 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Safe Trajectory Optimization for Mobile Manipulators With Neural Configuration Space Distance Field
Jan 27, 2026Mobile manipulators promise agile, long-horizon behavior by coordinating base and arm motion, yet whole-body trajectory optimization in cluttered, confined spaces remains difficult due to high-dimensional nonconvexity and the need for fast, accurate collision reasoning. Configuration Space Distance Fields (CDF) enable fixed-base manipulators to model collisions directly in configuration space via smooth, implicit distances. This representation holds strong potential to bypass the nonlinear configuration-to-workspace mapping while preserving accurate whole-body geometry and providing optimization-friendly collision costs. Yet, extending this capability to mobile manipulators is hindered by unbounded workspaces and tighter base-arm coupling. We lift this promise to mobile manipulation with Generalized Configuration Space Distance Fields (GCDF), extending CDF to robots with both translational and rotational joints in unbounded workspaces with tighter base-arm coupling. We prove that GCDF preserves Euclidean-like local distance structure and accurately encodes whole-body geometry in configuration space, and develop a data generation and training pipeline that yields continuous neural GCDFs with accurate values and gradients, supporting efficient GPU-batched queries. Building on this representation, we develop a high-performance sequential convex optimization framework centered on GCDF-based collision reasoning. The solver scales to large numbers of implicit constraints through (i) online specification of neural constraints, (ii) sparsity-aware active-set detection with parallel batched evaluation across thousands of constraints, and (iii) incremental constraint management for rapid replanning under scene changes.
FLORES: A Reconfigured Wheel-Legged Robot for Enhanced Steering and Adaptability
Jul 30, 2025Wheel-legged robots integrate the agility of legs for navigating rough terrains while harnessing the efficiency of wheels for smooth surfaces. However, most existing designs do not fully capitalize on the benefits of both legged and wheeled structures, which limits overall system flexibility and efficiency. We present FLORES (reconfigured wheel-legged robot for enhanced steering and adaptability), a novel wheel-legged robot design featuring a distinctive front-leg configuration that sets it beyond standard design approaches. Specifically, FLORES replaces the conventional hip-roll degree of freedom (DoF) of the front leg with hip-yaw DoFs, and this allows for efficient movement on flat surfaces while ensuring adaptability when navigating complex terrains. This innovative design facilitates seamless transitions between different locomotion modes (i.e., legged locomotion and wheeled locomotion) and optimizes the performance across varied environments. To fully exploit FLORES's mechanical capabilities, we develop a tailored reinforcement learning (RL) controller that adapts the Hybrid Internal Model (HIM) with a customized reward structure optimized for our unique mechanical configuration. This framework enables the generation of adaptive, multi-modal locomotion strategies that facilitate smooth transitions between wheeled and legged movements. Furthermore, our distinctive joint design enables the robot to exhibit novel and highly efficient locomotion gaits that capitalize on the synergistic advantages of both locomotion modes. Through comprehensive experiments, we demonstrate FLORES's enhanced steering capabilities, improved navigation efficiency, and versatile locomotion across various terrains. The open-source project can be found at https://github.com/ZhichengSong6/FLORES-A-Reconfigured-Wheel-Legged-Robot-for-Enhanced-Steering-and-Adaptability.git.
