 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRePO: Bridging On-Policy Learning and Off-Policy Knowledge through Rephrasing Policy Optimization
Feb 11, 2026Aligning large language models (LLMs) on domain-specific data remains a fundamental challenge. Supervised fine-tuning (SFT) offers a straightforward way to inject domain knowledge but often degrades the model's generality. In contrast, on-policy reinforcement learning (RL) preserves generality but fails to effectively assimilate hard samples that exceed the model's current reasoning level. Recent off-policy RL attempts improve hard sample utilization, yet they suffer from severe training instability due to the forced distribution shift toward off-policy knowledge. To reconcile effective off-policy knowledge absorption with the stability of on-policy RL, we propose Rephrasing Policy Optimization (RePO). In RePO, the policy model is prompted to first comprehend off-policy knowledge and then rephrase it into trajectories that conform to its own stylistic and parametric distribution. RePO dynamically replaces low-reward rollouts with these rephrased, high-quality trajectories. This strategy guides the model toward correct reasoning paths while strictly preserving on-policy training dynamics. Experiments on several benchmarks demonstrate that RePO improves hard-sample utilization and outperforms existing baselines, achieving state-of-the-art performance.
MoBiLE: Efficient Mixture-of-Experts Inference on Consumer GPU with Mixture of Big Little Experts
Oct 14, 2025
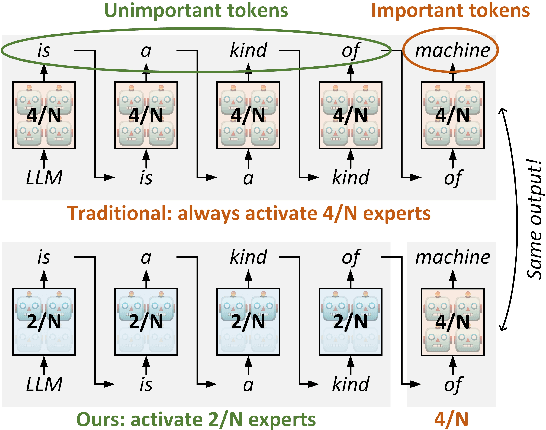


Mixture-of-Experts (MoE) models have recently demonstrated exceptional performance across a diverse range of applications. The principle of sparse activation in MoE models facilitates an offloading strategy, wherein active experts are maintained in GPU HBM, while inactive experts are stored in CPU DRAM. The efficacy of this approach, however, is fundamentally constrained by the limited bandwidth of the CPU-GPU interconnect. To mitigate this bottleneck, existing approaches have employed prefetching to accelerate MoE inference. These methods attempt to predict and prefetch the required experts using specially trained modules. Nevertheless, such techniques are often encumbered by significant training overhead and have shown diminished effectiveness on recent MoE models with fine-grained expert segmentation. In this paper, we propose MoBiLE, a plug-and-play offloading-based MoE inference framework with \textit{mixture of big-little experts}. It reduces the number of experts for unimportant tokens to half for acceleration while maintaining full experts for important tokens to guarantee model quality. Further, a dedicated fallback and prefetching mechanism is designed for switching between little and big experts to improve memory efficiency. We evaluate MoBiLE on four typical modern MoE architectures and challenging generative tasks. Our results show that MoBiLE achieves a speedup of 1.60x to 1.72x compared to the baseline on a consumer GPU system, with negligible degradation in accuracy.
