 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLVDrive: Latent Visual Representation Enhanced Vision-Language-Action Autonomous Driving Model
May 21, 2026Vision-Language-Action (VLA) models have emerged as a promising framework for end-to-end autonomous driving. However, existing VLAs typically rely on sparse action supervision, which underutilizes their powerful scene understanding and reasoning capabilities. Recent attempts to incorporate dense visual supervision via world modeling often overemphasize pixel-level image reconstruction, neglecting semantically meaningful scene representation learning. In this work, we propose LVDrive, a Latent Visual representation enhanced VLA framework for autonomous driving. LVDrive introduces a future scene prediction task into the VLA paradigm, where future representations are learned entirely in a high-level latent space under auxiliary supervision from a pretrained vision backbone. Departing from inefficient autoregressive generation, we jointly model future scene and motion prediction within a unified embedding space, processed in a single forward pass to conduct the future-aware reasoning. We further design a two-stage trajectory decoding strategy that explicitly leverages the learned latent future representations to refine trajectory generation. Extensive experiments on the challenging Bench2Drive benchmark demonstrate that LVDrive achieves significant improvements in closed-loop driving performance, outperforming both action supervised methods and image-reconstruction-based world model approaches.
NetRoller: Interfacing General and Specialized Models for End-to-End Autonomous Driving
Jun 17, 2025Integrating General Models (GMs) such as Large Language Models (LLMs), with Specialized Models (SMs) in autonomous driving tasks presents a promising approach to mitigating challenges in data diversity and model capacity of existing specialized driving models. However, this integration leads to problems of asynchronous systems, which arise from the distinct characteristics inherent in GMs and SMs. To tackle this challenge, we propose NetRoller, an adapter that incorporates a set of novel mechanisms to facilitate the seamless integration of GMs and specialized driving models. Specifically, our mechanisms for interfacing the asynchronous GMs and SMs are organized into three key stages. NetRoller first harvests semantically rich and computationally efficient representations from the reasoning processes of LLMs using an early stopping mechanism, which preserves critical insights on driving context while maintaining low overhead. It then applies learnable query embeddings, nonsensical embeddings, and positional layer embeddings to facilitate robust and efficient cross-modality translation. At last, it employs computationally efficient Query Shift and Feature Shift mechanisms to enhance the performance of SMs through few-epoch fine-tuning. Based on the mechanisms formalized in these three stages, NetRoller enables specialized driving models to operate at their native frequencies while maintaining situational awareness of the GM. Experiments conducted on the nuScenes dataset demonstrate that integrating GM through NetRoller significantly improves human similarity and safety in planning tasks, and it also achieves noticeable precision improvements in detection and mapping tasks for end-to-end autonomous driving. The code and models are available at https://github.com/Rex-sys-hk/NetRoller .
HAMF: A Hybrid Attention-Mamba Framework for Joint Scene Context Understanding and Future Motion Representation Learning
May 21, 2025



Motion forecasting represents a critical challenge in autonomous driving systems, requiring accurate prediction of surrounding agents' future trajectories. While existing approaches predict future motion states with the extracted scene context feature from historical agent trajectories and road layouts, they suffer from the information degradation during the scene feature encoding. To address the limitation, we propose HAMF, a novel motion forecasting framework that learns future motion representations with the scene context encoding jointly, to coherently combine the scene understanding and future motion state prediction. We first embed the observed agent states and map information into 1D token sequences, together with the target multi-modal future motion features as a set of learnable tokens. Then we design a unified Attention-based encoder, which synergistically combines self-attention and cross-attention mechanisms to model the scene context information and aggregate future motion features jointly. Complementing the encoder, we implement the Mamba module in the decoding stage to further preserve the consistency and correlations among the learned future motion representations, to generate the accurate and diverse final trajectories. Extensive experiments on Argoverse 2 benchmark demonstrate that our hybrid Attention-Mamba model achieves state-of-the-art motion forecasting performance with the simple and lightweight architecture.
