 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Scalable Game-Theoretic Trajectory Planning with Intentional Uncertainties
Jul 16, 2025Trajectory planning involving multi-agent interactions has been a long-standing challenge in the field of robotics, primarily burdened by the inherent yet intricate interactions among agents. While game-theoretic methods are widely acknowledged for their effectiveness in managing multi-agent interactions, significant impediments persist when it comes to accommodating the intentional uncertainties of agents. In the context of intentional uncertainties, the heavy computational burdens associated with existing game-theoretic methods are induced, leading to inefficiencies and poor scalability. In this paper, we propose a novel game-theoretic interactive trajectory planning method to effectively address the intentional uncertainties of agents, and it demonstrates both high efficiency and enhanced scalability. As the underpinning basis, we model the interactions between agents under intentional uncertainties as a general Bayesian game, and we show that its agent-form equivalence can be represented as a potential game under certain minor assumptions. The existence and attainability of the optimal interactive trajectories are illustrated, as the corresponding Bayesian Nash equilibrium can be attained by optimizing a unified optimization problem. Additionally, we present a distributed algorithm based on the dual consensus alternating direction method of multipliers (ADMM) tailored to the parallel solving of the problem, thereby significantly improving the scalability. The attendant outcomes from simulations and experiments demonstrate that the proposed method is effective across a range of scenarios characterized by general forms of intentional uncertainties. Its scalability surpasses that of existing centralized and decentralized baselines, allowing for real-time interactive trajectory planning in uncertain game settings.
Fair Play in the Fast Lane: Integrating Sportsmanship into Autonomous Racing Systems
Mar 04, 2025Autonomous racing has gained significant attention as a platform for high-speed decision-making and motion control. While existing methods primarily focus on trajectory planning and overtaking strategies, the role of sportsmanship in ensuring fair competition remains largely unexplored. In human racing, rules such as the one-motion rule and the enough-space rule prevent dangerous and unsportsmanlike behavior. However, autonomous racing systems often lack mechanisms to enforce these principles, potentially leading to unsafe maneuvers. This paper introduces a bi-level game-theoretic framework to integrate sportsmanship (SPS) into versus racing. At the high level, we model racing intentions using a Stackelberg game, where Monte Carlo Tree Search (MCTS) is employed to derive optimal strategies. At the low level, vehicle interactions are formulated as a Generalized Nash Equilibrium Problem (GNEP), ensuring that all agents follow sportsmanship constraints while optimizing their trajectories. Simulation results demonstrate the effectiveness of the proposed approach in enforcing sportsmanship rules while maintaining competitive performance. We analyze different scenarios where attackers and defenders adhere to or disregard sportsmanship rules and show how knowledge of these constraints influences strategic decision-making. This work highlights the importance of balancing competition and fairness in autonomous racing and provides a foundation for developing ethical and safe AI-driven racing systems.
CoDriveVLM: VLM-Enhanced Urban Cooperative Dispatching and Motion Planning for Future Autonomous Mobility on Demand Systems
Jan 10, 2025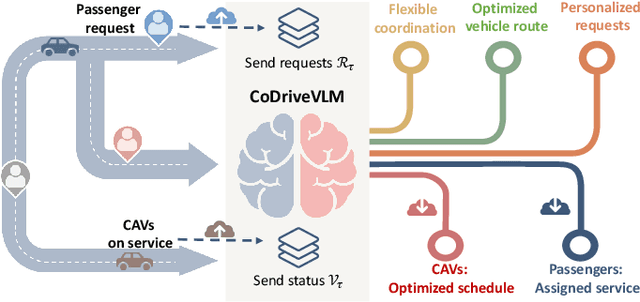



The increasing demand for flexible and efficient urban transportation solutions has spotlighted the limitations of traditional Demand Responsive Transport (DRT) systems, particularly in accommodating diverse passenger needs and dynamic urban environments. Autonomous Mobility-on-Demand (AMoD) systems have emerged as a promising alternative, leveraging connected and autonomous vehicles (CAVs) to provide responsive and adaptable services. However, existing methods primarily focus on either vehicle scheduling or path planning, which often simplify complex urban layouts and neglect the necessity for simultaneous coordination and mutual avoidance among CAVs. This oversimplification poses significant challenges to the deployment of AMoD systems in real-world scenarios. To address these gaps, we propose CoDriveVLM, a novel framework that integrates high-fidelity simultaneous dispatching and cooperative motion planning for future AMoD systems. Our method harnesses Vision-Language Models (VLMs) to enhance multi-modality information processing, and this enables comprehensive dispatching and collision risk evaluation. The VLM-enhanced CAV dispatching coordinator is introduced to effectively manage complex and unforeseen AMoD conditions, thus supporting efficient scheduling decision-making. Furthermore, we propose a scalable decentralized cooperative motion planning method via consensus alternating direction method of multipliers (ADMM) focusing on collision risk evaluation and decentralized trajectory optimization. Simulation results demonstrate the feasibility and robustness of CoDriveVLM in various traffic conditions, showcasing its potential to significantly improve the fidelity and effectiveness of AMoD systems in future urban transportation networks. The code is available at https://github.com/henryhcliu/CoDriveVLM.git.