A Multi-Dimensional Constraint Framework for Evaluating and Improving Instruction Following in Large Language Models
May 12, 2025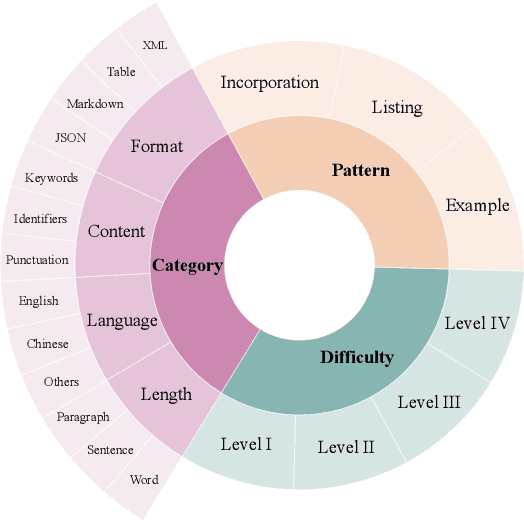

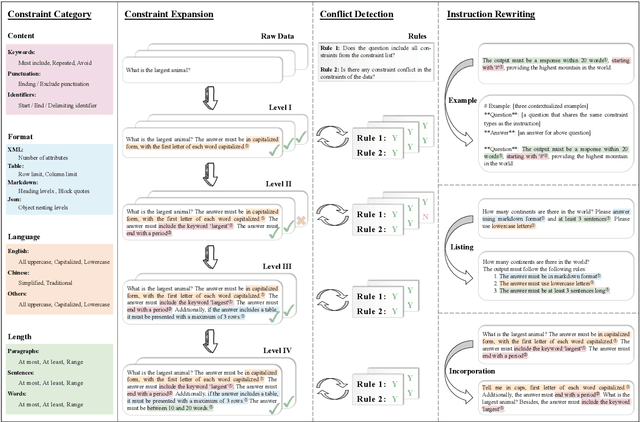
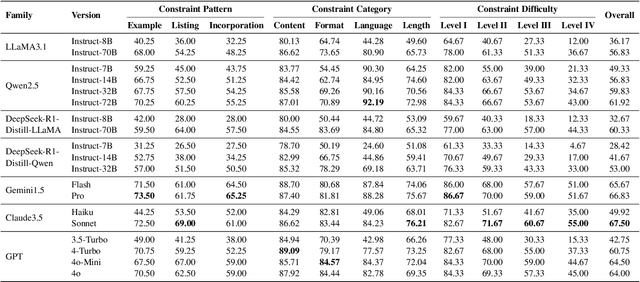
Instruction following evaluates large language models (LLMs) on their ability to generate outputs that adhere to user-defined constraints. However, existing benchmarks often rely on templated constraint prompts, which lack the diversity of real-world usage and limit fine-grained performance assessment. To fill this gap, we propose a multi-dimensional constraint framework encompassing three constraint patterns, four constraint categories, and four difficulty levels. Building on this framework, we develop an automated instruction generation pipeline that performs constraint expansion, conflict detection, and instruction rewriting, yielding 1,200 code-verifiable instruction-following test samples. We evaluate 19 LLMs across seven model families and uncover substantial variation in performance across constraint forms. For instance, average performance drops from 77.67% at Level I to 32.96% at Level IV. Furthermore, we demonstrate the utility of our approach by using it to generate data for reinforcement learning, achieving substantial gains in instruction following without degrading general performance. In-depth analysis indicates that these gains stem primarily from modifications in the model's attention modules parameters, which enhance constraint recognition and adherence. Code and data are available in https://github.com/Junjie-Ye/MulDimIF.
LoRA-Composer: Leveraging Low-Rank Adaptation for Multi-Concept Customization in Training-Free Diffusion Models
Mar 18, 2024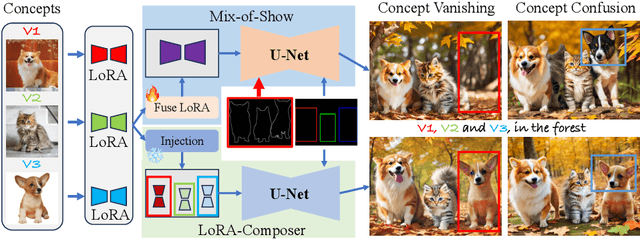
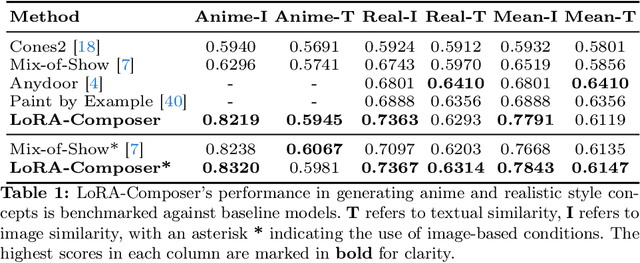
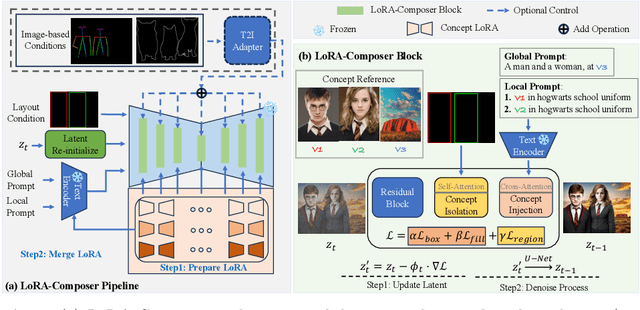
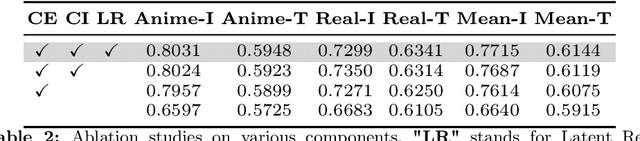
