 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDualShield: Safe Model Predictive Diffusion via Reachability Analysis for Interactive Autonomous Driving
Jan 22, 2026Diffusion models have emerged as a powerful approach for multimodal motion planning in autonomous driving. However, their practical deployment is typically hindered by the inherent difficulty in enforcing vehicle dynamics and a critical reliance on accurate predictions of other agents, making them prone to safety issues under uncertain interactions. To address these limitations, we introduce DualShield, a planning and control framework that leverages Hamilton-Jacobi (HJ) reachability value functions in a dual capacity. First, the value functions act as proactive guidance, steering the diffusion denoising process towards safe and dynamically feasible regions. Second, they form a reactive safety shield using control barrier-value functions (CBVFs) to modify the executed actions and ensure safety. This dual mechanism preserves the rich exploration capabilities of diffusion models while providing principled safety assurance under uncertain and even adversarial interactions. Simulations in challenging unprotected U-turn scenarios demonstrate that DualShield significantly improves both safety and task efficiency compared to leading methods from different planning paradigms under uncertainty.
nuPlan-R: A Closed-Loop Planning Benchmark for Autonomous Driving via Reactive Multi-Agent Simulation
Nov 13, 2025Recent advances in closed-loop planning benchmarks have significantly improved the evaluation of autonomous vehicles. However, existing benchmarks still rely on rule-based reactive agents such as the Intelligent Driver Model (IDM), which lack behavioral diversity and fail to capture realistic human interactions, leading to oversimplified traffic dynamics. To address these limitations, we present nuPlan-R, a new reactive closed-loop planning benchmark that integrates learning-based reactive multi-agent simulation into the nuPlan framework. Our benchmark replaces the rule-based IDM agents with noise-decoupled diffusion-based reactive agents and introduces an interaction-aware agent selection mechanism to ensure both realism and computational efficiency. Furthermore, we extend the