 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust MITL planning under uncertain navigation times
Mar 06, 2024



In environments like offices, the duration of a robot's navigation between two locations may vary over time. For instance, reaching a kitchen may take more time during lunchtime since the corridors are crowded with people heading the same way. In this work, we address the problem of routing in such environments with tasks expressed in Metric Interval Temporal Logic (MITL) - a rich robot task specification language that allows us to capture explicit time requirements. Our objective is to find a strategy that maximizes the temporal robustness of the robot's MITL task. As the first step towards a solution, we define a Mixed-integer linear programming approach to solving the task planning problem over a Varying Weighted Transition System, where navigation durations are deterministic but vary depending on the time of day. Then, we apply this planner to optimize for MITL temporal robustness in Markov Decision Processes, where the navigation durations between physical locations are uncertain, but the time-dependent distribution over possible delays is known. Finally, we develop a receding horizon planner for Markov Decision Processes that preserves guarantees over MITL temporal robustness. We show the scalability of our planning algorithms in simulations of robotic tasks.
DUFOMap: Efficient Dynamic Awareness Mapping
Mar 03, 2024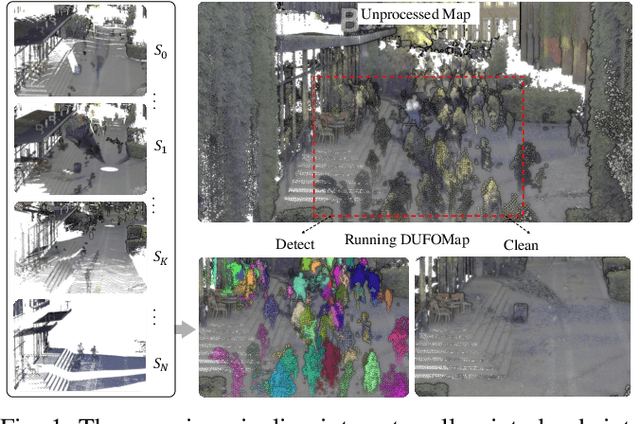
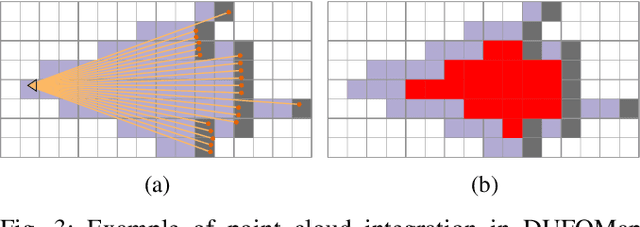
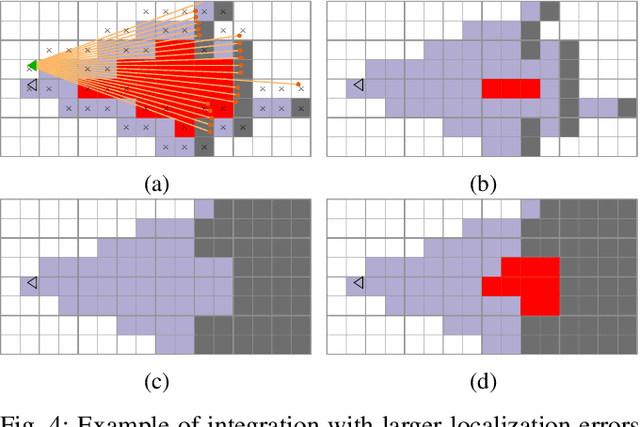
The dynamic nature of the real world is one of the main challenges in robotics. The first step in dealing with it is to detect which parts of the world are dynamic. A typical benchmark task is to create a map that contains only the static part of the world to support, for example, localization and planning. Current solutions are often applied in post-processing, where parameter tuning allows the user to adjust the setting for a specific dataset. In this paper, we propose DUFOMap, a novel dynamic awareness mapping framework designed for efficient online processing. Despite having the same parameter settings for all scenarios, it performs better or is on par with state-of-the-art methods. Ray casting is utilized to identify and classify fully observed empty regions. Since these regions have been observed empty, it follows that anything inside them at another time must be dynamic. Evaluation is carried out in various scenarios, including outdoor environments in KITTI and Argoverse 2, open areas on the KTH campus, and with different sensor types. DUFOMap outperforms the state of the art in terms of accuracy and computational efficiency. The source code, benchmarks, and links to the datasets utilized are provided. See https://kin-zhang.github.io/dufomap for more details.