Customization generation techniques have significantly advanced the synthesis of specific concepts across varied contexts. Multi-concept customization emerges as the challenging task within this domain. Existing approaches often rely on training a Low-Rank Adaptations (LoRA) fusion matrix of multiple LoRA to merge various concepts into a single image. However, we identify this straightforward method faces two major challenges: 1) concept confusion, which occurs when the model cannot preserve distinct individual characteristics, and 2) concept vanishing, where the model fails to generate the intended subjects. To address these issues, we introduce LoRA-Composer, a training-free framework designed for seamlessly integrating multiple LoRAs, thereby enhancing the harmony among different concepts within generated images. LoRA-Composer addresses concept vanishing through Concept Injection Constraints, enhancing concept visibility via an expanded cross-attention mechanism. To combat concept confusion, Concept Isolation Constraints are introduced, refining the self-attention computation. Furthermore, Latent Re-initialization is proposed to effectively stimulate concept-specific latent within designated regions. Our extensive testing showcases a notable enhancement in LoRA-Composer's performance compared to standard baselines, especially when eliminating the image-based conditions like canny edge or pose estimations. Code is released at https://github.com/Young98CN/LoRA\_Composer.
Cell Biomechanical Modeling Based on Membrane Theory with Considering Speed Effect of Microinjection
Nov 28, 2022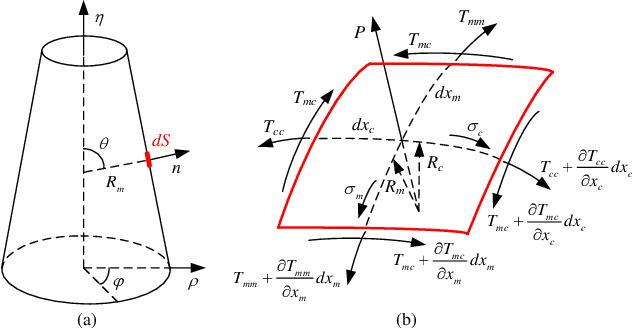
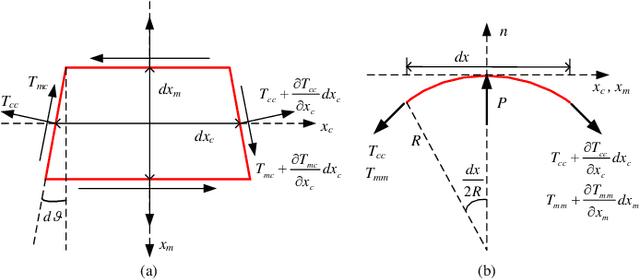
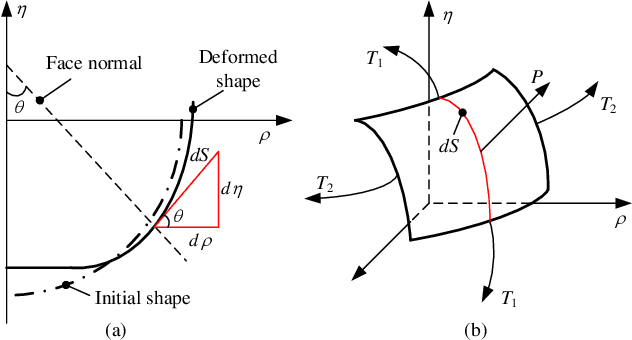
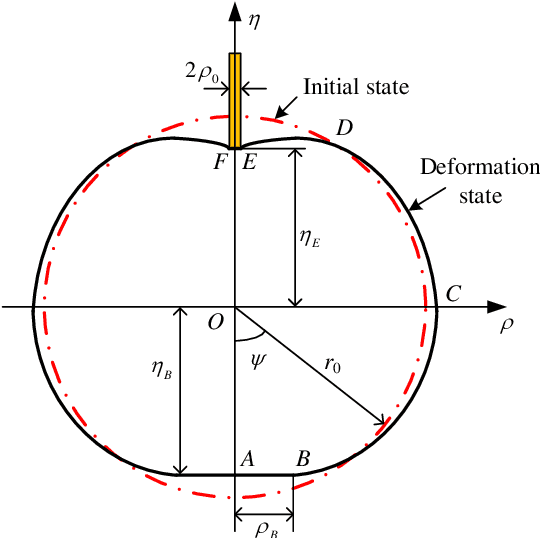
