 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Music Analogy Via Latent Representation Disentanglement
Jul 08, 2019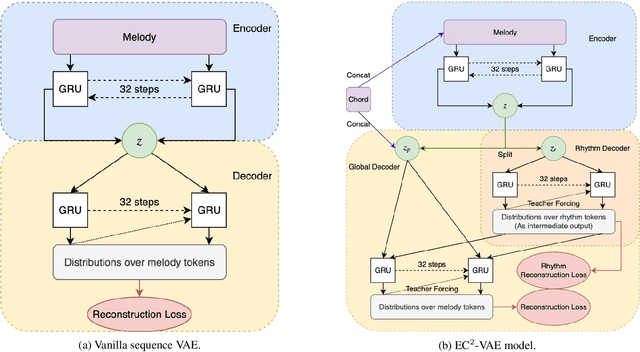
Analogy-making is a key method for computer algorithms to generate both natural and creative music pieces. In general, an analogy is made by partially transferring the music abstractions, i.e., high-level representations and their relationships, from one piece to another; however, this procedure requires disentangling music representations, which usually takes little effort for musicians but is non-trivial for computers. Three sub-problems arise: extracting latent representations from the observation, disentangling the representations so that each part has a unique semantic interpretation, and mapping the latent representations back to actual music. In this paper, we contribute an explicitly-constrained variational autoencoder (EC$^2$-VAE) as a unified solution to all three sub-problems. We focus on disentangling the pitch and rhythm representations of 8-beat music clips conditioned on chords. In producing music analogies, this model helps us to realize the imaginary situation of "what if" a piece is composed using a different pitch contour, rhythm pattern, or chord progression by borrowing the representations from other pieces. Finally, we validate the proposed disentanglement method using objective measurements and evaluate the analogy examples by a subjective study.
Inspecting and Interacting with Meaningful Music Representations using VAE
Apr 18, 2019



