 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNetRoller: Interfacing General and Specialized Models for End-to-End Autonomous Driving
Jun 17, 2025Integrating General Models (GMs) such as Large Language Models (LLMs), with Specialized Models (SMs) in autonomous driving tasks presents a promising approach to mitigating challenges in data diversity and model capacity of existing specialized driving models. However, this integration leads to problems of asynchronous systems, which arise from the distinct characteristics inherent in GMs and SMs. To tackle this challenge, we propose NetRoller, an adapter that incorporates a set of novel mechanisms to facilitate the seamless integration of GMs and specialized driving models. Specifically, our mechanisms for interfacing the asynchronous GMs and SMs are organized into three key stages. NetRoller first harvests semantically rich and computationally efficient representations from the reasoning processes of LLMs using an early stopping mechanism, which preserves critical insights on driving context while maintaining low overhead. It then applies learnable query embeddings, nonsensical embeddings, and positional layer embeddings to facilitate robust and efficient cross-modality translation. At last, it employs computationally efficient Query Shift and Feature Shift mechanisms to enhance the performance of SMs through few-epoch fine-tuning. Based on the mechanisms formalized in these three stages, NetRoller enables specialized driving models to operate at their native frequencies while maintaining situational awareness of the GM. Experiments conducted on the nuScenes dataset demonstrate that integrating GM through NetRoller significantly improves human similarity and safety in planning tasks, and it also achieves noticeable precision improvements in detection and mapping tasks for end-to-end autonomous driving. The code and models are available at https://github.com/Rex-sys-hk/NetRoller .
DSDrive: Distilling Large Language Model for Lightweight End-to-End Autonomous Driving with Unified Reasoning and Planning
May 08, 2025We present DSDrive, a streamlined end-to-end paradigm tailored for integrating the reasoning and planning of autonomous vehicles into a unified framework. DSDrive leverages a compact LLM that employs a distillation method to preserve the enhanced reasoning capabilities of a larger-sized vision language model (VLM). To effectively align the reasoning and planning tasks, a waypoint-driven dual-head coordination module is further developed, which synchronizes dataset structures, optimization objectives, and the learning process. By integrating these tasks into a unified framework, DSDrive anchors on the planning results while incorporating detailed reasoning insights, thereby enhancing the interpretability and reliability of the end-to-end pipeline. DSDrive has been thoroughly tested in closed-loop simulations, where it performs on par with benchmark models and even outperforms in many key metrics, all while being more compact in size. Additionally, the computational efficiency of DSDrive (as reflected in its time and memory requirements during inference) has been significantly enhanced. Evidently thus, this work brings promising aspects and underscores the potential of lightweight systems in delivering interpretable and efficient solutions for AD.
CoDriveVLM: VLM-Enhanced Urban Cooperative Dispatching and Motion Planning for Future Autonomous Mobility on Demand Systems
Jan 10, 2025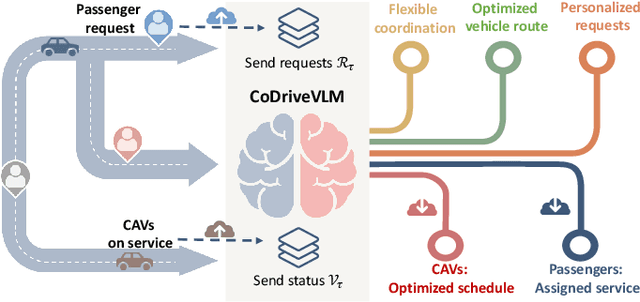