As an effective method to deliver external materials into biological cells, microinjection has been widely applied in the biomedical field. However, the cognition of cell mechanical property is still inadequate, which greatly limits the efficiency and success rate of injection. Thus, a new rate-dependent mechanical model based on membrane theory is proposed for the first time. In this model, an analytical equilibrium equation between the injection force and cell deformation is established by considering the speed effect of microinjection. Different from the traditional membrane-theory-based model, the elastic coefficient of the constitutive material in the proposed model is modified as a function of the injection velocity and acceleration, effectively simulating the influence of speeds on the mechanical responses and providing a more generalized and practical model. Using this model, other mechanical responses at different speeds can be also accurately predicted, including the distribution of membrane tension and stress and the deformed shape. To verify the validity of the model, numerical simulations and experiments are carried out. The results show that the proposed model can match the real mechanical responses well at different injection speeds.
Wireless Sensing Data Collection and Processing for Metaverse Avatar Construction
Nov 23, 2022Recent advances in emerging technologies such as artificial intelligence and extended reality have pushed the Metaverse, a virtual, shared space, into reality. In Metaverse, users can customize virtual avatars to experience a different life. While impressive, avatar construction requires a lot of data that manifest users in the physical world from various perspectives, and wireless sensing data is one of them. For example, machine learning (ML) and signal processing can help extract information about user behavior from sensing data, thereby facilitating avatar behavior construction in the Metaverse. This article presents a wireless sensing dataset to support the emerging research on Metaverse avatar construction. Rigorously, the existing