 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGS-LIVM: Real-Time Photo-Realistic LiDAR-Inertial-Visual Mapping with Gaussian Splatting
Paper and Code

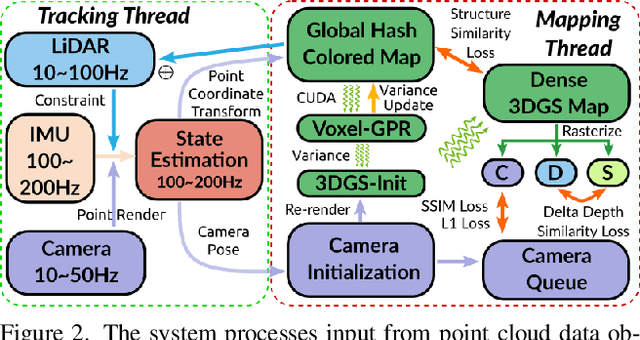
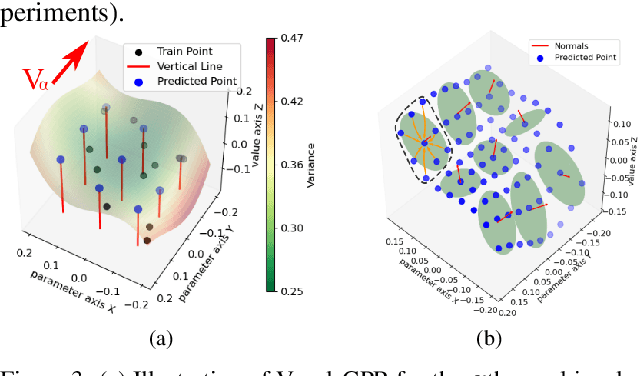
In this paper, we introduce GS-LIVM, a real-time photo-realistic LiDAR-Inertial-Visual mapping framework with Gaussian Splatting tailored for outdoor scenes. Compared to existing methods based on Neural Radiance Fields (NeRF) and 3D Gaussian Splatting (3DGS), our approach enables real-time photo-realistic mapping while ensuring high-quality image rendering in large-scale unbounded outdoor environments. In this work, Gaussian Process Regression (GPR) is employed to mitigate the issues resulting from sparse and unevenly distributed LiDAR observations. The voxel-based 3D Gaussians map representation facilitates real-time dense mapping in large outdoor environments with acceleration governed by custom CUDA kernels. Moreover, the overall framework is designed in a covariance-centered manner, where the estimated covariance is used to initialize the scale and rotation of 3D Gaussians, as well as update the parameters of the GPR. We evaluate our algorithm on several outdoor datasets, and the results demonstrate that our method achieves state-of-the-art performance in terms of mapping efficiency and rendering quality. The source code is available on GitHub.