 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLucidFlux: Caption-Free Universal Image Restoration via a Large-Scale Diffusion Transformer
Sep 26, 2025



Universal image restoration (UIR) aims to recover images degraded by unknown mixtures while preserving semantics -- conditions under which discriminative restorers and UNet-based diffusion priors often oversmooth, hallucinate, or drift. We present LucidFlux, a caption-free UIR framework that adapts a large diffusion transformer (Flux.1) without image captions. LucidFlux introduces a lightweight dual-branch conditioner that injects signals from the degraded input and a lightly restored proxy to respectively anchor geometry and suppress artifacts. Then, a timestep- and layer-adaptive modulation schedule is designed to route these cues across the backbone's hierarchy, in order to yield coarse-to-fine and context-aware updates that protect the global structure while recovering texture. After that, to avoid the latency and instability of text prompts or MLLM captions, we enforce caption-free semantic alignment via SigLIP features extracted from the proxy. A scalable curation pipeline further filters large-scale data for structure-rich supervision. Across synthetic and in-the-wild benchmarks, LucidFlux consistently outperforms strong open-source and commercial baselines, and ablation studies verify the necessity of each component. LucidFlux shows that, for large DiTs, when, where, and what to condition on -- rather than adding parameters or relying on text prompts -- is the governing lever for robust and caption-free universal image restoration in the wild.
Real-Time Metric-Semantic Mapping for Autonomous Navigation in Outdoor Environments
Nov 30, 2024


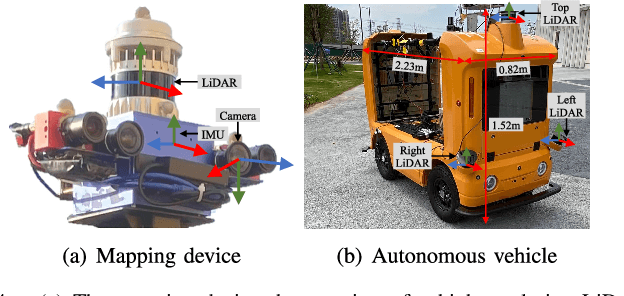
The creation of a metric-semantic map, which encodes human-prior knowledge, represents a high-level abstraction of environments. However, constructing such a map poses challenges related to the fusion of multi-modal sensor data, the attainment of real-time mapping performance, and the preservation of structural and semantic information consistency. In this paper, we introduce an online metric-semantic mapping system that utilizes LiDAR-Visual-Inertial sensing to generate a global metric-semantic mesh map of large-scale outdoor environments. Leveraging GPU acceleration, our mapping process achieves exceptional speed, with frame processing taking less than 7ms, regardless of scenario scale. Furthermore, we seamlessly integrate the resultant map into a real-world navigation system, enabling metric-semantic-based terrain assessment and autonomous point-to-point navigation within a campus environment. Through extensive experiments conducted on both publicly available and self-collected datasets comprising 24 sequences, we demonstrate the effectiveness of our mapping and navigation methodologies. Code has been publicly released: https://github.com/gogojjh/cobra
MGCBS: An Optimal and Efficient Algorithm for Solving Multi-Goal Multi-Agent Path Finding Problem
Apr 30, 2024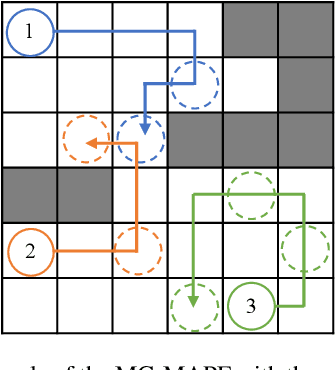
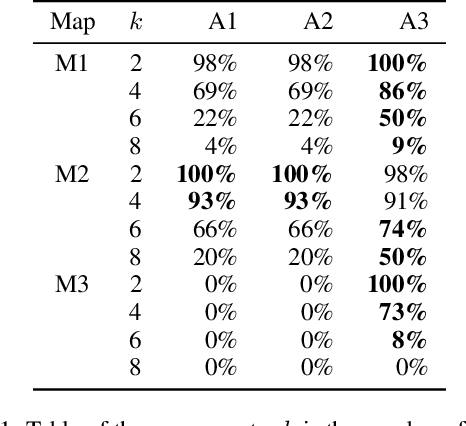
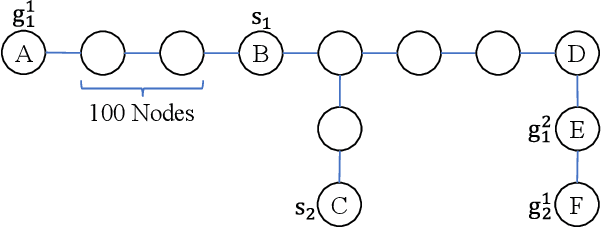
With the expansion of the scale of robotics applications, the multi-goal multi-agent pathfinding (MG-MAPF) problem began to gain widespread attention. This problem requires each agent to visit pre-assigned multiple goal points at least once without conflict. Some previous methods have been proposed to solve the MG-MAPF problem based on Decoupling the goal Vertex visiting order search and the Single-agent pathfinding (DVS). However, this paper demonstrates that the methods based on DVS cannot always obtain the optimal solution. To obtain the optimal result, we propose the Multi-Goal Conflict-Based Search (MGCBS), which is based on Decoupling the goal Safe interval visiting order search and the Single-agent pathfinding (DSS). Additionally, we present the Time-Interval-Space Forest (TIS Forest) to enhance the efficiency of MGCBS by maintaining the shortest paths from any start point at any start time step to each safe interval at the goal points. The experiment demonstrates that our method can consistently obtain optimal results and execute up to 7 times faster than the state-of-the-art method in our evaluation.