data collection platforms and datasets are analyzed first. On this basis, we introduce the platform used in this paper, as well as the data collection method and scenario. We observe that the collected sensing data, i.e., channel state information (CSI), suffers from a phase shift problem, which negatively affects the extraction of user information such as behavior and heartbeat and further deteriorates the avatar construction. Therefore, we propose to detect and correct this phase shift by a sliding window and phase compensation, respectively, and then validate the proposed scheme with the collected data. Finally, several research directions related to the avatar construction are given from the perspective of datasets.
Optimal Probing with Statistical Guarantees for Network Monitoring at Scale
Sep 16, 2021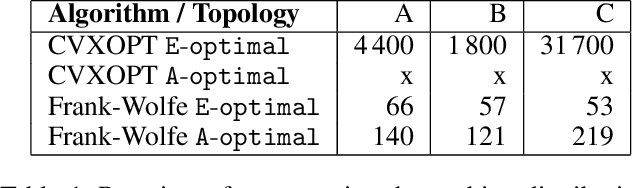
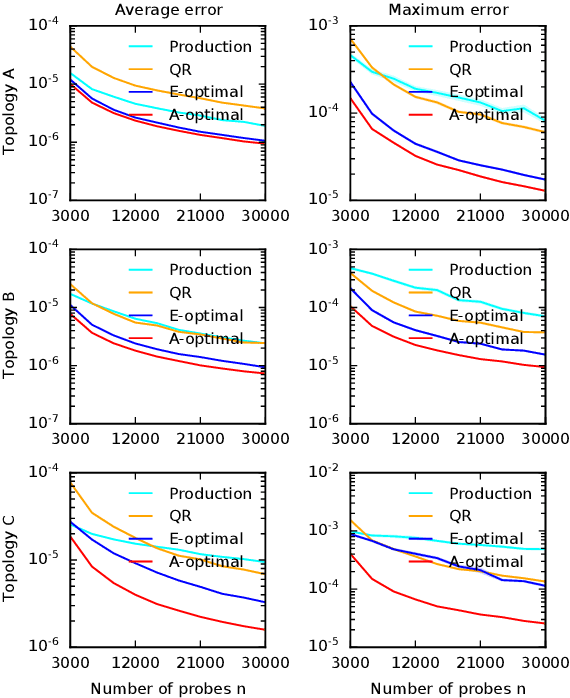
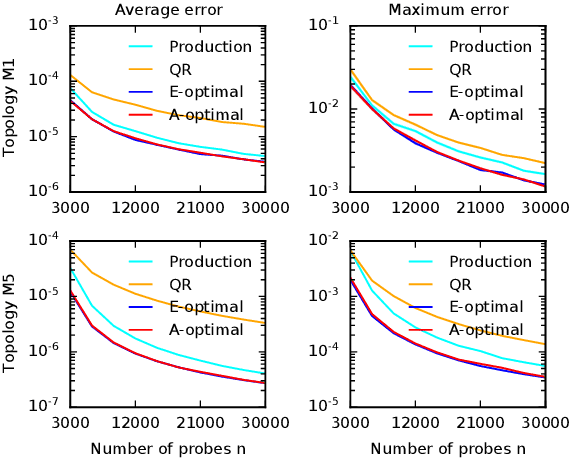
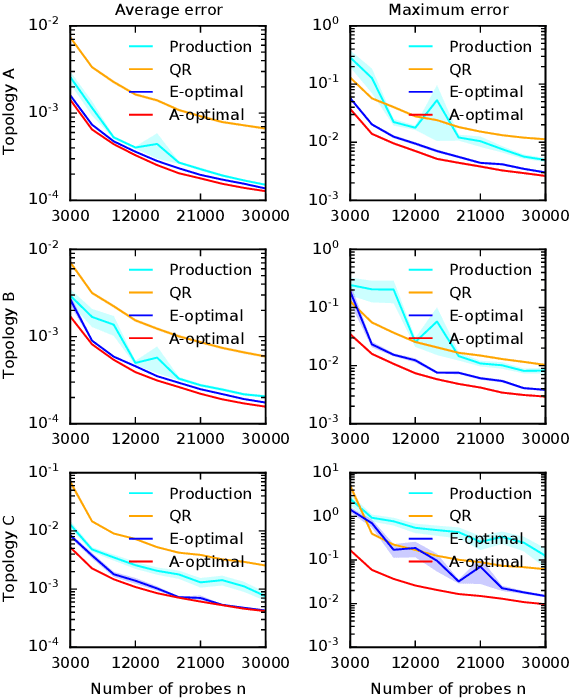
Cloud networks are difficult to monitor because they grow rapidly and the budgets for monitoring them are limited. We propose a framework for estimating network metrics, such as latency and packet loss, with guarantees on estimation errors for a fixed monitoring budget. Our proposed algorithms produce a distribution of probes across network paths, which we then monitor; and are based on A- and E-optimal experimental designs in statistics. Unfortunately, these designs are too computationally costly to use at production scale. We propose their scalable and near-optimal approximations based on the Frank-Wolfe algorithm. We validate our approaches in simulation on real network topologies, and also using a production probing system in a real cloud network. We show major gains in reducing the probing budget compared to both production and academic baselines, while maintaining low estimation errors, even with very low probing budgets.