benchmark with two additional metrics to enable a more comprehensive assessment of planning performance. Extensive experiments demonstrate that our reactive agent model produces more realistic, diverse, and human-like traffic behaviors, leading to a benchmark environment that better reflects real-world interactive driving. We further reimplement a collection of rule-based, learning-based, and hybrid planning approaches within our nuPlan-R benchmark, providing a clearer reflection of planner performance in complex interactive scenarios and better highlighting the advantages of learning-based planners in handling complex and dynamic scenarios. These results establish nuPlan-R as a new standard for fair, reactive, and realistic closed-loop planning evaluation. We will open-source the code for the new benchmark.
LD-Scene: LLM-Guided Diffusion for Controllable Generation of Adversarial Safety-Critical Driving Scenarios
May 16, 2025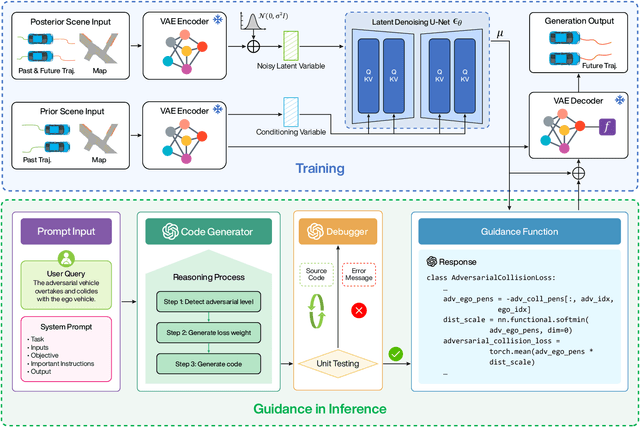

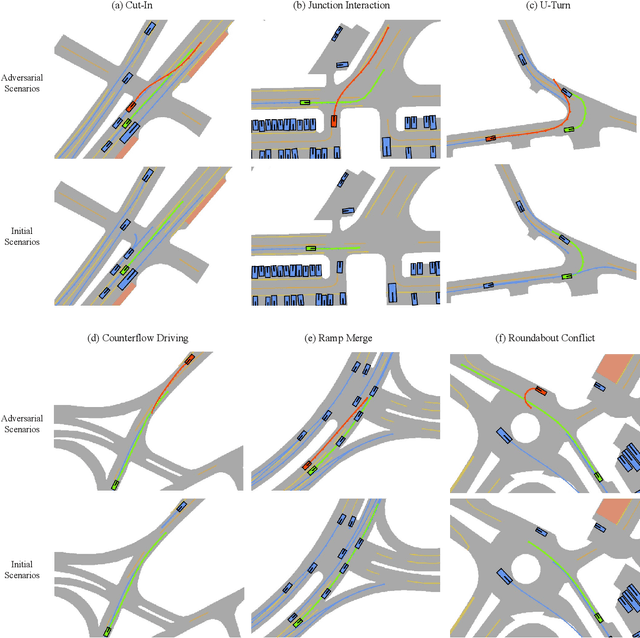

Ensuring the safety and robustness of autonomous driving systems necessitates a comprehensive evaluation in safety-critical scenarios. However, these safety-critical scenarios are rare and difficult to collect from real-world driving data, posing significant challenges to effectively assessing the performance of autonomous vehicles. Typical existing methods often suffer from limited controllability and lack user-friendliness, as extensive expert knowledge is essentially required. To address these challenges, we propose LD-Scene, a novel framework that integrates Large Language Models (LLMs) with Latent Diffusion Models (LDMs) for user-controllable adversarial scenario generation through natural language. Our approach comprises an LDM that captures realistic driving trajectory distributions and an LLM-based guidance module that translates user queries into adversarial loss functions, facilitating the generation of scenarios aligned with user queries. The guidance module integrates an LLM-based Chain-of-Thought (CoT) code generator and an LLM-based code debugger, enhancing the controllability and robustness in generating guidance functions. Extensive experiments conducted on the nuScenes dataset demonstrate that LD-Scene achieves state-of-the-art performance in generating realistic, diverse, and effective adversarial scenarios. Furthermore, our framework provides fine-grained control over adversarial behaviors, thereby facilitating more effective testing tailored to specific driving scenarios.