LHPF: Look back the History and Plan for the Future in Autonomous Driving
Nov 26, 2024Decision-making and planning in autonomous driving critically reflect the safety of the system, making effective planning imperative. Current imitation learning-based planning algorithms often merge historical trajectories with present observations to predict future candidate paths. However, these algorithms typically assess the current and historical plans independently, leading to discontinuities in driving intentions and an accumulation of errors with each step in a discontinuous plan. To tackle this challenge, this paper introduces LHPF, an imitation learning planner that integrates historical planning information. Our approach employs a historical intention aggregation module that pools historical planning intentions, which are then combined with a spatial query vector to decode the final planning trajectory. Furthermore, we incorporate a comfort auxiliary task to enhance the human-like quality of the driving behavior. Extensive experiments using both real-world and synthetic data demonstrate that LHPF not only surpasses existing advanced learning-based planners in planning performance but also marks the first instance of a purely learning-based planner outperforming the expert. Additionally, the application of the historical intention aggregation module across various backbones highlights the considerable potential of the proposed method. The code will be made publicly available.
Enhancing Campus Mobility: Achievements and Challenges of Autonomous Shuttle "Snow Lion''
Jan 17, 2024The rapid evolution of autonomous vehicles (AVs) has significantly influenced global transportation systems. In this context, we present ``Snow Lion'', an autonomous shuttle meticulously designed to revolutionize on-campus transportation, offering a safer and more efficient mobility solution for students, faculty, and visitors. The primary objective of this research is to enhance campus mobility by providing a reliable, efficient, and eco-friendly transportation solution that seamlessly integrates with existing infrastructure and meets the diverse needs of a university setting. To achieve this goal, we delve into the intricacies of the system design, encompassing sensing, perception, localization, planning, and control aspects. We evaluate the autonomous shuttle's performance in real-world scenarios, involving a 1146-kilometer road haul and the transportation of 442 passengers over a two-month period. These experiments demonstrate the effectiveness of our system and offer valuable insights into the intricate process of integrating an autonomous vehicle within campus shuttle operations. Furthermore, a thorough analysis of the lessons derived from this experience furnishes a valuable real-world case study, accompanied by recommendations for future research and development in the field of autonomous driving.
IR-STP: Enhancing Autonomous Driving with Interaction Reasoning in Spatio-Temporal Planning
Nov 06, 2023



Considerable research efforts have been devoted to the development of motion planning algorithms, which form a cornerstone of the autonomous driving system (ADS). However, obtaining an interactive and secure trajectory for the ADS remains a formidable task, especially in scenarios with significant interaction complexities. Many contemporary prediction-based planning methods frequently overlook interaction modeling, leading to less effective planning performance. This paper introduces a novel prediction-based interactive planning framework that explicitly and mathematically models interactions among traffic entities during the planning process. Our method incorporates interaction reasoning into spatio-temporal (s-t) planning by defining interaction conditions and constraints. Furthermore, it records and continually updates interaction relations for each planned state throughout the forward search. We assess the performance of our approach alongside state-of-the-art methods using a series of experiments conducted in both single and multi-modal scenarios. These experiments encompass variations in the accuracy of prediction outcomes and different degrees of planner aggressiveness. The experimental findings demonstrate the effectiveness and robustness of our method, yielding insights applicable to the wider field of autonomous driving. For the community's reference, our code is accessible at https://github.com/ChenYingbing/IR-STP-Planner.
Improving Autonomous Driving Safety with POP: A Framework for Accurate Partially Observed Trajectory Predictions
Sep 27, 2023



Accurate trajectory prediction is crucial for safe and efficient autonomous driving, but handling partial observations presents significant challenges. To address this, we propose a novel trajectory prediction framework called Partial Observations Prediction (POP) for congested urban road scenarios. The framework consists of two stages: self-supervised learning (SSL) and feature distillation. In SSL, a reconstruction branch reconstructs the hidden history of partial observations using a mask procedure and reconstruction head. The feature distillation stage transfers knowledge from a fully observed teacher model to a partially observed student model, improving prediction accuracy. POP achieves comparable results to top-performing methods in open-loop experiments and outperforms the baseline method in closed-loop simulations, including safety metrics. Qualitative results illustrate the superiority of POP in providing reasonable and safe trajectory predictions.
Rethinking Imitation-based Planner for Autonomous Driving
Sep 19, 2023In recent years, imitation-based driving planners have reported considerable success. However, due to the absence of a standardized benchmark, the effectiveness of various designs remains unclear. The newly released nuPlan addresses this issue by offering a large-scale real-world dataset and a standardized closed-loop benchmark for equitable comparisons. Utilizing this platform, we conduct a comprehensive study on two fundamental yet underexplored aspects of imitation-based planners: the essential features for ego planning and the effective data augmentation techniques to reduce compounding errors. Furthermore, we highlight an imitation gap that has been overlooked by current learning systems. Finally, integrating our findings, we propose a strong baseline model-PlanTF. Our results demonstrate that a well-designed, purely imitation-based planner can achieve highly competitive performance compared to state-of-the-art methods involving hand-crafted rules and exhibit superior generalization capabilities in long-tail cases. Our models and benchmarks are publicly available. Project website https://jchengai.github.io/planTF.