UDMC: Unified Decision-Making and Control Framework for Urban Autonomous Driving with Motion Prediction of Traffic Participants
Jan 05, 2025



Current autonomous driving systems often struggle to balance decision-making and motion control while ensuring safety and traffic rule compliance, especially in complex urban environments. Existing methods may fall short due to separate handling of these functionalities, leading to inefficiencies and safety compromises. To address these challenges, we introduce UDMC, an interpretable and unified Level 4 autonomous driving framework. UDMC integrates decision-making and motion control into a single optimal control problem (OCP), considering the dynamic interactions with surrounding vehicles, pedestrians, road lanes, and traffic signals. By employing innovative potential functions to model traffic participants and regulations, and incorporating a specialized motion prediction module, our framework enhances on-road safety and rule adherence. The integrated design allows for real-time execution of flexible maneuvers suited to diverse driving scenarios. High-fidelity simulations conducted in CARLA exemplify the framework's computational efficiency, robustness, and safety, resulting in superior driving performance when compared against various baseline models. Our open-source project is available at https://github.com/henryhcliu/udmc_carla.git.
Synergizing Decision Making and Trajectory Planning Using Two-Stage Optimization for Autonomous Vehicles
Nov 28, 2024



This paper introduces a local planner that synergizes the decision making and trajectory planning modules towards autonomous driving. The decision making and trajectory planning tasks are jointly formulated as a nonlinear programming problem with an integrated objective function. However, integrating the discrete decision variables into the continuous trajectory optimization leads to a mixed-integer programming (MIP) problem with inherent nonlinearity and nonconvexity. To address the challenge in solving the problem, the original problem is decomposed into two sub-stages, and a two-stage optimization (TSO) based approach is presented to ensure the coherence in outcomes for the two stages. The optimization problem in the first stage determines the optimal decision sequence that acts as an informed initialization. With the outputs from the first stage, the second stage necessitates the use of a high-fidelity vehicle model and strict enforcement of the collision avoidance constraints as part of the trajectory planning problem. We evaluate the effectiveness of our proposed planner across diverse multi-lane scenarios. The results demonstrate that the proposed planner simultaneously generates a sequence of optimal decisions and the corresponding trajectory that significantly improves driving performance in terms of driving safety and traveling efficiency as compared to alternative methods. Additionally, we implement the closed-loop simulation in CARLA, and the results showcase the effectiveness of the proposed planner to adapt to changing driving situations with high computational efficiency.
GS-LIVM: Real-Time Photo-Realistic LiDAR-Inertial-Visual Mapping with Gaussian Splatting
Oct 18, 2024
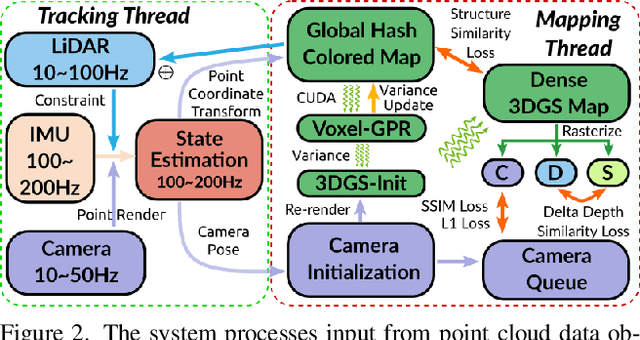