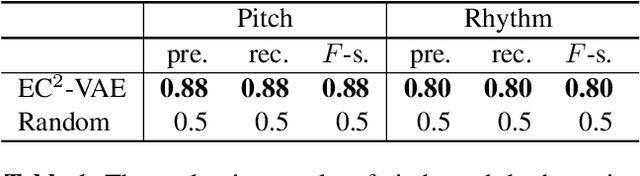
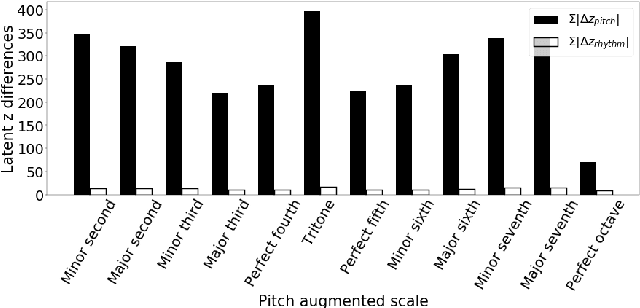
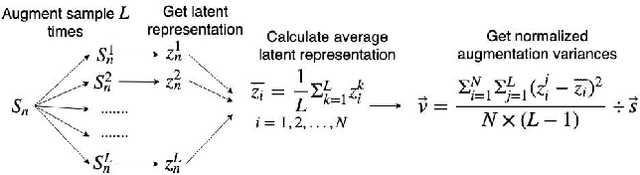
Variational Autoencoders(VAEs) have already achieved great results on image generation and recently made promising progress on music generation. However, the generation process is still quite difficult to control in the sense that the learned latent representations lack meaningful music semantics. It would be much more useful if people can modify certain music features, such as rhythm and pitch contour, via latent representations to test different composition ideas. In this paper, we propose a new method to inspect the pitch and rhythm interpretations of the latent representations and we name it disentanglement by augmentation. Based on the interpretable representations, an intuitive graphical user interface is designed for users to better direct the music creation process by manipulating the pitch contours and rhythmic complexity.
Comfort-Centered Design of a Lightweight and Backdrivable Knee Exoskeleton
Feb 11, 2019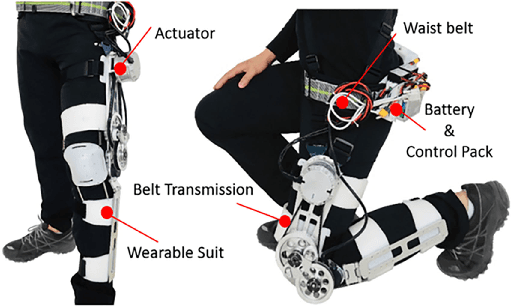
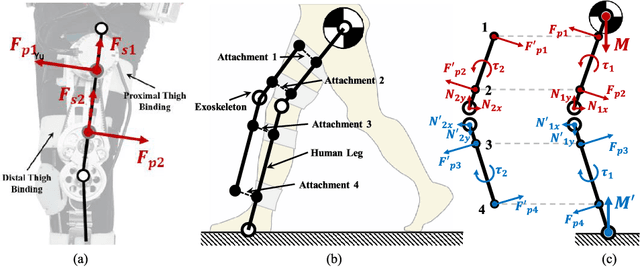
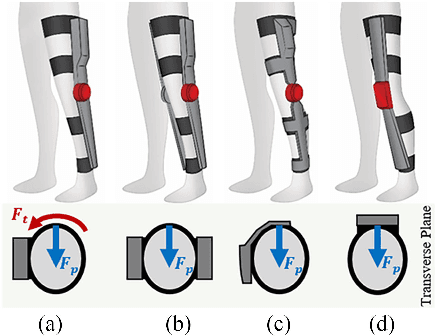
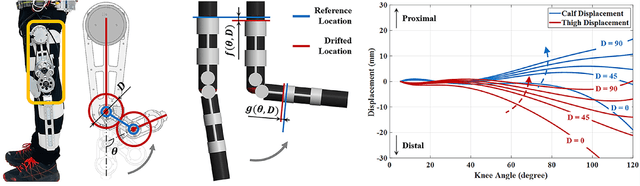
This paper presents design principles for comfort-centered wearable robots and their application in a lightweight and backdrivable knee exoskeleton. The mitigation of discomfort is treated as mechanical design and control issues and three solutions are proposed in this paper: 1) a new wearable structure optimizes the strap attachment configuration and suit layout to ameliorate excessive shear forces of conventional wearable structure design; 2) rolling knee joint and double-hinge mechanisms reduce the misalignment in the sagittal and frontal plane, without increasing the mechanical complexity and inertia, respectively; 3) a low impedance mechanical transmission reduces the reflected inertia and damping of the actuator to human, thus the exoskeleton is highly-backdrivable. Kinematic simulations demonstrate that misalignment between the robot joint and knee joint can be reduced by 74% at maximum knee flexion. In experiments, the exoskeleton in the unpowered mode exhibits 1.03 Nm root mean square (RMS) low resistive torque. The torque control experiments demonstrate 0.31 Nm RMS torque tracking error in three human subjects.
Efficient Architecture Search by Network Transformation
Nov 21, 2017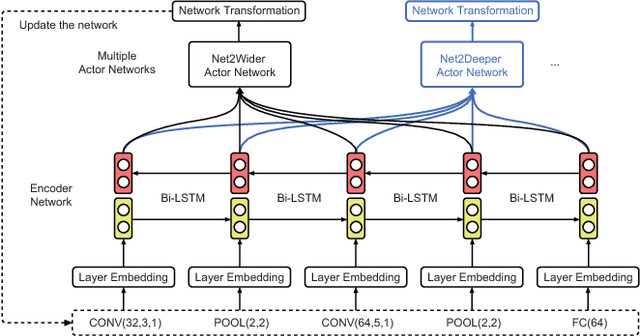

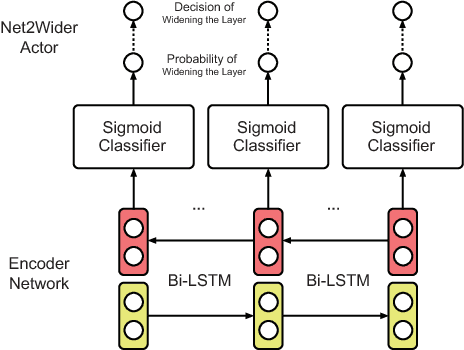

Techniques for automatically designing deep neural network architectures such as reinforcement learning based approaches have recently shown promising results. However, their success is based on vast computational resources (e.g. hundreds of GPUs), making them difficult to be widely used. A noticeable limitation is that they still design and train each network from scratch during the exploration of the architecture space, which is highly inefficient. In this paper, we propose a new framework toward efficient architecture search by exploring the architecture space based on the current network and reusing its weights. We employ a reinforcement learning agent as the meta-controller, whose action is to grow the network depth or layer width with function-preserving transformations. As such, the previously validated networks can be reused for further exploration, thus saves a large amount of computational cost. We apply our method to explore the architecture space of the plain convolutional neural networks (no skip-connections, branching etc.) on image benchmark datasets (CIFAR-10, SVHN) with restricted computational resources (5 GPUs). Our method can design highly competitive networks that outperform existing networks using the same design scheme. On CIFAR-10, our model without skip-connections achieves 4.23\% test error rate, exceeding a vast majority of modern architectures and approaching DenseNet. Furthermore, by applying our method to explore the DenseNet architecture space, we are able to achieve more accurate networks with fewer parameters.