 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHAMF: A Hybrid Attention-Mamba Framework for Joint Scene Context Understanding and Future Motion Representation Learning
May 21, 2025



Motion forecasting represents a critical challenge in autonomous driving systems, requiring accurate prediction of surrounding agents' future trajectories. While existing approaches predict future motion states with the extracted scene context feature from historical agent trajectories and road layouts, they suffer from the information degradation during the scene feature encoding. To address the limitation, we propose HAMF, a novel motion forecasting framework that learns future motion representations with the scene context encoding jointly, to coherently combine the scene understanding and future motion state prediction. We first embed the observed agent states and map information into 1D token sequences, together with the target multi-modal future motion features as a set of learnable tokens. Then we design a unified Attention-based encoder, which synergistically combines self-attention and cross-attention mechanisms to model the scene context information and aggregate future motion features jointly. Complementing the encoder, we implement the Mamba module in the decoding stage to further preserve the consistency and correlations among the learned future motion representations, to generate the accurate and diverse final trajectories. Extensive experiments on Argoverse 2 benchmark demonstrate that our hybrid Attention-Mamba model achieves state-of-the-art motion forecasting performance with the simple and lightweight architecture.
Establishing Reality-Virtuality Interconnections in Urban Digital Twins for Superior Intelligent Road Inspection
Dec 23, 2024



Road inspection is essential for ensuring road maintenance and traffic safety, as road defects gradually emerge and compromise road functionality. Traditional methods, which rely on manual evaluations, are labor-intensive, costly, and time-consuming. Although data-driven approaches are gaining traction, the scarcity and spatial sparsity of road defects in the real world pose significant challenges in acquiring high-quality datasets. Existing simulators designed to generate detailed synthetic driving scenes, however, lack models for road defects. Furthermore, advanced driving tasks involving interactions with road surfaces, such as planning and control in defective areas, remain underexplored. To address these limitations, we propose a system based on Urban Digital Twin (UDT) technology for intelligent road inspection. First, hierarchical road models are constructed from real-world driving data, creating highly detailed representations of road defect structures and surface elevations. Next, digital road twins are generated to create simulation environments for comprehensive analysis and evaluation. These scenarios are subsequently imported into a simulator to enable both data acquisition and physical simulation. Experimental results demonstrate that driving tasks, including perception and decision-making, can be significantly improved using the high-fidelity road defect scenes generated by our system.
RiskMap: A Unified Driving Context Representation for Autonomous Motion Planning in Urban Driving Environment
Jun 06, 2024Planning is complicated by the combination of perception and map information, particularly when driving in heavy traffic. Developing an extendable and efficient representation that visualizes sensor noise and provides constraints to real-time planning tasks is desirable. We aim to develop an extendable map representation offering prior to cost in planning tasks to simplify the planning process of dealing with complex driving scenarios and visualize sensor noise. In this paper, we illustrate a unified context representation empowered by a modern deep learning motion prediction model, representing statistical cognition of motion prediction for human beings. A sampling-based planner is adopted to train and compare the difference in risk map generation methods. The training tools and model structures are investigated illustrating their efficiency in this task.
MGCBS: An Optimal and Efficient Algorithm for Solving Multi-Goal Multi-Agent Path Finding Problem
Apr 30, 2024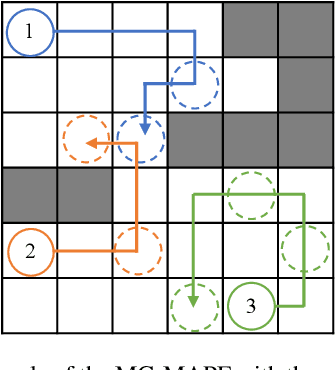
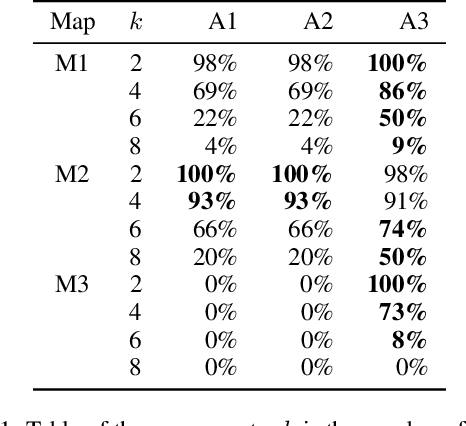
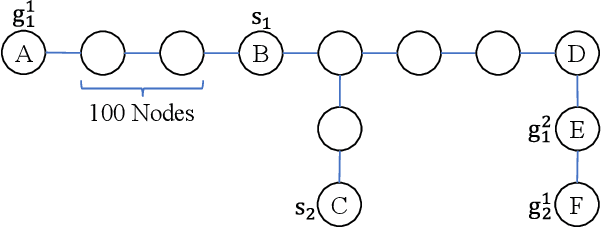
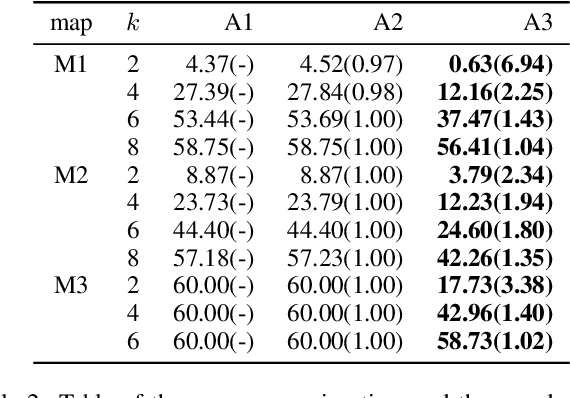
With the expansion of the scale of robotics applications, the multi-goal multi-agent pathfinding (MG-MAPF) problem began to gain widespread attention. This problem requires each agent to visit pre-assigned multiple goal points at least once without conflict. Some previous methods have been proposed to solve the MG-MAPF problem based on Decoupling the goal Vertex visiting order search and the Single-agent pathfinding (DVS). However, this paper demonstrates that the methods based on DVS cannot always obtain the optimal solution. To obtain the optimal result, we propose the Multi-Goal Conflict-Based Search (MGCBS), which is based on Decoupling the goal Safe interval visiting order search and the Single-agent pathfinding (DSS). Additionally, we present the Time-Interval-Space Forest (TIS Forest) to enhance the efficiency of MGCBS by maintaining the shortest paths from any start point at any start time step to each safe interval at the goal points. The experiment demonstrates that our method can consistently obtain optimal results and execute up to 7 times faster than the state-of-the-art method in our evaluation.
PLUTO: Pushing the Limit of Imitation Learning-based Planning for Autonomous Driving
Apr 22, 2024