A Dynamic Points Removal Benchmark in Point Cloud Maps
Jul 14, 2023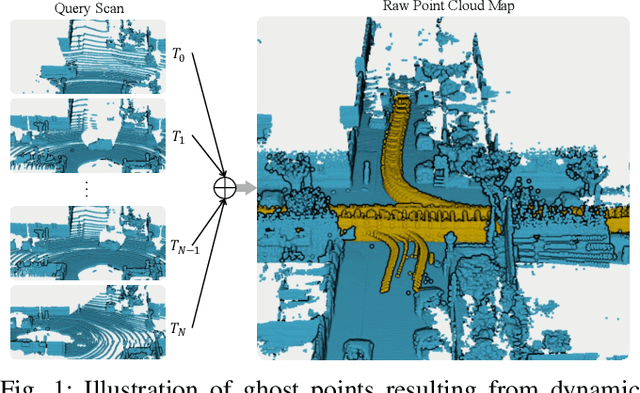


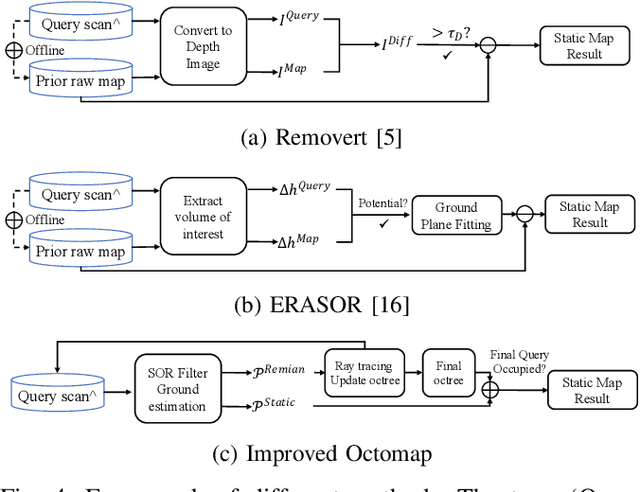
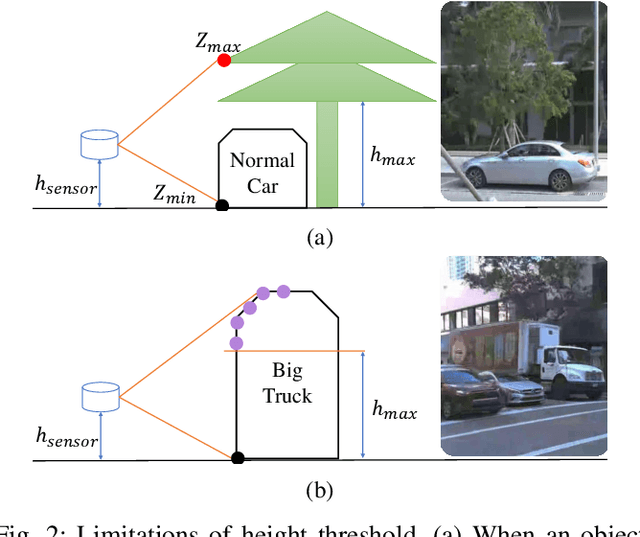
In the field of robotics, the point cloud has become an essential map representation. From the perspective of downstream tasks like localization and global path planning, points corresponding to dynamic objects will adversely affect their performance. Existing methods for removing dynamic points in point clouds often lack clarity in comparative evaluations and comprehensive analysis. Therefore, we propose an easy-to-extend unified benchmarking framework for evaluating techniques for removing dynamic points in maps. It includes refactored state-of-art methods and novel metrics to analyze the limitations of these approaches. This enables researchers to dive deep into the underlying reasons behind these limitations. The benchmark makes use of several datasets with different sensor types. All the code and datasets related to our study are publicly available for further development and utilization.
Semantic 3D Grid Maps for Autonomous Driving
Nov 09, 2022Maps play a key role in rapidly developing area of autonomous driving. We survey the literature for different map representations and find that while the world is three-dimensional, it is common to rely on 2D map representations in order to meet real-time constraints. We believe that high levels of situation awareness require a 3D representation as well as the inclusion of semantic information. We demonstrate that our recently presented hierarchical 3D grid mapping framework UFOMap meets the real-time constraints. Furthermore, we show how it can be used to efficiently support more complex functions such as calculating the occluded parts of space and accumulating the output from a semantic segmentation network.