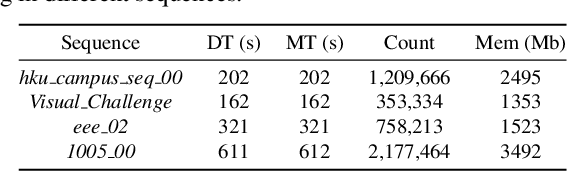
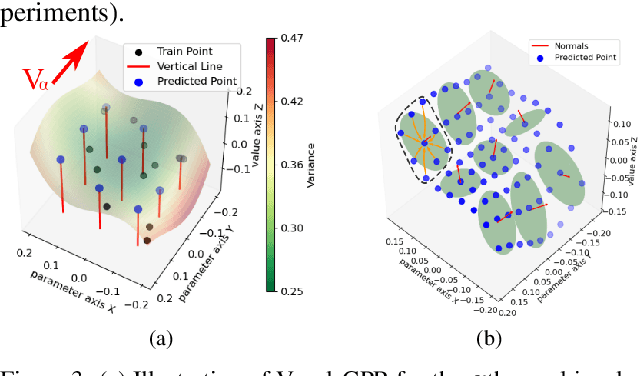
In this paper, we introduce GS-LIVM, a real-time photo-realistic LiDAR-Inertial-Visual mapping framework with Gaussian Splatting tailored for outdoor scenes. Compared to existing methods based on Neural Radiance Fields (NeRF) and 3D Gaussian Splatting (3DGS), our approach enables real-time photo-realistic mapping while ensuring high-quality image rendering in large-scale unbounded outdoor environments. In this work, Gaussian Process Regression (GPR) is employed to mitigate the issues resulting from sparse and unevenly distributed LiDAR observations. The voxel-based 3D Gaussians map representation facilitates real-time dense mapping in large outdoor environments with acceleration governed by custom CUDA kernels. Moreover, the overall framework is designed in a covariance-centered manner, where the estimated covariance is used to initialize the scale and rotation of 3D Gaussians, as well as update the parameters of the GPR. We evaluate our algorithm on several outdoor datasets, and the results demonstrate that our method achieves state-of-the-art performance in terms of mapping efficiency and rendering quality. The source code is available on GitHub.
A Universal Multi-Vehicle Cooperative Decision-Making Approach in Structured Roads by Mixed-Integer Potential Game
Sep 24, 2024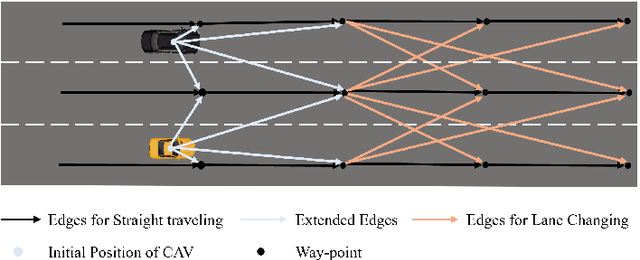
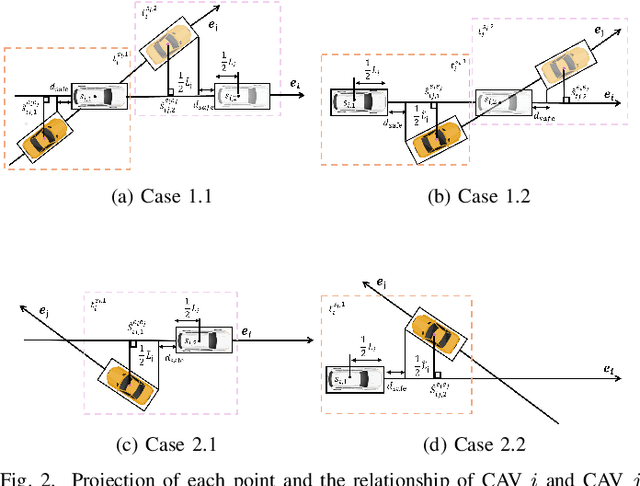
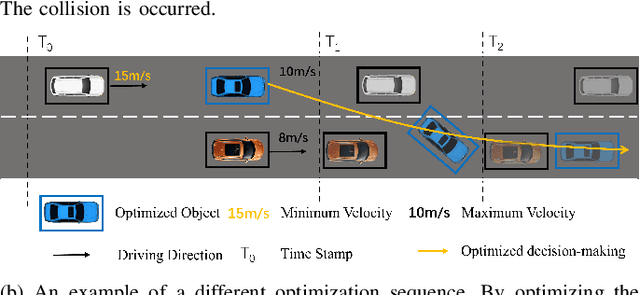
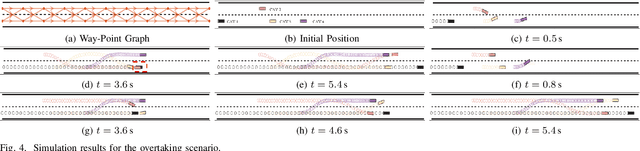
Due to the intricate of real-world road topologies and the inherent complexity of autonomous vehicles, cooperative decision-making for multiple connected autonomous vehicles (CAVs) remains a significant challenge. Currently, most methods are tailored to specific scenarios, and the efficiency of existing optimization and learning methods applicable to diverse scenarios is hindered by the complexity of modeling and data dependency, which limit their real-world applicability. To address these issues, this paper proposes a universal multi-vehicle cooperative decision-making method in structured roads with game theory. We transform the decision-making problem into a graph path searching problem within a way-point graph framework. The problem is formulated as a mixed-integer linear programming problem (MILP) first and transformed into a mixed-integer potential game (MIPG), which reduces the scope of problem and ensures that no player needs to sacrifice for the overall cost. Two Gauss-Seidel algorithms for cooperative decision-making are presented to solve the MIPG problem and obtain the Nash equilibrium solutions. Specifically, the sequential Gauss-Seidel algorithm for cooperative decision-making considers the varying degrees of CAV interactions and flexibility in adjustment strategies to determine optimization priorities, which reduces the frequency of ineffective optimizations. Experimental evaluations across various urban traffic scenarios with different topological structures demonstrate the effectiveness and efficiency of the proposed method compared with MILP and comparisons of different optimization sequences validate the efficiency of the sequential Gauss-Seidel algorithm for cooperative decision-making.