HM-RAG: Hierarchical Multi-Agent Multimodal Retrieval Augmented Generation
Apr 13, 2025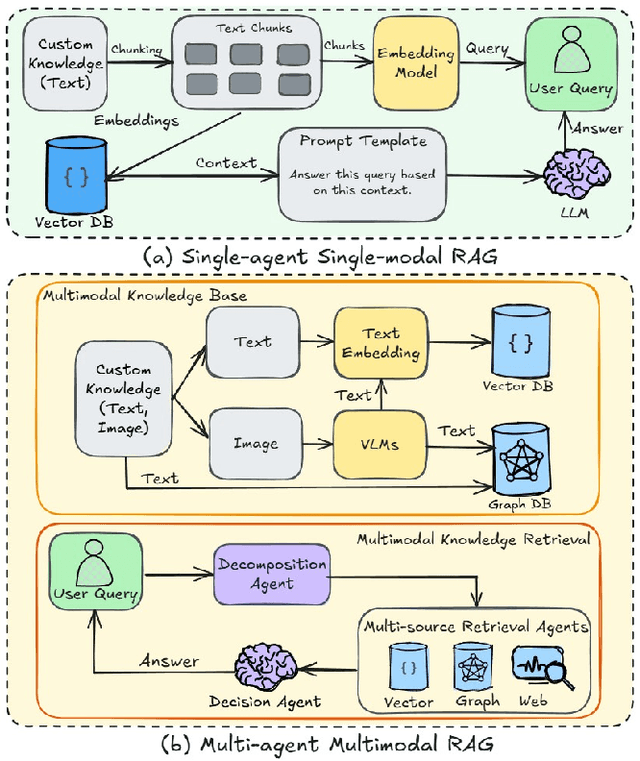
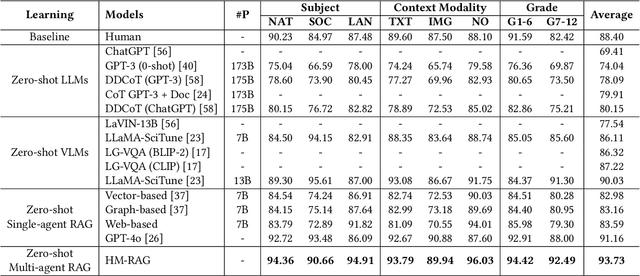
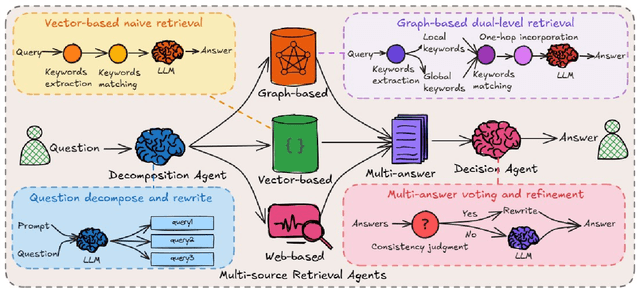
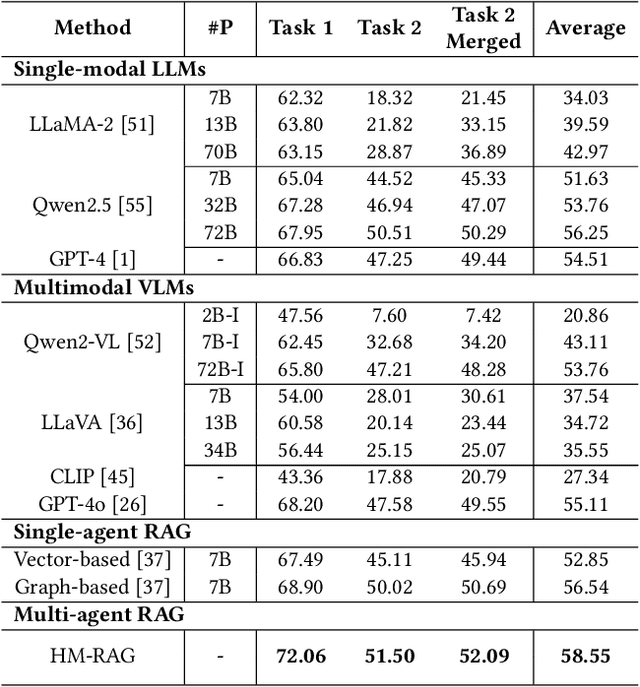
While Retrieval-Augmented Generation (RAG) augments Large Language Models (LLMs) with external knowledge, conventional single-agent RAG remains fundamentally limited in resolving complex queries demanding coordinated reasoning across heterogeneous data ecosystems. We present HM-RAG, a novel Hierarchical Multi-agent Multimodal RAG framework that pioneers collaborative intelligence for dynamic knowledge synthesis across structured, unstructured, and graph-based data. The framework is composed of three-tiered architecture with specialized agents: a Decomposition Agent that dissects complex queries into contextually coherent sub-tasks via semantic-aware query rewriting and schema-guided context augmentation; Multi-source Retrieval Agents that carry out parallel, modality-specific retrieval using plug-and-play modules designed for vector, graph, and web-based databases; and a Decision Agent that uses consistency voting to integrate multi-source answers and resolve discrepancies in retrieval results through Expert Model Refinement. This architecture attains comprehensive query understanding by combining textual, graph-relational, and web-derived evidence, resulting in a remarkable 12.95% improvement in answer accuracy and a 3.56% boost in question classification accuracy over baseline RAG systems on the ScienceQA and CrisisMMD benchmarks. Notably, HM-RAG establishes state-of-the-art results in zero-shot settings on both datasets. Its modular architecture ensures seamless integration of new data modalities while maintaining strict data governance, marking a significant advancement in addressing the critical challenges of multimodal reasoning and knowledge synthesis in RAG systems. Code is available at https://github.com/ocean-luna/HMRAG.