LARNet: Lie Algebra Residual Network for Profile Face Recognition
Mar 15, 2021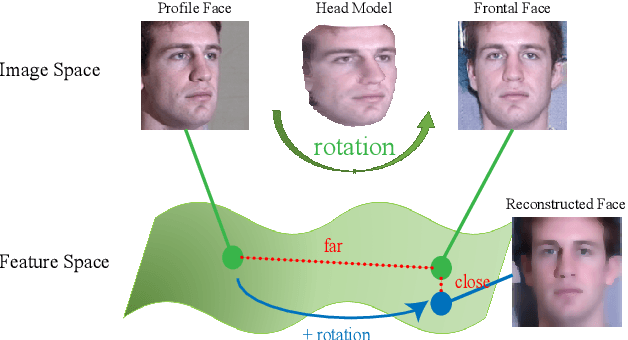
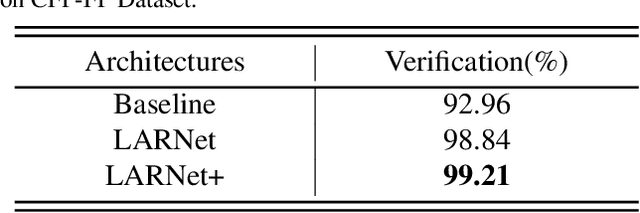
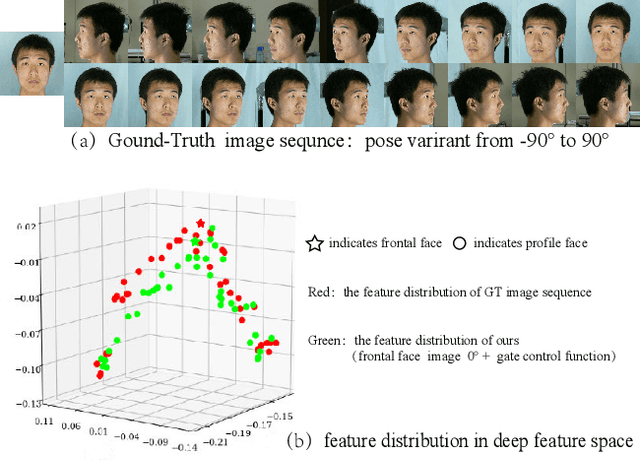
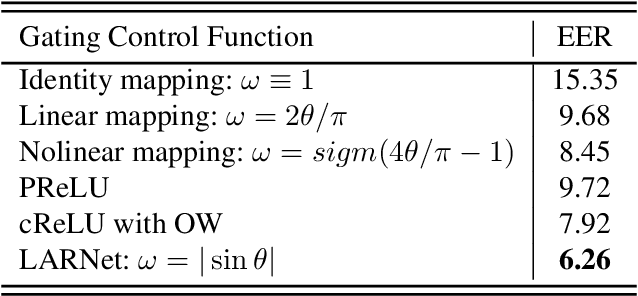
Due to large variations between profile and frontal faces, profile-based face recognition remains as a tremendous challenge in many practical vision scenarios. Traditional techniques address this challenge either by synthesizing frontal faces or by pose-invariants learning. In this paper, we propose a novel method with Lie algebra theory to explore how face rotation in the 3D space affects the deep feature generation process of convolutional neural networks (CNNs). We prove that face rotation in the image space is equivalent to an additive residual component in the feature space of CNNs, which is determined solely by the rotation. Based on this theoretical finding, we further design a Lie algebraic residual network (LARNet) for tackling profile-based face recognition. Our LARNet consists of a residual subnet for decoding rotation information from input face images, and a gating subnet to learn rotation magnitude for controlling the number of residual components contributing to the feature learning process. Comprehensive experimental evaluations on frontal-profile face datasets and general face recognition datasets demonstrate that our method consistently outperforms the state-of-the-arts.