Integrated Decision Making and Trajectory Planning for Autonomous Driving Under Multimodal Uncertainties: A Bayesian Game Approach
Sep 21, 2024Modeling the interaction between traffic agents is a key issue in designing safe and non-conservative maneuvers in autonomous driving. This problem can be challenging when multi-modality and behavioral uncertainties are engaged. Existing methods either fail to plan interactively or consider unimodal behaviors that could lead to catastrophic results. In this paper, we introduce an integrated decision-making and trajectory planning framework based on Bayesian game (i.e., game of incomplete information). Human decisions inherently exhibit discrete characteristics and therefore are modeled as types of players in the game. A general solver based on no-regret learning is introduced to obtain a corresponding Bayesian Coarse Correlated Equilibrium, which captures the interaction between traffic agents in the multimodal context. With the attained equilibrium, decision-making and trajectory planning are performed simultaneously, and the resulting interactive strategy is shown to be optimal over the expectation of rivals' driving intentions. Closed-loop simulations on different traffic scenarios are performed to illustrate the generalizability and the effectiveness of the proposed framework.
LMMCoDrive: Cooperative Driving with Large Multimodal Model
Sep 18, 2024To address the intricate challenges of decentralized cooperative scheduling and motion planning in Autonomous Mobility-on-Demand (AMoD) systems, this paper introduces LMMCoDrive, a novel cooperative driving framework that leverages a Large Multimodal Model (LMM) to enhance traffic efficiency in dynamic urban environments. This framework seamlessly integrates scheduling and motion planning processes to ensure the effective operation of Cooperative Autonomous Vehicles (CAVs). The spatial relationship between CAVs and passenger requests is abstracted into a Bird's-Eye View (BEV) to fully exploit the potential of the LMM. Besides, trajectories are cautiously refined for each CAV while ensuring collision avoidance through safety constraints. A decentralized optimization strategy, facilitated by the Alternating Direction Method of Multipliers (ADMM) within the LMM framework, is proposed to drive the graph evolution of CAVs. Simulation results demonstrate the pivotal role and significant impact of LMM in optimizing CAV scheduling and enhancing decentralized cooperative optimization process for each vehicle. This marks a substantial stride towards achieving practical, efficient, and safe AMoD systems that are poised to revolutionize urban transportation. The code is available at https://github.com/henryhcliu/LMMCoDrive.
MCGMapper: Light-Weight Incremental Structure from Motion and Visual Localization With Planar Markers and Camera Groups
May 26, 2024Structure from Motion (SfM) and visual localization in indoor texture-less scenes and industrial scenarios present prevalent yet challenging research topics. Existing SfM methods designed for natural scenes typically yield low accuracy or map-building failures due to insufficient robust feature extraction in such settings. Visual markers, with their artificially designed features, can effectively address these issues. Nonetheless, existing marker-assisted SfM methods encounter problems like slow running speed and difficulties in convergence; and also, they are governed by the strong assumption of unique marker size. In this paper, we propose a novel SfM framework that utilizes planar markers and multiple cameras with known extrinsics to capture the surrounding environment and reconstruct the marker map. In our algorithm, the initial poses of markers and cameras are calculated with Perspective-n-Points (PnP) in the front-end, while bundle adjustment methods customized for markers and camera groups are designed in the back-end to optimize the 6-DOF pose directly. Our algorithm facilitates the reconstruction of large scenes with different marker sizes, and its accuracy and speed of map building are shown to surpass existing methods. Our approach is suitable for a wide range of scenarios, including laboratories, basements, warehouses, and other industrial settings. Furthermore, we incorporate representative scenarios into simulations and also supply our datasets with pose labels to address the scarcity of quantitative ground-truth datasets in this research field. The datasets and source code are available on GitHub.