direction method of multipliers (ADMM) tailored to the parallel solving of the problem, thereby significantly improving the scalability. The attendant outcomes from simulations and experiments demonstrate that the proposed method is effective across a range of scenarios characterized by general forms of intentional uncertainties. Its scalability surpasses that of existing centralized and decentralized baselines, allowing for real-time interactive trajectory planning in uncertain game settings.
Semi-SD: Semi-Supervised Metric Depth Estimation via Surrounding Cameras for Autonomous Driving
Mar 25, 2025



In this paper, we introduce Semi-SD, a novel metric depth estimation framework tailored for surrounding cameras equipment in autonomous driving. In this work, the input data consists of adjacent surrounding frames and camera parameters. We propose a unified spatial-temporal-semantic fusion module to construct the visual fused features. Cross-attention components for surrounding cameras and adjacent frames are utilized to focus on metric scale information refinement and temporal feature matching. Building on this, we propose a pose estimation framework using surrounding cameras, their corresponding estimated depths, and extrinsic parameters, which effectively address the scale ambiguity in multi-camera setups. Moreover, semantic world model and monocular depth estimation world model are integrated to supervised the depth estimation, which improve the quality of depth estimation. We evaluate our algorithm on DDAD and nuScenes datasets, and the results demonstrate that our method achieves state-of-the-art performance in terms of surrounding camera based depth estimation quality. The source code will be available on https://github.com/xieyuser/Semi-SD.
GS-LIVM: Real-Time Photo-Realistic LiDAR-Inertial-Visual Mapping with Gaussian Splatting
Oct 18, 2024
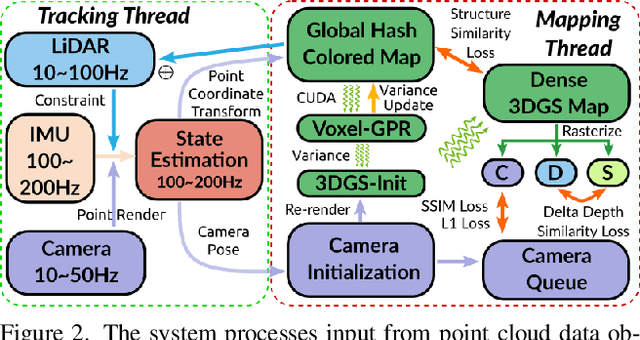
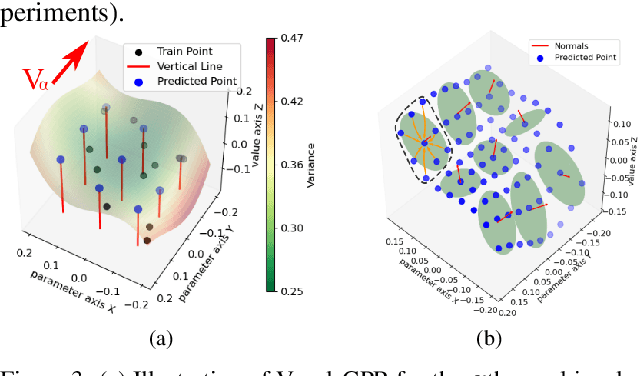
In this paper, we introduce GS-LIVM, a real-time photo-realistic LiDAR-Inertial-Visual mapping framework with Gaussian Splatting tailored for outdoor scenes. Compared to existing methods based on Neural Radiance Fields (NeRF) and 3D Gaussian Splatting (3DGS), our approach enables real-time photo-realistic mapping while ensuring high-quality image rendering in large-scale unbounded outdoor environments. In this work, Gaussian Process Regression (GPR) is employed to mitigate the issues resulting from sparse and unevenly distributed LiDAR observations. The voxel-based 3D Gaussians map representation facilitates real-time dense mapping in large outdoor environments with acceleration governed by custom CUDA kernels. Moreover, the overall framework is designed in a covariance-centered manner, where the estimated covariance is used to initialize the scale and rotation of 3D Gaussians, as well as update the parameters of the GPR. We evaluate our algorithm on several outdoor datasets, and the results demonstrate that our method achieves state-of-the-art performance in terms of mapping efficiency and rendering quality. The source code is available on GitHub.
MCGMapper: Light-Weight Incremental Structure from Motion and Visual Localization With Planar Markers and Camera Groups
May 26, 2024Structure from Motion (SfM) and visual localization in indoor texture-less scenes and industrial scenarios present prevalent yet challenging research topics. Existing SfM methods designed for natural scenes typically yield low accuracy or map-building failures due to insufficient robust feature extraction in such settings. Visual markers, with their artificially designed features, can effectively address these issues. Nonetheless, existing marker-assisted SfM methods encounter problems like slow running speed and difficulties in convergence; and also, they are governed by the strong assumption of unique marker size. In this paper, we propose a novel SfM framework that utilizes planar markers and multiple cameras with known extrinsics to capture the surrounding environment and reconstruct the marker map. In our algorithm, the initial poses of markers and cameras are calculated with Perspective-n-Points (PnP) in the front-end, while bundle adjustment methods customized for markers and camera groups are designed in the back-end to optimize the 6-DOF pose directly. Our algorithm facilitates the reconstruction of large scenes with different marker sizes, and its accuracy and speed of map building are shown to surpass existing methods. Our approach is suitable for a wide range of scenarios, including laboratories, basements, warehouses, and other industrial settings. Furthermore, we incorporate representative scenarios into simulations and also supply our datasets with pose labels to address the scarcity of quantitative ground-truth datasets in this research field. The datasets and source code are available on GitHub.
Collision-Free Trajectory Optimization in Cluttered Environments with Sums-of-Squares Programming
Apr 08, 2024



In this work, we propose a trajectory optimization approach for robot navigation in cluttered 3D environments. We represent the robot's geometry as a semialgebraic set defined by polynomial inequalities such that robots with general shapes can be suitably characterized. To address the robot navigation task in obstacle-dense environments, we exploit the free space directly to construct a sequence of free regions, and allocate each waypoint on the trajectory to a specific region. Then, we incorporate a uniform scaling factor for each free region, and formulate a Sums-of-Squares (SOS) optimization problem that renders the containment relationship between the robot and the free space computationally tractable. The SOS optimization problem is further reformulated to a semidefinite program (SDP), and the collision-free constraints are shown to be equivalent to limiting the scaling factor along the entire trajectory. In this context, the robot at a specific configuration is tailored to stay within the free region. Next, to solve the trajectory optimization problem with the proposed safety constraints (which are implicitly dependent on the robot configurations), we derive the analytical solution to the gradient of the minimum scaling factor with respect to the robot configuration. As a result, this seamlessly facilitates the use of gradient-based methods in efficient solving of the trajectory optimization problem. Through a series of simulations and real-world experiments, the proposed trajectory optimization approach is validated in various challenging scenarios, and the results demonstrate its effectiveness in generating collision-free trajectories in dense and intricate environments populated with obstacles.