Quasi-Direct Drive Actuation for a Lightweight Hip Exoskeleton with High Backdrivability and High Bandwidth
Apr 01, 2020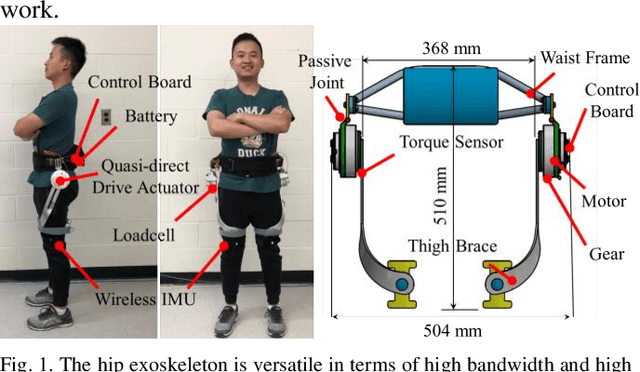
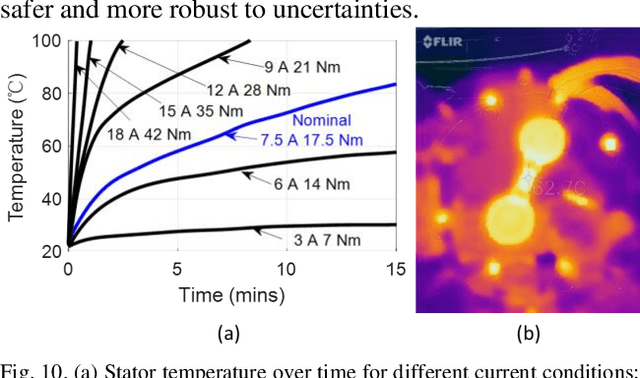
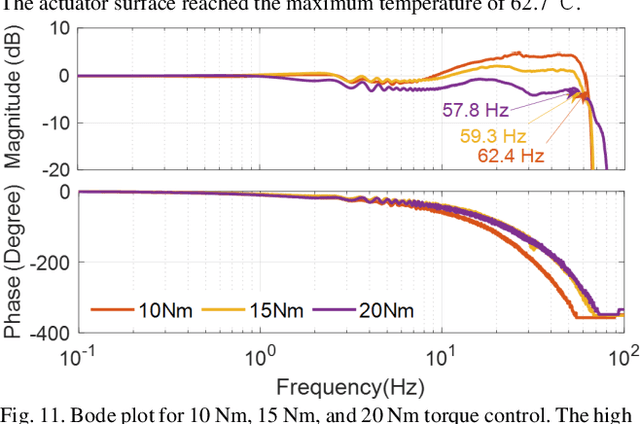
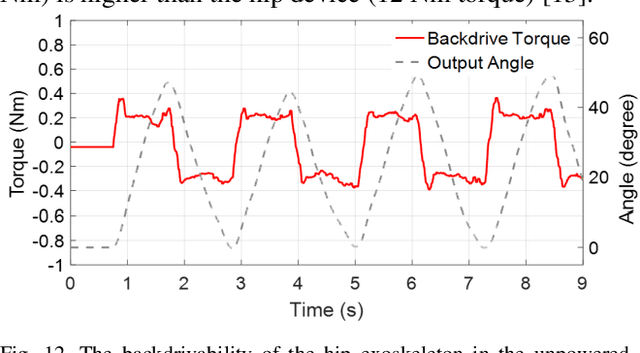
High-performance actuators are crucial to enable mechanical versatility of lower-limb wearable robots, which are required to be lightweight, highly backdrivable, and with high bandwidth. State-of-the-art actuators, e.g., series elastic actuators (SEAs), have to compromise bandwidth to improve compliance (i.e., backdrivability). In this paper, we describe the design and human-robot interaction modeling of a portable hip exoskeleton based on our custom quasi-direct drive (QDD) actuation (i.e., a high torque density motor with low ratio gear). We also present a model-based performance benchmark comparison of representative actuators in terms of torque capability, control bandwidth, backdrivability, and force tracking accuracy. This paper aims to corroborate the underlying philosophy of "design for control", namely meticulous robot design can simplify control algorithms while ensuring high performance. Following this idea, we create a lightweight bilateral hip exoskeleton (overall mass is 3.4 kg) to reduce joint loadings during normal activities, including walking and squatting. Experimental results indicate that the exoskeleton is able to produce high nominal torque (17.5 Nm), high backdrivability (0.4 Nm backdrive torque), high bandwidth (62.4 Hz), and high control accuracy (1.09 Nm root mean square tracking error, i.e., 5.4% of the desired peak torque). Its controller is versatile to assist walking at different speeds (0.8-1.4 m/s) and squatting at 2 s cadence. This work demonstrates significant improvement in backdrivability and control bandwidth compared with state-of-the-art exoskeletons powered by the conventional actuation or SEA.