FusionPortableV2: A Unified Multi-Sensor Dataset for Generalized SLAM Across Diverse Platforms and Scalable Environments
Apr 12, 2024Simultaneous Localization and Mapping (SLAM) technology has been widely applied in various robotic scenarios, from rescue operations to autonomous driving. However, the generalization of SLAM algorithms remains a significant challenge, as current datasets often lack scalability in terms of platforms and environments. To address this limitation, we present FusionPortableV2, a multi-sensor SLAM dataset featuring notable sensor diversity, varied motion patterns, and a wide range of environmental scenarios. Our dataset comprises $27$ sequences, spanning over $2.5$ hours and collected from four distinct platforms: a handheld suite, wheeled and legged robots, and vehicles. These sequences cover diverse settings, including buildings, campuses, and urban areas, with a total length of $38.7km$. Additionally, the dataset includes ground-truth (GT) trajectories and RGB point cloud maps covering approximately $0.3km^2$. To validate the utility of our dataset in advancing SLAM research, we assess several state-of-the-art (SOTA) SLAM algorithms. Furthermore, we demonstrate the dataset's broad applicability beyond traditional SLAM tasks by investigating its potential for monocular depth estimation. The complete dataset, including sensor data, GT, and calibration details, is accessible at https://fusionportable.github.io/dataset/fusionportable_v2.
PALoc: Advancing SLAM Benchmarking with Prior-Assisted 6-DoF Trajectory Generation and Uncertainty Estimation
Feb 06, 2024


Accurately generating ground truth (GT) trajectories is essential for Simultaneous Localization and Mapping (SLAM) evaluation, particularly under varying environmental conditions. This study introduces a systematic approach employing a prior map-assisted framework for generating dense six-degree-of-freedom (6-DoF) GT poses for the first time, enhancing the fidelity of both indoor and outdoor SLAM datasets. Our method excels in handling degenerate and stationary conditions frequently encountered in SLAM datasets, thereby increasing robustness and precision. A significant aspect of our approach is the detailed derivation of covariances within the factor graph, enabling an in-depth analysis of pose uncertainty propagation. This analysis crucially contributes to demonstrating specific pose uncertainties and enhancing trajectory reliability from both theoretical and empirical perspectives. Additionally, we provide an open-source toolbox (https://github.com/JokerJohn/Cloud_Map_Evaluation) for map evaluation criteria, facilitating the indirect assessment of overall trajectory precision. Experimental results show at least a 30\% improvement in map accuracy and a 20\% increase in direct trajectory accuracy compared to the Iterative Closest Point (ICP) \cite{sharp2002icp} algorithm across diverse campus environments, with substantially enhanced robustness. Our open-source solution (https://github.com/JokerJohn/PALoc), extensively applied in the FusionPortable\cite{Jiao2022Mar} dataset, is geared towards SLAM benchmark dataset augmentation and represents a significant advancement in SLAM evaluations.