We present PLUTO, a powerful framework that pushes the limit of imitation learning-based planning for autonomous driving. Our improvements stem from three pivotal aspects: a longitudinal-lateral aware model architecture that enables flexible and diverse driving behaviors; An innovative auxiliary loss computation method that is broadly applicable and efficient for batch-wise calculation; A novel training framework that leverages contrastive learning, augmented by a suite of new data augmentations to regulate driving behaviors and facilitate the understanding of underlying interactions. We assessed our framework using the large-scale real-world nuPlan dataset and its associated standardized planning benchmark. Impressively, PLUTO achieves state-of-the-art closed-loop performance, beating other competing learning-based methods and surpassing the current top-performed rule-based planner for the first time. Results and code are available at https://jchengai.github.io/pluto.
A Generic Trajectory Planning Method for Constrained All-Wheel-Steering Robots
Apr 15, 2024This paper presents a trajectory planning method for wheeled robots with fixed steering axes while the steering angle of each wheel is constrained. In the past, All-Wheel-Steering(AWS) robots, incorporating modes such as rotation-free translation maneuvers, in-situ rotational maneuvers, and proportional steering, exhibited inefficient performance due to time-consuming mode switches. This inefficiency arises from wheel rotation constraints and inter-wheel cooperation requirements. The direct application of a holonomic moving strategy can lead to significant slip angles or even structural failure. Additionally, the limited steering range of AWS wheeled robots exacerbates nonlinearity issues, thereby complicating control processes. To address these challenges, we developed a novel planning method termed Constrained AWS(C-AWS), which integrates second-order discrete search with predictive control techniques. Experimental results demonstrate that our method adeptly generates feasible and smooth trajectories for C-AWS while adhering to steering angle constraints.
Enhancing Campus Mobility: Achievements and Challenges of Autonomous Shuttle "Snow Lion''
Jan 17, 2024The rapid evolution of autonomous vehicles (AVs) has significantly influenced global transportation systems. In this context, we present ``Snow Lion'', an autonomous shuttle meticulously designed to revolutionize on-campus transportation, offering a safer and more efficient mobility solution for students, faculty, and visitors. The primary objective of this research is to enhance campus mobility by providing a reliable, efficient, and eco-friendly transportation solution that seamlessly integrates with existing infrastructure and meets the diverse needs of a university setting. To achieve this goal, we delve into the intricacies of the system design, encompassing sensing, perception, localization, planning, and control aspects. We evaluate the autonomous shuttle's performance in real-world scenarios, involving a 1146-kilometer road haul and the transportation of 442 passengers over a two-month period. These experiments demonstrate the effectiveness of our system and offer valuable insights into the intricate process of integrating an autonomous vehicle within campus shuttle operations. Furthermore, a thorough analysis of the lessons derived from this experience furnishes a valuable real-world case study, accompanied by recommendations for future research and development in the field of autonomous driving.
IR-STP: Enhancing Autonomous Driving with Interaction Reasoning in Spatio-Temporal Planning
Nov 06, 2023



