 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDUFOMap: Efficient Dynamic Awareness Mapping
Mar 03, 2024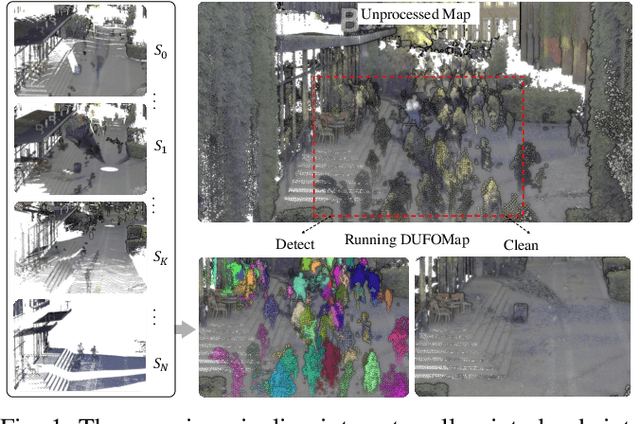
The dynamic nature of the real world is one of the main challenges in robotics. The first step in dealing with it is to detect which parts of the world are dynamic. A typical benchmark task is to create a map that contains only the static part of the world to support, for example, localization and planning. Current solutions are often applied in post-processing, where parameter tuning allows the user to adjust the setting for a specific dataset. In this paper, we propose DUFOMap, a novel dynamic awareness mapping framework designed for efficient online processing. Despite having the same parameter settings for all scenarios, it performs better or is on par with state-of-the-art methods. Ray casting is utilized to identify and classify fully observed empty regions. Since these regions have been observed empty, it follows that anything inside them at another time must be dynamic. Evaluation is carried out in various scenarios, including outdoor environments in KITTI and Argoverse 2, open areas on the KTH campus, and with different sensor types. DUFOMap outperforms the state of the art in terms of accuracy and computational efficiency. The source code, benchmarks, and links to the datasets utilized are provided. See https://kin-zhang.github.io/dufomap for more details.