Enhancing Campus Mobility: Achievements and Challenges of Autonomous Shuttle "Snow Lion''
Jan 17, 2024The rapid evolution of autonomous vehicles (AVs) has significantly influenced global transportation systems. In this context, we present ``Snow Lion'', an autonomous shuttle meticulously designed to revolutionize on-campus transportation, offering a safer and more efficient mobility solution for students, faculty, and visitors. The primary objective of this research is to enhance campus mobility by providing a reliable, efficient, and eco-friendly transportation solution that seamlessly integrates with existing infrastructure and meets the diverse needs of a university setting. To achieve this goal, we delve into the intricacies of the system design, encompassing sensing, perception, localization, planning, and control aspects. We evaluate the autonomous shuttle's performance in real-world scenarios, involving a 1146-kilometer road haul and the transportation of 442 passengers over a two-month period. These experiments demonstrate the effectiveness of our system and offer valuable insights into the intricate process of integrating an autonomous vehicle within campus shuttle operations. Furthermore, a thorough analysis of the lessons derived from this experience furnishes a valuable real-world case study, accompanied by recommendations for future research and development in the field of autonomous driving.
Quantifying intra-tumoral genetic heterogeneity of glioblastoma toward precision medicine using MRI and a data-inclusive machine learning algorithm
Dec 30, 2023
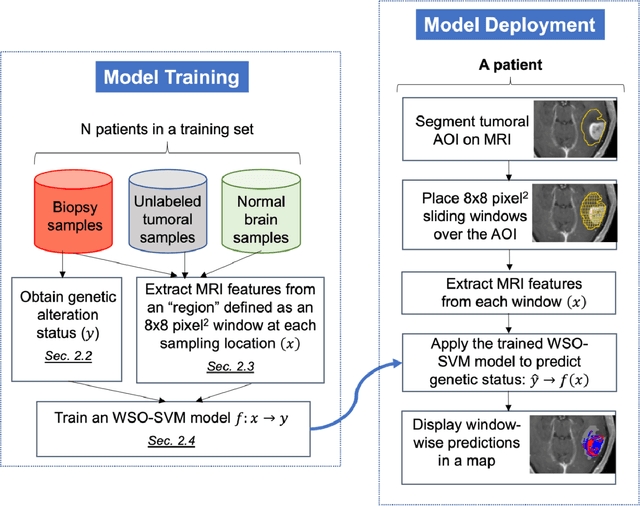


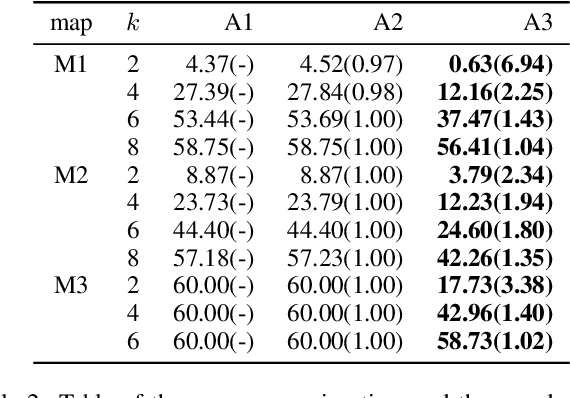
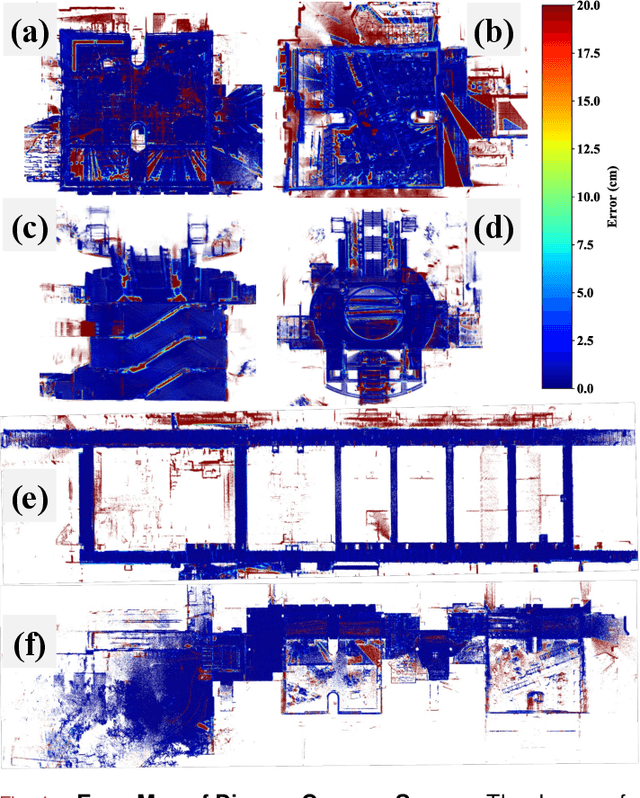