SLICT: Multi-input Multi-scale Surfel-Based Lidar-Inertial Continuous-Time Odometry and Mapping
Nov 09, 2022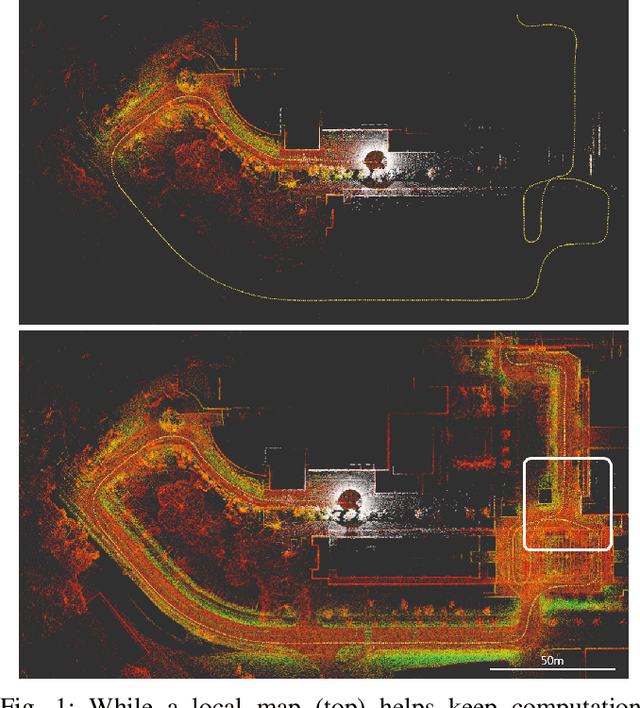
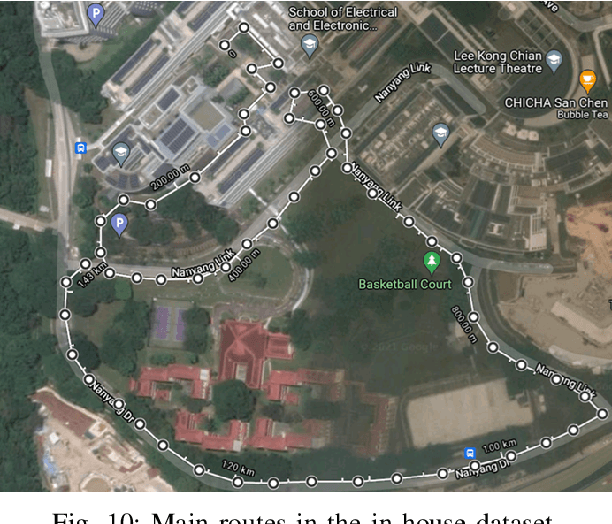
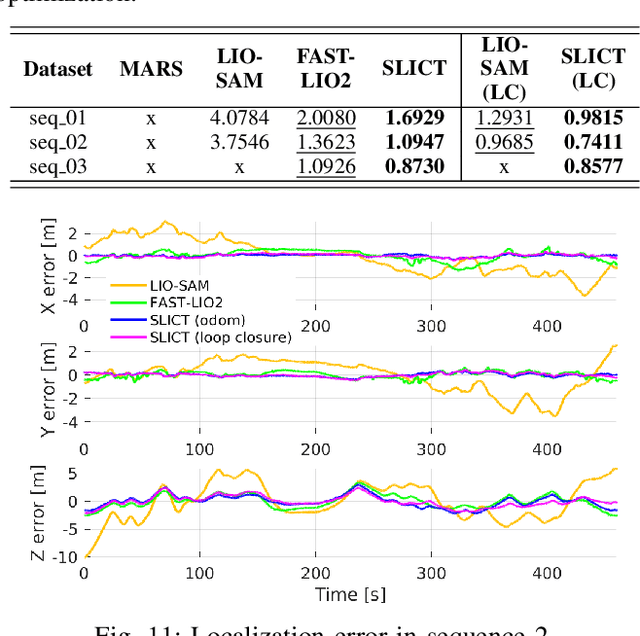
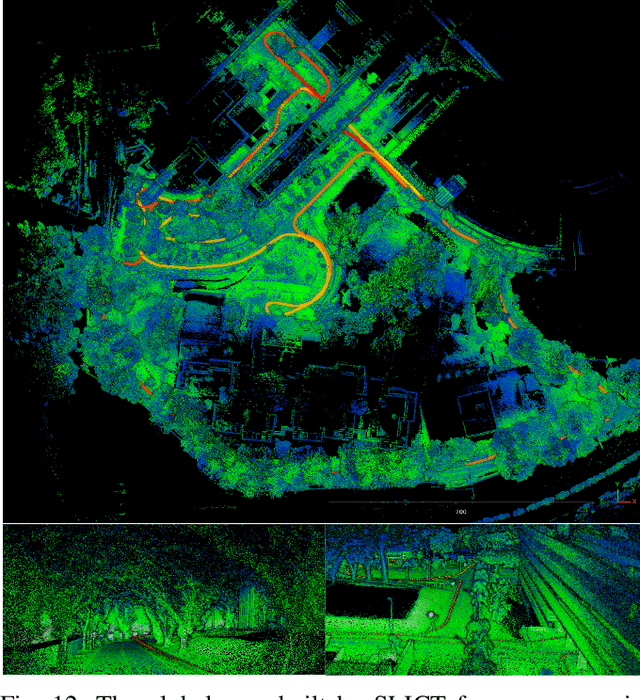
While feature association to a global map has significant benefits, to keep the computations from growing exponentially, most lidar-based odometry and mapping methods opt to associate features with local maps at one voxel scale. Taking advantage of the fact that surfels (surface elements) at different voxel scales can be organized in a tree-like structure, we propose an octree-based global map of multi-scale surfels that can be updated incrementally. This alleviates the need for recalculating, for example, a k-d tree of the whole map repeatedly. The system can also take input from a single or a number of sensors, reinforcing the robustness in degenerate cases. We also propose a point-to-surfel (PTS) association scheme, continuous-time optimization on PTS and IMU preintegration factors, along with loop closure and bundle adjustment, making a complete framework for Lidar-Inertial continuous-time odometry and mapping. Experiments on public and