Forecast-MAE: Self-supervised Pre-training for Motion Forecasting with Masked Autoencoders
Aug 19, 2023This study explores the application of self-supervised learning (SSL) to the task of motion forecasting, an area that has not yet been extensively investigated despite the widespread success of SSL in computer vision and natural language processing. To address this gap, we introduce Forecast-MAE, an extension of the mask autoencoders framework that is specifically designed for self-supervised learning of the motion forecasting task. Our approach includes a novel masking strategy that leverages the strong interconnections between agents' trajectories and road networks, involving complementary masking of agents' future or history trajectories and random masking of lane segments. Our experiments on the challenging Argoverse 2 motion forecasting benchmark show that Forecast-MAE, which utilizes standard Transformer blocks with minimal inductive bias, achieves competitive performance compared to state-of-the-art methods that rely on supervised learning and sophisticated designs. Moreover, it outperforms the previous self-supervised learning method by a significant margin. Code is available at https://github.com/jchengai/forecast-mae.
Efficient Speed Planning for Autonomous Driving in Dynamic Environment with Interaction Point Model
Sep 25, 2022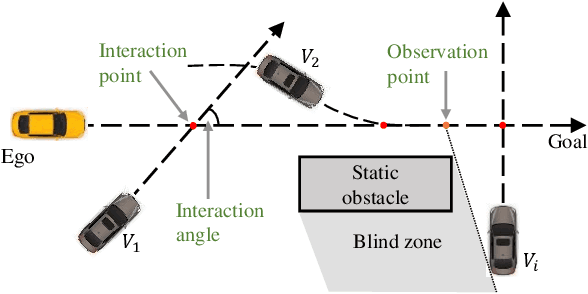
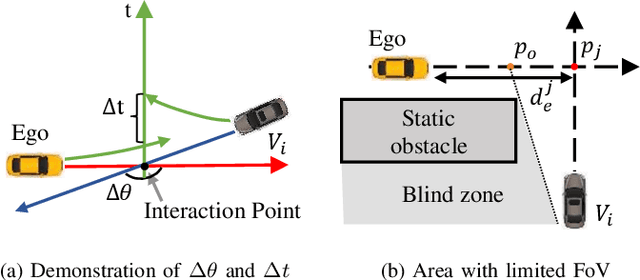
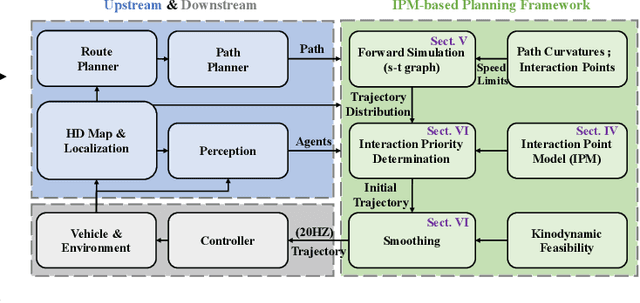
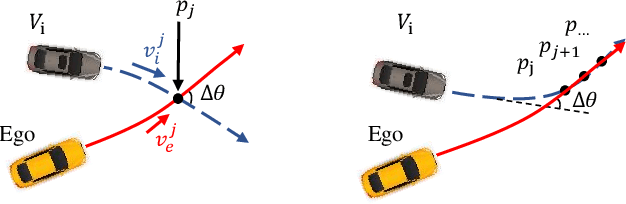
Safely interacting with other traffic participants is one of the core requirements for autonomous driving, especially in intersections and occlusions. Most existing approaches are designed for particular scenarios and require significant human labor in parameter tuning to be applied to different situations. To solve this problem, we first propose a learning-based Interaction Point Model (IPM), which describes the interaction between agents with the protection time and interaction priority in a unified manner. We further integrate the proposed IPM into a novel planning framework, demonstrating its effectiveness and robustness through comprehensive simulations in highly dynamic environments.