Glioblastoma (GBM) is one of the most aggressive and lethal human cancers. Intra-tumoral genetic heterogeneity poses a significant challenge for treatment. Biopsy is invasive, which motivates the development of non-invasive, MRI-based machine learning (ML) models to quantify intra-tumoral genetic heterogeneity for each patient. This capability holds great promise for enabling better therapeutic selection to improve patient outcomes. We proposed a novel Weakly Supervised Ordinal Support Vector Machine (WSO-SVM) to predict regional genetic alteration status within each GBM tumor using MRI. WSO-SVM was applied to a unique dataset of 318 image-localized biopsies with spatially matched multiparametric MRI from 74 GBM patients. The model was trained to predict the regional genetic alteration of three GBM driver genes (EGFR, PDGFRA, and PTEN) based on features extracted from the corresponding region of five MRI contrast images. For comparison, a variety of existing ML algorithms were also applied. The classification accuracy of each gene was compared between the different algorithms. The SHapley Additive exPlanations (SHAP) method was further applied to compute contribution scores of different contrast images. Finally, the trained WSO-SVM was used to generate prediction maps within the tumoral area of each patient to help visualize the intra-tumoral genetic heterogeneity. This study demonstrated the feasibility of using MRI and WSO-SVM to enable non-invasive prediction of intra-tumoral regional genetic alteration for each GBM patient, which can inform future adaptive therapies for individualized oncology.
A Novel Hybrid Ordinal Learning Model with Health Care Application
Dec 15, 2023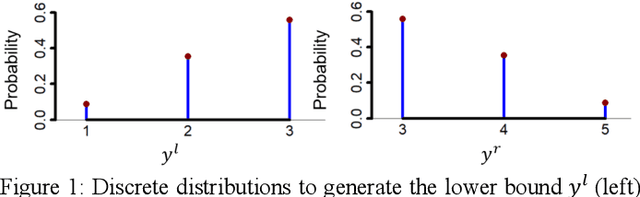
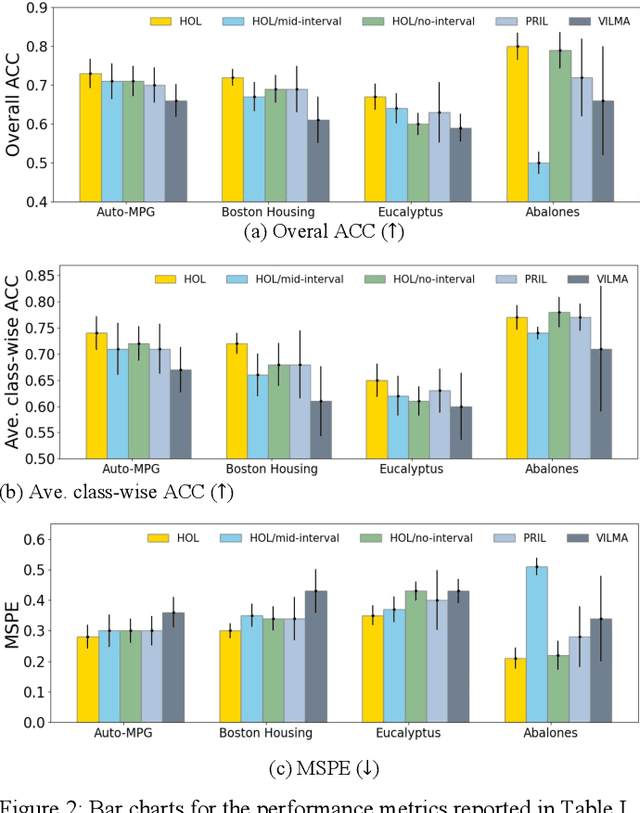
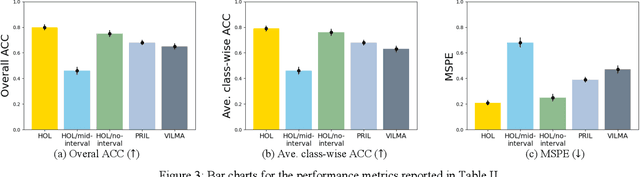
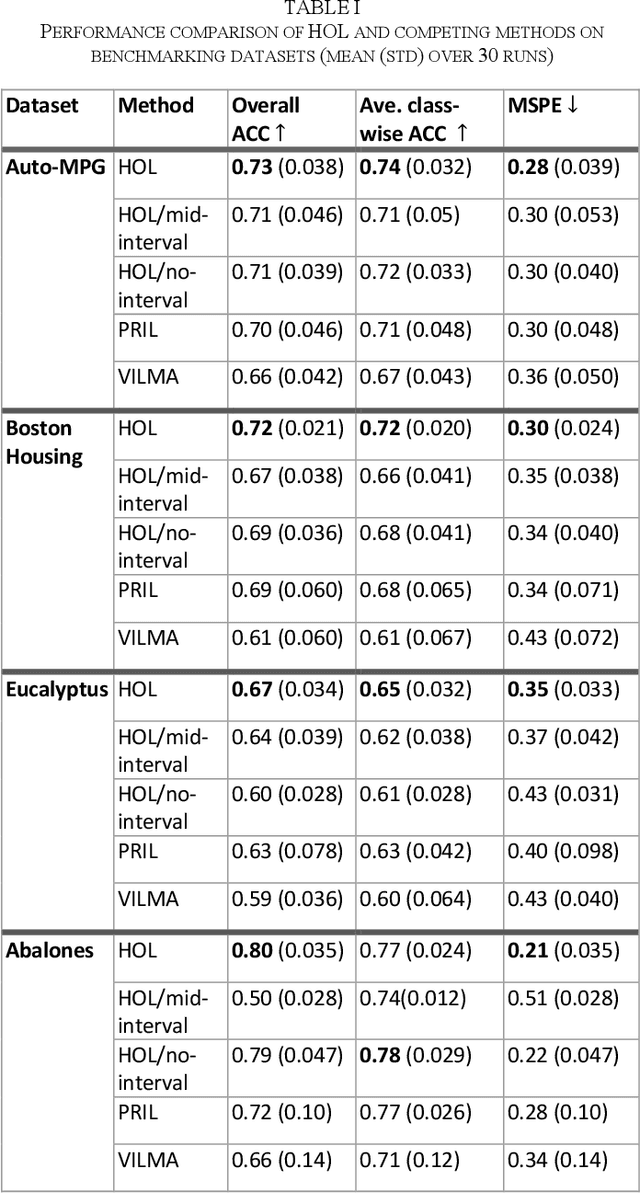