Considerable research efforts have been devoted to the development of motion planning algorithms, which form a cornerstone of the autonomous driving system (ADS). However, obtaining an interactive and secure trajectory for the ADS remains a formidable task, especially in scenarios with significant interaction complexities. Many contemporary prediction-based planning methods frequently overlook interaction modeling, leading to less effective planning performance. This paper introduces a novel prediction-based interactive planning framework that explicitly and mathematically models interactions among traffic entities during the planning process. Our method incorporates interaction reasoning into spatio-temporal (s-t) planning by defining interaction conditions and constraints. Furthermore, it records and continually updates interaction relations for each planned state throughout the forward search. We assess the performance of our approach alongside state-of-the-art methods using a series of experiments conducted in both single and multi-modal scenarios. These experiments encompass variations in the accuracy of prediction outcomes and different degrees of planner aggressiveness. The experimental findings demonstrate the effectiveness and robustness of our method, yielding insights applicable to the wider field of autonomous driving. For the community's reference, our code is accessible at https://github.com/ChenYingbing/IR-STP-Planner.
Improving Autonomous Driving Safety with POP: A Framework for Accurate Partially Observed Trajectory Predictions
Sep 27, 2023



Accurate trajectory prediction is crucial for safe and efficient autonomous driving, but handling partial observations presents significant challenges. To address this, we propose a novel trajectory prediction framework called Partial Observations Prediction (POP) for congested urban road scenarios. The framework consists of two stages: self-supervised learning (SSL) and feature distillation. In SSL, a reconstruction branch reconstructs the hidden history of partial observations using a mask procedure and reconstruction head. The feature distillation stage transfers knowledge from a fully observed teacher model to a partially observed student model, improving prediction accuracy. POP achieves comparable results to top-performing methods in open-loop experiments and outperforms the baseline method in closed-loop simulations, including safety metrics. Qualitative results illustrate the superiority of POP in providing reasonable and safe trajectory predictions.
Rethinking Imitation-based Planner for Autonomous Driving
Sep 19, 2023In recent years, imitation-based driving planners have reported considerable success. However, due to the absence of a standardized benchmark, the effectiveness of various designs remains unclear. The newly released nuPlan addresses this issue by offering a large-scale real-world dataset and a standardized closed-loop benchmark for equitable comparisons. Utilizing this platform, we conduct a comprehensive study on two fundamental yet underexplored aspects of imitation-based planners: the essential features for ego planning and the effective data augmentation techniques to reduce compounding errors. Furthermore, we highlight an imitation gap that has been overlooked by current learning systems. Finally, integrating our findings, we propose a strong baseline model-PlanTF. Our results demonstrate that a well-designed, purely imitation-based planner can achieve highly competitive performance compared to state-of-the-art methods involving hand-crafted rules and exhibit superior generalization capabilities in long-tail cases. Our models and benchmarks are publicly available. Project website https://jchengai.github.io/planTF.