 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Universal Multi-Vehicle Cooperative Decision-Making Approach in Structured Roads by Mixed-Integer Potential Game
Paper and Code
Sep 24, 2024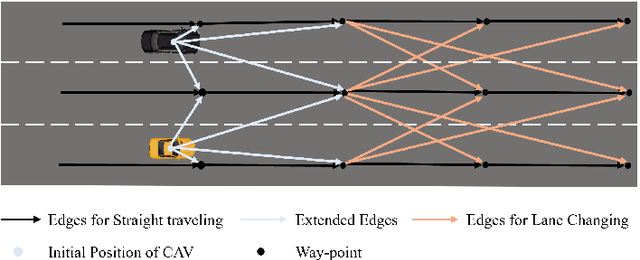
Due to the intricate of real-world road topologies and the inherent complexity of autonomous vehicles, cooperative decision-making for multiple connected autonomous vehicles (CAVs) remains a significant challenge. Currently, most methods are tailored to specific scenarios, and the efficiency of existing optimization and learning methods applicable to diverse scenarios is hindered by the complexity of modeling and data dependency, which limit their real-world applicability. To address these issues, this paper proposes a universal multi-vehicle cooperative decision-making method in structured roads with game theory. We transform the decision-making problem into a graph path searching problem within a way-point graph framework. The problem is formulated as a mixed-integer linear programming problem (MILP) first and transformed into a mixed-integer potential game (MIPG), which reduces the scope of problem and ensures that no player needs to sacrifice for the overall cost. Two Gauss-Seidel algorithms for cooperative decision-making are presented to solve the MIPG problem and obtain the Nash equilibrium solutions. Specifically, the sequential Gauss-Seidel algorithm for cooperative decision-making considers the varying degrees of CAV interactions and flexibility in adjustment strategies to determine optimization priorities, which reduces the frequency of ineffective optimizations. Experimental evaluations across various urban traffic scenarios with different topological structures demonstrate the effectiveness and efficiency of the proposed method compared with MILP and comparisons of different optimization sequences validate the efficiency of the sequential Gauss-Seidel algorithm for cooperative decision-making.