Ordinal learning (OL) is a type of machine learning models with broad utility in health care applications such as diagnosis of different grades of a disease (e.g., mild, modest, severe) and prediction of the speed of disease progression (e.g., very fast, fast, moderate, slow). This paper aims to tackle a situation when precisely labeled samples are limited in the training set due to cost or availability constraints, whereas there could be an abundance of samples with imprecise labels. We focus on imprecise labels that are intervals, i.e., one can know that a sample belongs to an interval of labels but cannot know which unique label it has. This situation is quite common in health care datasets due to limitations of the diagnostic instrument, sparse clinical visits, or/and patient dropout. Limited research has been done to develop OL models with imprecise/interval labels. We propose a new Hybrid Ordinal Learner (HOL) to integrate samples with both precise and interval labels to train a robust OL model. We also develop a tractable and efficient optimization algorithm to solve the HOL formulation. We compare HOL with several recently developed OL methods on four benchmarking datasets, which demonstrate the superior performance of HOL. Finally, we apply HOL to a real-world dataset for predicting the speed of progressing to Alzheimer's Disease (AD) for individuals with Mild Cognitive Impairment (MCI) based on a combination of multi-modality neuroimaging and demographic/clinical datasets. HOL achieves high accuracy in the prediction and outperforms existing methods. The capability of accurately predicting the speed of progression to AD for each individual with MCI has the potential for helping facilitate more individually-optimized interventional strategies.