FRTree Planner: Robot Navigation in Cluttered and Unknown Environments with Tree of Free Regions
Oct 26, 2024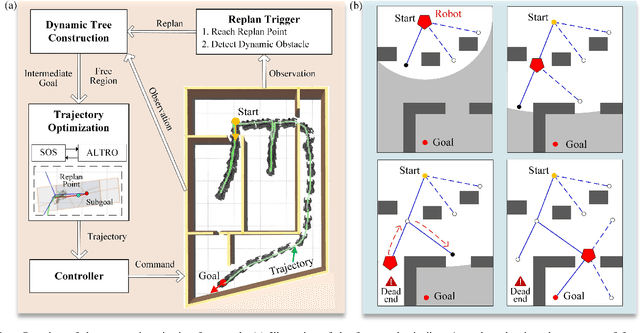

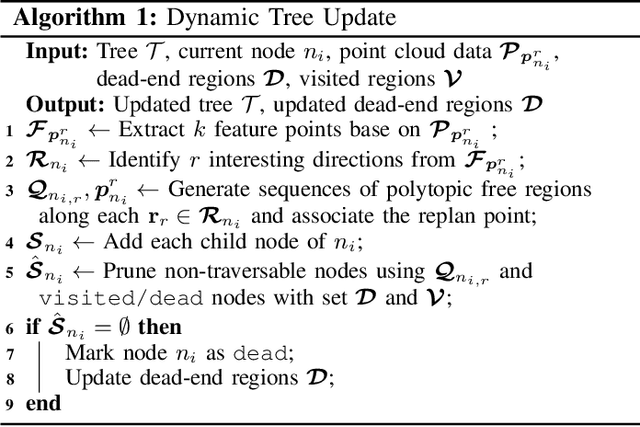
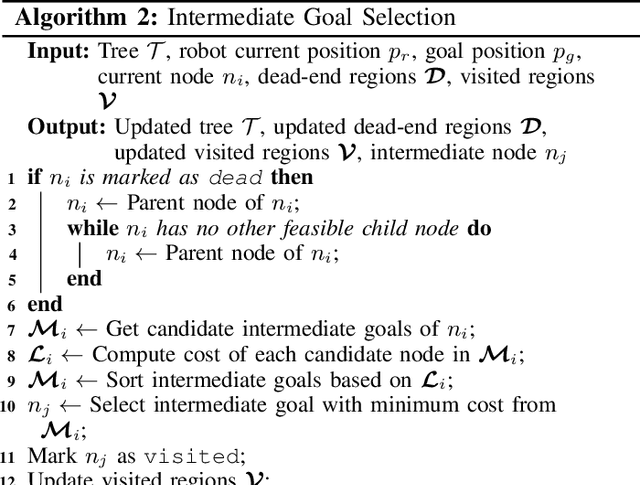
In this work, we present FRTree planner, a novel robot navigation framework that leverages a tree structure of free regions, specifically designed for navigation in cluttered and unknown environments with narrow passages. The framework continuously incorporates real-time perceptive information to identify distinct navigation options and dynamically expands the tree toward explorable and traversable directions. This dynamically constructed tree incrementally encodes the geometric and topological information of the collision-free space, enabling efficient selection of the intermediate goals, navigating around dead-end situations, and avoidance of dynamic obstacles without a prior map. Crucially, our method performs a comprehensive analysis of the geometric relationship between free regions and the robot during online replanning. In particular, the planner assesses the accessibility of candidate passages based on the robot's geometries, facilitating the effective selection of the most viable intermediate goals through accessible narrow passages while minimizing unnecessary detours. By combining the free region information with a bi-level trajectory optimization tailored for robots with specific geometries, our approach generates robust and adaptable obstacle avoidance strategies in confined spaces. Through extensive simulations and real-world experiments, FRTree demonstrates its superiority over benchmark methods in generating safe, efficient motion plans through highly cluttered and unknown terrains with narrow gaps.