in-house datasets demonstrate the advantages of our system compared to other state-of-the-art methods. To benefit the community, we release the source code and dataset at https://github.com/brytsknguyen/slict.
UFOMap: An Efficient Probabilistic 3D Mapping Framework That Embraces the Unknown
Mar 10, 2020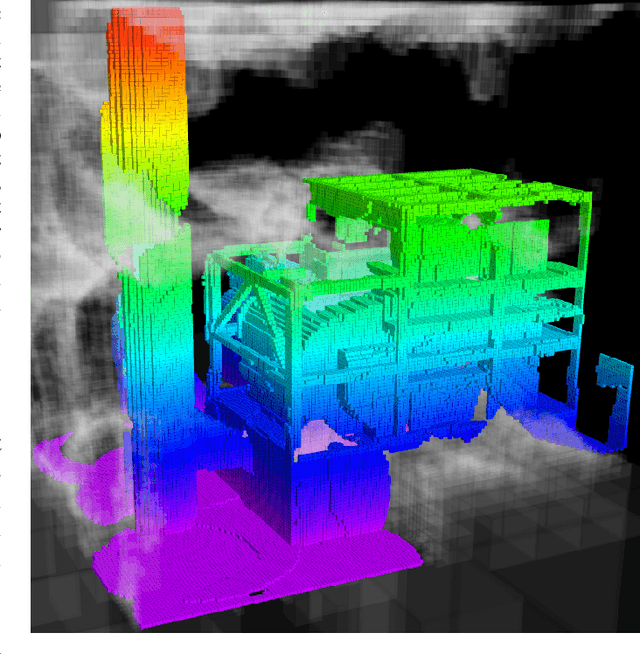
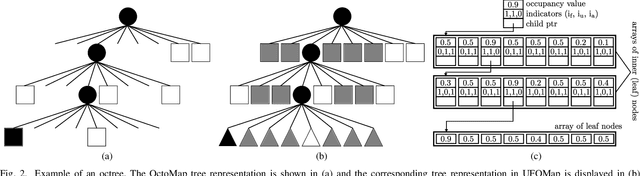

3D models are an essential part of many robotic applications. In applications where the environment is unknown a-priori, or where only a part of the environment is known, it is important that the 3D model can handle the unknown space efficiently. Path planning, exploration, and reconstruction all fall into this category. In this paper we present an extension to OctoMap which we call UFOMap. UFOMap uses an explicit representation of all three states in the map, i.e., occupied, free, and unknown. This gives, surprisingly, a more memory efficient representation. Furthermore, we provide methods that allow for significantly faster insertions into the octree. This enables real-time colored volumetric mapping at high resolution (below 1 cm). UFOMap is contributed as a C++ library that can be used standalone but is also integrated into ROS.