 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpine-Inspired Continuum Soft Exoskeleton for Stoop Lifting Assistance
Jul 04, 2019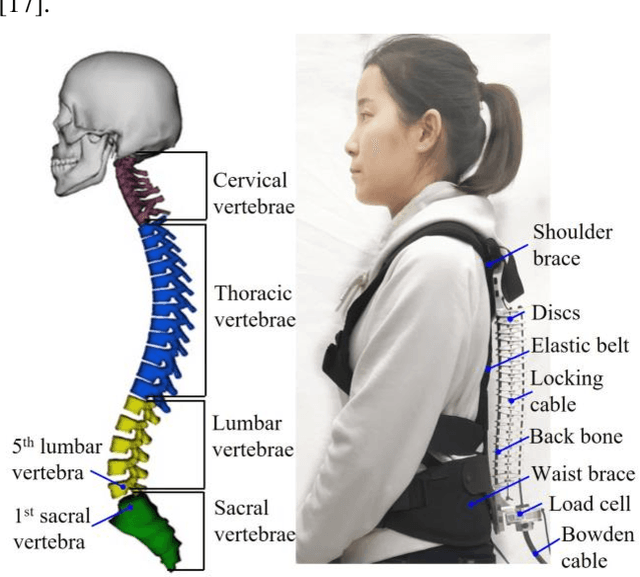
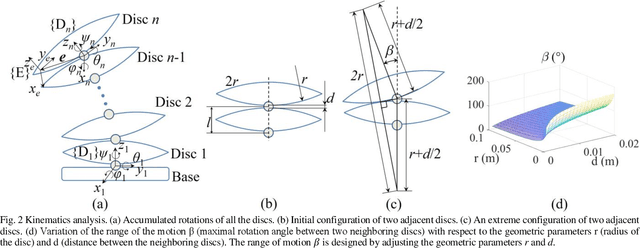
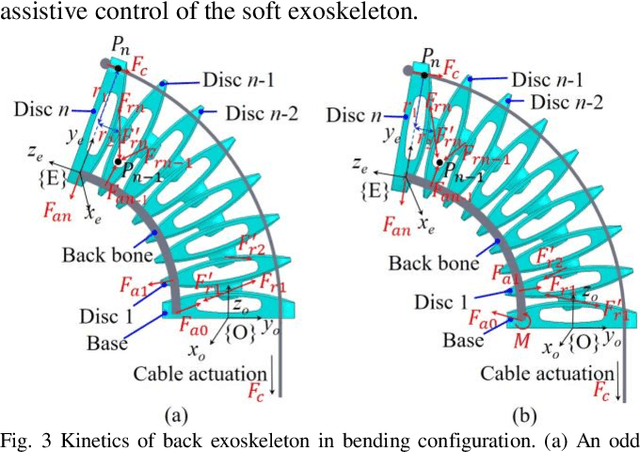
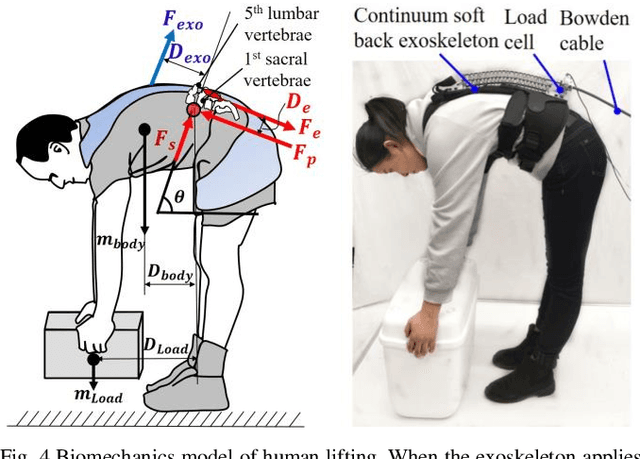
Back injuries are the most prevalent work-related musculoskeletal disorders and represent a major cause of disability. Although innovations in wearable robots aim to alleviate this hazard, the majority of existing exoskeletons are obtrusive because the rigid linkage design limits natural movement, thus causing ergonomic risk. Moreover, these existing systems are typically only suitable for one type of movement assistance, not ubiquitous for a wide variety of activities. To fill in this gap, this paper presents a new wearable robot design approach continuum soft exoskeleton. This spine-inspired wearable robot is unobtrusive and assists both squat and stoops while not impeding walking motion. To tackle the challenge of the unique anatomy of spine that is inappropriate to be simplified as a single degree of freedom joint, our robot is conformal to human anatomy and it can reduce multiple types of forces along the human spine such as the spinae muscle force, shear, and compression force of the lumbar vertebrae. We derived kinematics and kinetics models of this mechanism and established an analytical biomechanics model of human-robot interaction. Quantitative analysis of disc compression force, disc shear force and muscle force was performed in simulation. We further developed a virtual impedance control strategy to deliver force control and compensate hysteresis of Bowden cable transmission. The feasibility of the prototype was experimentally tested on three healthy subjects. The root mean square error of force tracking is 6.63 N (3.3 % of the 200N peak force) and it demonstrated that it can actively control the stiffness to the desired value. This continuum soft exoskeleton represents a feasible solution with the potential to reduce back pain for multiple activities and multiple forces along the human spine.