Cell Biomechanical Modeling Based on Membrane Theory with Considering Speed Effect of Microinjection
Nov 28, 2022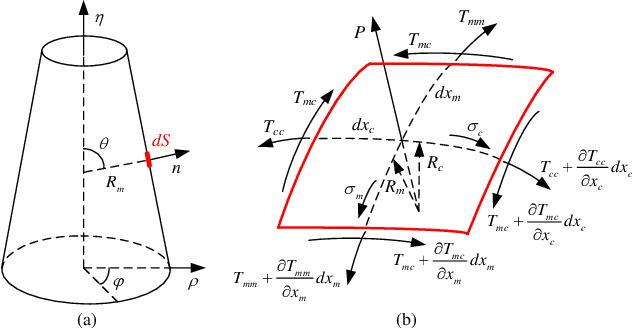
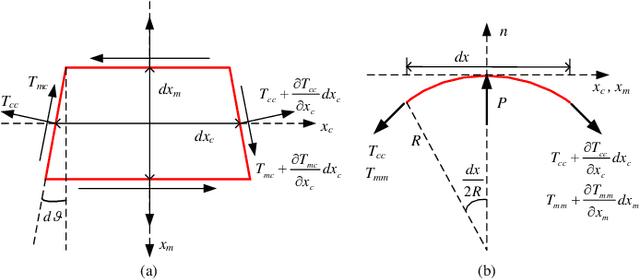
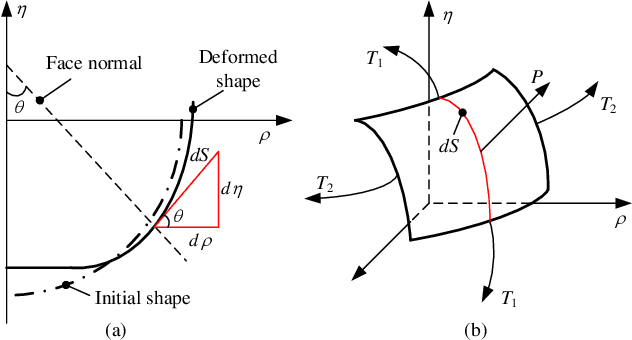
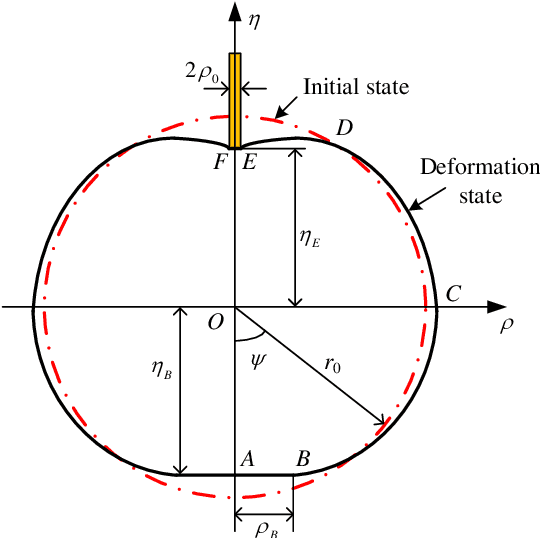
As an effective method to deliver external materials into biological cells, microinjection has been widely applied in the biomedical field. However, the cognition of cell mechanical property is still inadequate, which greatly limits the efficiency and success rate of injection. Thus, a new rate-dependent mechanical model based on membrane theory is proposed for the first time. In this model, an analytical equilibrium equation between the injection force and cell deformation is established by considering the speed effect of microinjection. Different from the traditional membrane-theory-based model, the elastic coefficient of the constitutive material in the proposed model is modified as a function of the injection velocity and acceleration, effectively simulating the influence of speeds on the mechanical responses and providing a more generalized and practical model. Using this model, other mechanical responses at different speeds can be also accurately predicted, including the distribution of membrane tension and stress and the deformed shape. To verify the validity of the model, numerical simulations and experiments are carried out. The results show that the proposed model can match the real mechanical responses well at different injection speeds.