The increasing demand for flexible and efficient urban transportation solutions has spotlighted the limitations of traditional Demand Responsive Transport (DRT) systems, particularly in accommodating diverse passenger needs and dynamic urban environments. Autonomous Mobility-on-Demand (AMoD) systems have emerged as a promising alternative, leveraging connected and autonomous vehicles (CAVs) to provide responsive and adaptable services. However, existing methods primarily focus on either vehicle scheduling or path planning, which often simplify complex urban layouts and neglect the necessity for simultaneous coordination and mutual avoidance among CAVs. This oversimplification poses significant challenges to the deployment of AMoD systems in real-world scenarios. To address these gaps, we propose CoDriveVLM, a novel framework that integrates high-fidelity simultaneous dispatching and cooperative motion planning for future AMoD systems. Our method harnesses Vision-Language Models (VLMs) to enhance multi-modality information processing, and this enables comprehensive dispatching and collision risk evaluation. The VLM-enhanced CAV dispatching coordinator is introduced to effectively manage complex and unforeseen AMoD conditions, thus supporting efficient scheduling decision-making. Furthermore, we propose a scalable decentralized cooperative motion planning method via consensus alternating direction method of multipliers (ADMM) focusing on collision risk evaluation and decentralized trajectory optimization. Simulation results demonstrate the feasibility and robustness of CoDriveVLM in various traffic conditions, showcasing its potential to significantly improve the fidelity and effectiveness of AMoD systems in future urban transportation networks. The code is available at https://github.com/henryhcliu/CoDriveVLM.git.
Integrating Decision-Making Into Differentiable Optimization Guided Learning for End-to-End Planning of Autonomous Vehicles
Dec 02, 2024We address the decision-making capability within an end-to-end planning framework that focuses on motion prediction, decision-making, and trajectory planning. Specifically, we formulate decision-making and trajectory planning as a differentiable nonlinear optimization problem, which ensures compatibility with learning-based modules to establish an end-to-end trainable architecture. This optimization introduces explicit objectives related to safety, traveling efficiency, and riding comfort, guiding the learning process in our proposed pipeline. Intrinsic constraints resulting from the decision-making task are integrated into the optimization formulation and preserved throughout the learning process. By integrating the differentiable optimizer with a neural network predictor, the proposed framework is end-to-end trainable, aligning various driving tasks with ultimate performance goals defined by the optimization objectives. The proposed framework is trained and validated using the Waymo Open Motion dataset. The open-loop testing reveals that while the planning outcomes using our method do not always resemble the expert trajectory, they consistently outperform baseline approaches with improved safety, traveling efficiency, and riding comfort. The closed-loop testing further demonstrates the effectiveness of optimizing decisions and improving driving performance. Ablation studies demonstrate that the initialization provided by the learning-based prediction module is essential for the convergence of the optimizer as well as the overall driving performance.
Synergizing Decision Making and Trajectory Planning Using Two-Stage Optimization for Autonomous Vehicles
Nov 28, 2024



This paper introduces a local planner that synergizes the decision making and trajectory planning modules towards autonomous driving. The decision making and trajectory planning tasks are jointly formulated as a nonlinear programming problem with an integrated objective function. However, integrating the discrete decision variables into the continuous trajectory optimization leads to a mixed-integer programming (MIP) problem with inherent nonlinearity and nonconvexity. To address the challenge in solving the problem, the original problem is decomposed into two sub-stages, and a two-stage optimization (TSO) based approach is presented to ensure the coherence in outcomes for the two stages. The optimization problem in the first stage determines the optimal decision sequence that acts as an informed initialization. With the outputs from the first stage, the second stage necessitates the use of a high-fidelity vehicle model and strict enforcement of the collision avoidance constraints as part of the trajectory planning problem. We evaluate the effectiveness of our proposed planner across diverse multi-lane scenarios. The results demonstrate that the proposed planner simultaneously generates a sequence of optimal decisions and the corresponding trajectory that significantly improves driving performance in terms of driving safety and traveling efficiency as compared to alternative methods. Additionally, we implement the closed-loop simulation in CARLA, and the results showcase the effectiveness of the proposed planner to adapt to changing driving situations with high computational efficiency.
Integrated Intention Prediction and Decision-Making with Spectrum Attention Net and Proximal Policy Optimization
Aug 06, 2024



For autonomous driving in highly dynamic environments, it is anticipated to predict the future behaviors of surrounding vehicles (SVs) and make safe and effective decisions. However, modeling the inherent coupling effect between the prediction and decision-making modules has been a long-standing challenge, especially when there is a need to maintain appropriate computational efficiency. To tackle these problems, we propose a novel integrated intention prediction and decision-making approach, which explicitly models the coupling relationship and achieves efficient computation. Specifically, a spectrum attention net is designed to predict the intentions of SVs by capturing the trends of each frequency component over time and their interrelations. Fast computation of the intention prediction module is attained as the predicted intentions are not decoded to trajectories in the executing process. Furthermore, the proximal policy optimization (PPO) algorithm is employed to address the non-stationary problem in the framework through a modest policy update enabled by a clipping mechanism within its objective function. On the basis of these developments, the intention prediction and decision-making modules are integrated through joint learning. Experiments are conducted in representative traffic scenarios, and the results reveal that the proposed integrated framework demonstrates superior performance over several deep reinforcement learning (DRL) baselines in terms of success rate, efficiency, and safety in driving tasks.