A Fractional-Order Normalized Bouc-Wen Model for Piezoelectric Hysteresis Nonlinearity
Mar 10, 2020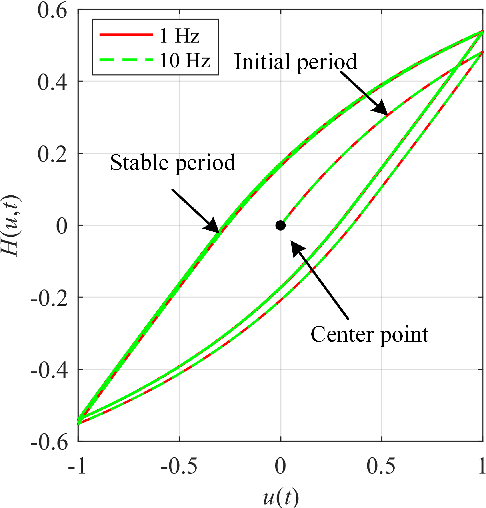
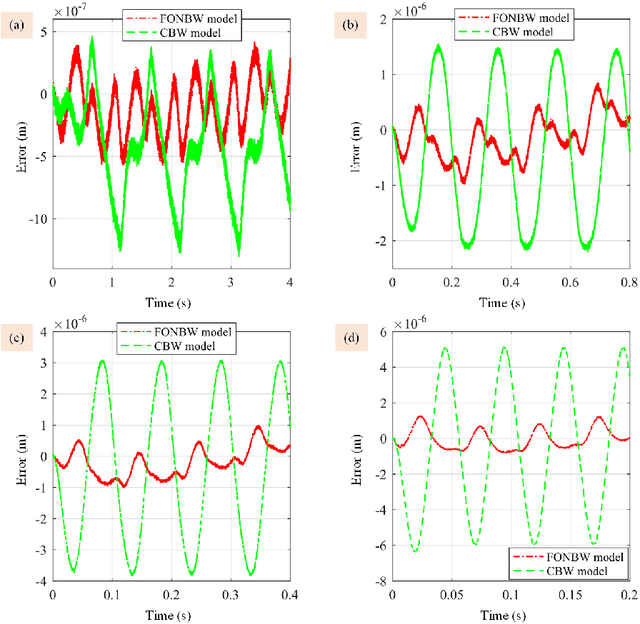
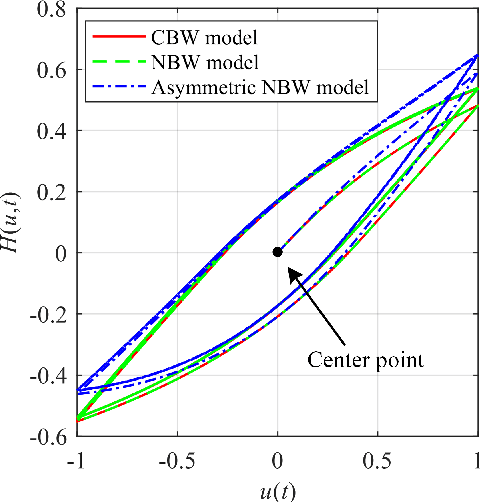
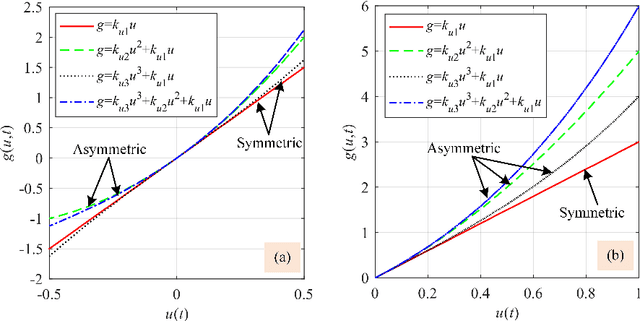
This paper presents a new fractional-order normalized Bouc-Wen (BW) (FONBW) model to describe the asymmetric and rate-dependent hysteresis nonlinearity of piezoelectric actuators (PEAs). In view of the fact that the classical BW (CBW) model is only efficient for the symmetric and rate-independent hysteresis description, the FONBW model is devoted to characterizing the asymmetric and rate-dependent behaviors of the hysteresis in PEAs by adopting a generalized input function and two fractional operators, respectively. Different from the traditional modified BW models, the proposed FONBW model also eliminates the redundancy of parameters in the CBW model via the normalization processing. By this way, the developed FONBW model has a relative simple mathematic expression with fewer parameters to simultaneously characterize the asymmetric and rate-dependent hysteresis behaviors of PEAs. Model parameters are identified by the self-adaptive differential evolution algorithm. To validate the effectiveness of the proposed model, a series of experimental studies are carried out on a PEA system. Results show that the proposed model is superior to the CBW model in accuracy.