A Legged Soft Robot Platform for Dynamic Locomotion
Nov 13, 2020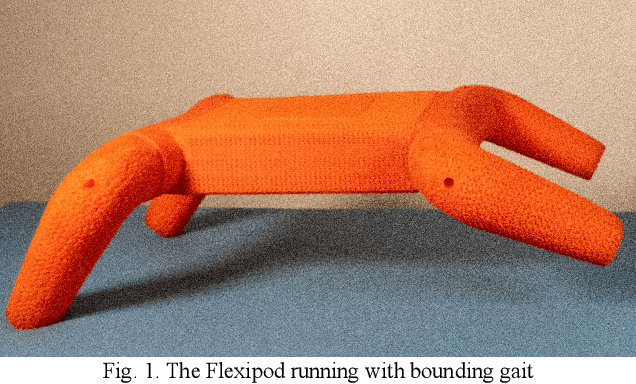
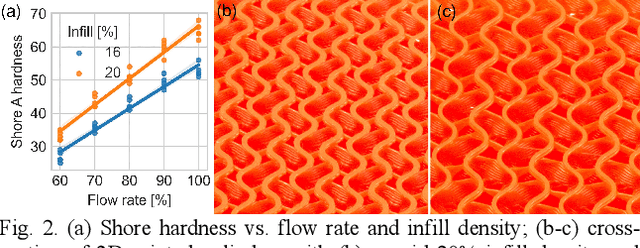
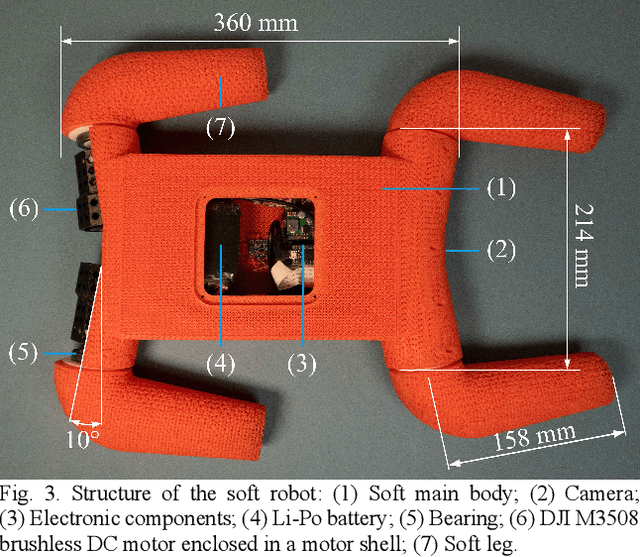
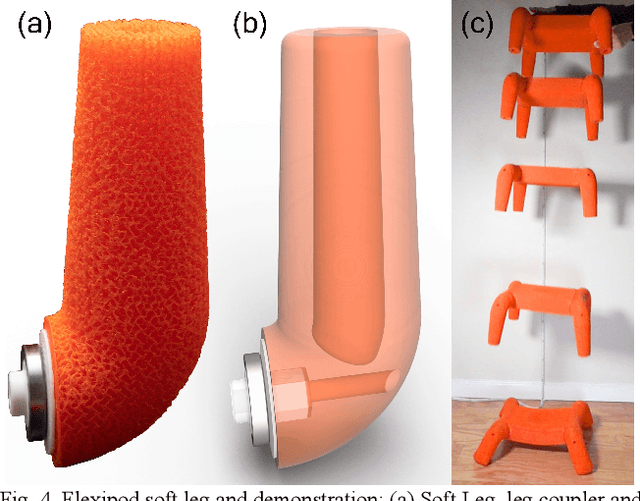
We present an open-source untethered quadrupedal soft robot platform for dynamic locomotion (e.g., high-speed running and backflipping). The robot is mostly soft (80 vol.%) while driven by four geared servo motors. The robot's soft body and soft legs were 3D printed with gyroid infill using a flexible material, enabling it to conform to the environment and passively stabilize during locomotion on multi-terrain environments. In addition, we simulated the robot in a real-time soft body simulation. With tuned gaits in simulation, the real robot can locomote at a speed of 0.9 m/s (2.5 body length/second), substantially faster than most untethered legged soft robots published to date. We hope this platform, along with its verified simulator, can catalyze the development of soft robotics.