A Dynamic Points Removal Benchmark in Point Cloud Maps
Jul 14, 2023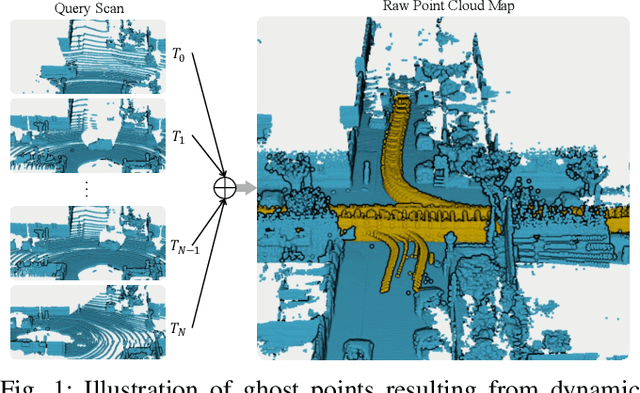


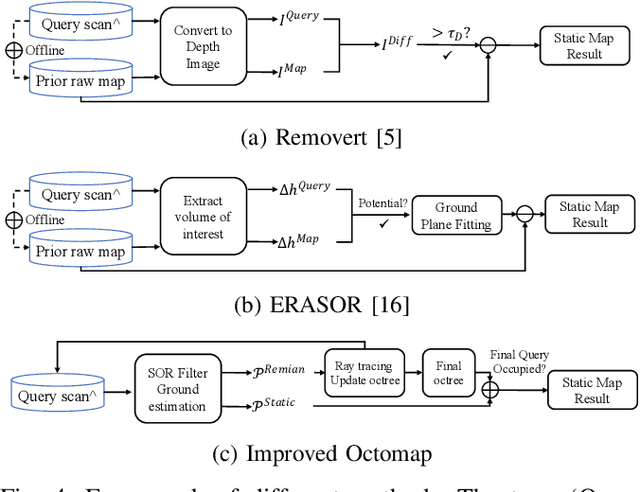
In the field of robotics, the point cloud has become an essential map representation. From the perspective of downstream tasks like localization and global path planning, points corresponding to dynamic objects will adversely affect their performance. Existing methods for removing dynamic points in point clouds often lack clarity in comparative evaluations and comprehensive analysis. Therefore, we propose an easy-to-extend unified benchmarking framework for evaluating techniques for removing dynamic points in maps. It includes refactored state-of-art methods and novel metrics to analyze the limitations of these approaches. This enables researchers to dive deep into the underlying reasons behind these limitations. The benchmark makes use of several datasets with different sensor types. All the code and datasets related to our study are publicly available for further development and utilization.
FSNet: Redesign Self-Supervised MonoDepth for Full-Scale Depth Prediction for Autonomous Driving
Apr 21, 2023Predicting accurate depth with monocular images is important for low-cost robotic applications and autonomous driving. This study proposes a comprehensive self-supervised framework for accurate scale-aware depth prediction on autonomous driving scenes utilizing inter-frame poses obtained from inertial measurements. In particular, we introduce a Full-Scale depth prediction network named FSNet. FSNet contains four important improvements over existing self-supervised models: (1) a multichannel output representation for stable training of depth prediction in driving scenarios, (2) an optical-flow-based mask designed for dynamic object removal, (3) a self-distillation training strategy to augment the training process, and (4) an optimization-based post-processing algorithm in test time, fusing the results from visual odometry. With this framework, robots and vehicles with only one well-calibrated camera can collect sequences of training image frames and camera poses, and infer accurate 3D depths of the environment without extra labeling work or 3D data. Extensive experiments on the KITTI dataset, KITTI-360 dataset and the nuScenes dataset demonstrate the potential of FSNet. More visualizations are presented in \url{https://sites.google.com/view/fsnet/home}