CoDriveVLM: VLM-Enhanced Urban Cooperative Dispatching and Motion Planning for Future Autonomous Mobility on Demand Systems
Jan 10, 2025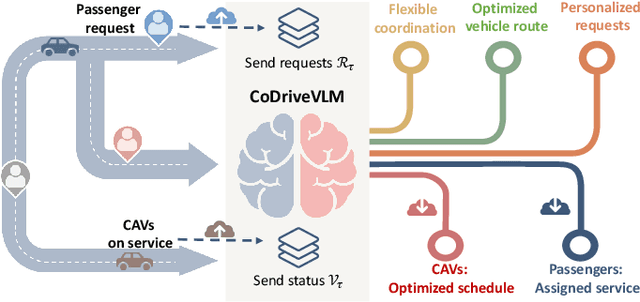



The increasing demand for flexible and efficient urban transportation solutions has spotlighted the limitations of traditional Demand Responsive Transport (DRT) systems, particularly in accommodating diverse passenger needs and dynamic urban environments. Autonomous Mobility-on-Demand (AMoD) systems have emerged as a promising alternative, leveraging connected and autonomous vehicles (CAVs) to provide responsive and adaptable services. However, existing methods primarily focus on either vehicle scheduling or path planning, which often simplify complex urban layouts and neglect the necessity for simultaneous coordination and mutual avoidance among CAVs. This oversimplification poses significant challenges to the deployment of AMoD systems in real-world scenarios. To address these gaps, we propose CoDriveVLM, a novel framework that integrates high-fidelity simultaneous dispatching and cooperative motion planning for future AMoD systems. Our method harnesses Vision-Language Models (VLMs) to enhance multi-modality information processing, and this enables comprehensive dispatching and collision risk evaluation. The VLM-enhanced CAV dispatching coordinator is introduced to effectively manage complex and unforeseen AMoD conditions, thus supporting efficient scheduling decision-making. Furthermore, we propose a scalable decentralized cooperative motion planning method via consensus alternating direction method of multipliers (ADMM) focusing on collision risk evaluation and decentralized trajectory optimization. Simulation results demonstrate the feasibility and robustness of CoDriveVLM in various traffic conditions, showcasing its potential to significantly improve the fidelity and effectiveness of AMoD systems in future urban transportation networks. The code is available at https://github.com/henryhcliu/CoDriveVLM.git.
CALMM-Drive: Confidence-Aware Autonomous Driving with Large Multimodal Model
Dec 05, 2024



Decision-making and motion planning are pivotal in ensuring the safety and efficiency of Autonomous Vehicles (AVs). Existing methodologies typically adopt two paradigms: decision then planning or generation then scoring. However, the former often struggles with misalignment between decisions and planning, while the latter encounters significant challenges in integrating short-term operational utility with long-term tactical efficacy. To address these issues, we introduce CALMM-Drive, a novel Confidence-Aware Large Multimodal Model (LMM) empowered Autonomous Driving framework. Our approach employs Top-K confidence elicitation, which facilitates the generation of multiple candidate decisions along with their confidence levels. Furthermore, we propose a novel planning module that integrates a diffusion model for trajectory generation and a hierarchical refinement process to find the optimal path. This framework enables the selection of the best plan accounting for both low-level solution quality and high-level tactical confidence, which mitigates the risks of one-shot decisions and overcomes the limitations induced by short-sighted scoring mechanisms. Comprehensive evaluations in nuPlan closed-loop simulation environments demonstrate the effectiveness of CALMM-Drive in achieving reliable and flexible driving performance, showcasing a significant advancement in the integration of uncertainty in LMM-empowered AVs. The code will be released upon acceptance.
LMMCoDrive: Cooperative Driving with Large Multimodal Model
Sep 18, 2024To address the intricate challenges of decentralized cooperative scheduling and motion planning in Autonomous Mobility-on-Demand (AMoD) systems, this paper introduces LMMCoDrive, a novel cooperative driving framework that leverages a Large Multimodal Model (LMM) to enhance traffic efficiency in dynamic urban environments. This framework seamlessly integrates scheduling and motion planning processes to ensure the effective operation of Cooperative Autonomous Vehicles (CAVs). The spatial relationship between CAVs and passenger requests is abstracted into a Bird's-Eye View (BEV) to fully exploit the potential of the LMM. Besides, trajectories are cautiously refined for each CAV while ensuring collision avoidance through safety constraints. A decentralized optimization strategy, facilitated by the Alternating Direction Method of Multipliers (ADMM) within the LMM framework, is proposed to drive the graph evolution of CAVs. Simulation results demonstrate the pivotal role and significant impact of LMM in optimizing CAV scheduling and enhancing decentralized cooperative optimization process for each vehicle. This marks a substantial stride towards achieving practical, efficient, and safe AMoD systems that are poised to revolutionize urban transportation. The code is available at https://github.com/henryhcliu/LMMCoDrive.