* 8 pages, 13 figures
Comfort-Centered Design of a Lightweight and Backdrivable Knee Exoskeleton
Feb 11, 2019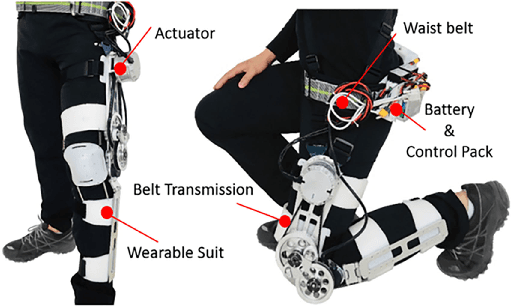
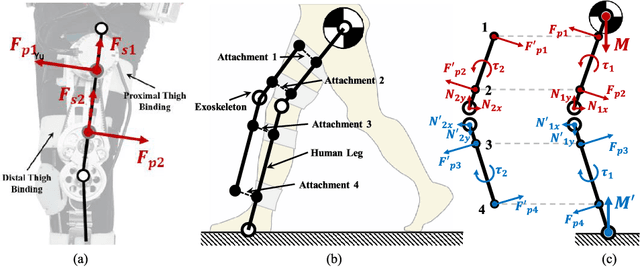
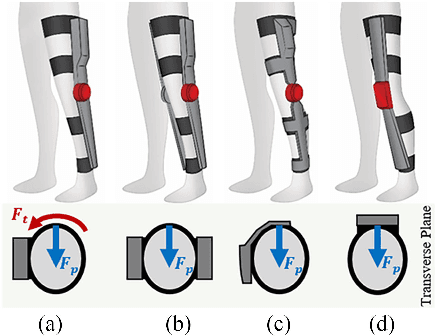
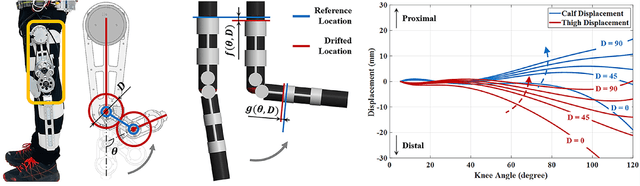
This paper presents design principles for comfort-centered wearable robots and their application in a lightweight and backdrivable knee exoskeleton. The mitigation of discomfort is treated as mechanical design and control issues and three solutions are proposed in this paper: 1) a new wearable structure optimizes the strap attachment configuration and suit layout to ameliorate excessive shear forces of conventional wearable structure design; 2) rolling knee joint and double-hinge mechanisms reduce the misalignment in the sagittal and frontal plane, without increasing the mechanical complexity and inertia, respectively; 3) a low impedance mechanical transmission reduces the reflected inertia and damping of the actuator to human, thus the exoskeleton is highly-backdrivable. Kinematic simulations demonstrate that misalignment between the robot joint and knee joint can be reduced by 74% at maximum knee flexion. In experiments, the exoskeleton in the unpowered mode exhibits 1.03 Nm root mean square (RMS) low resistive torque. The torque control experiments demonstrate 0.31 Nm RMS torque tracking error in three human subjects.