 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSMAT: Staged Multi-Agent Training for Co-Adaptive Exoskeleton Control
Mar 08, 2026Effective exoskeleton assistance requires co-adaptation: as the device alters joint dynamics, the user reorganizes neuromuscular coordination, creating a non-stationary learning problem. Most learning-based approaches do not explicitly account for the sequential nature of human motor adaptation, leading to training instability and poorly timed assistance. We propose Staged Multi-Agent Training (SMAT), a four-stage curriculum designed to mirror how users naturally acclimate to a wearable device. In SMAT, a musculoskeletal human actor and a bilateral hip exoskeleton actor are trained progressively: the human first learns unassisted gait, then adapts to the added device mass; the exoskeleton subsequently learns a positive assistance pattern against a stabilized human policy, and finally both agents co-adapt with full torque capacity and bidirectional feedback. We implement SMAT in the MyoAssist simulation environment using a 26-muscle lower-limb model and an attached hip exoskeleton. Our musculoskeletal simulations demonstrate that the learned exoskeleton control policy produces an average 10.1% reduction in hip muscle activation relative to the no-assist condition. We validated the learned controller in an offline setting using open-source gait data, then deployed it to a physical hip exoskeleton for treadmill experiments with five subjects. The resulting policy delivers consistent assistance and predominantly positive mechanical power without the need for any explicitly imposed timing shift (mean positive power: 13.6 W at 6 Nm RMS torque to 23.8 W at 9.3 Nm RMS torque, with minimal negative power) consistently across all subjects without subject-specific retraining.
Exoskeleton Control through Learning to Reduce Biological Joint Moments in Simulations
Mar 08, 2026Data-driven joint-moment predictors offer a scalable alternative to laboratory-based inverse-dynamics pipelines for biomechanics estimation and exoskeleton control. Meanwhile, physics-based reinforcement learning (RL) enables simulation-trained controllers to learn dynamics-aware assistance strategies without extensive human experimentation. However, quantitative verification of simulation-trained exoskeleton torque predictors, and their impact on human joint power injection, remains limited. This paper presents (1) an RL framework to learn exoskeleton assistance policies that reduce biological joint moments, and (2) a validation pipeline that verifies the trained control networks using an open-source gait dataset through inference and comparison with biological joint moments. Simulation-trained multilayer perceptron (MLP) controllers are developed for level-ground and ramp walking, mapping short-horizon histories of bilateral hip and knee kinematics to normalized assistance torques. Results show that predicted assistance preserves task-intensity trends across speeds and inclines. Agreement is particularly strong at the hip, with cross-correlation coefficients reaching 0.94 at 1.8 m/s and 0.98 during 5° decline walking, demonstrating near-matched temporal structure. Discrepancies increase at higher speeds and steeper inclines, especially at the knee, and are more pronounced in joint power comparisons. Delay tuning biases assistance toward greater positive power injection; modest timing shifts increase positive power and improve agreement in specific gait intervals. Together, these results establish a quantitative validation framework for simulation-trained exoskeleton controllers, demonstrate strong sim-to-data consistency at the torque level, and highlight both the promise and the remaining challenges for sim-to-real transfer.
Characterization of Human Balance through a Reinforcement Learning-based Muscle Controller
Aug 08, 2023



Balance assessment during physical rehabilitation often relies on rubric-oriented battery tests to score a patient's physical capabilities, leading to subjectivity. While some objective balance assessments exist, they are often limited to tracking the center of pressure (COP), which does not fully capture the whole-body postural stability. This study explores the use of the center of mass (COM) state space and presents a promising avenue for monitoring the balance capabilities in humans. We employ a musculoskeletal model integrated with a balance controller, trained through reinforcement learning (RL), to investigate balancing capabilities. The RL framework consists of two interconnected neural networks governing balance recovery and muscle coordination respectively, trained using Proximal Policy Optimization (PPO) with reference state initialization, early termination, and multiple training strategies. By exploring recovery from random initial COM states (position and velocity) space for a trained controller, we obtain the final BR enclosing successful balance recovery trajectories. Comparing the BRs with analytical postural stability limits from a linear inverted pendulum model, we observe a similar trend in successful COM states but more limited ranges in the recoverable areas. We further investigate the effect of muscle weakness and neural excitation delay on the BRs, revealing reduced balancing capability in different regions. Overall, our approach of learning muscular balance controllers presents a promising new method for establishing balance recovery limits and objectively assessing balance capability in bipedal systems, particularly in humans.
Spine-Inspired Continuum Soft Exoskeleton for Stoop Lifting Assistance
Jul 04, 2019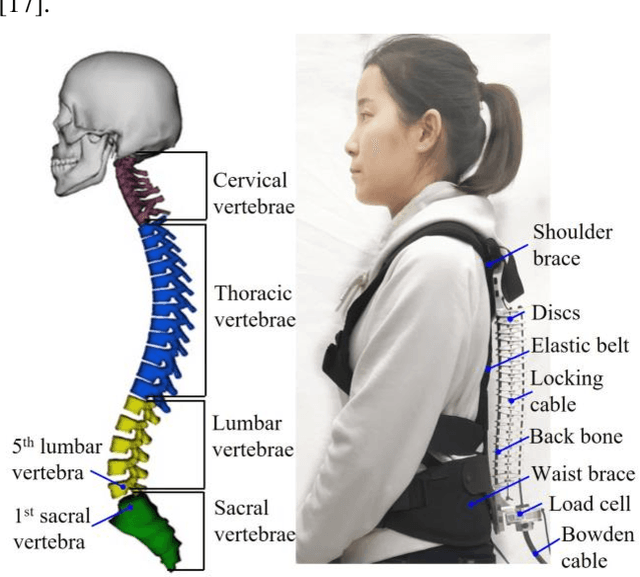
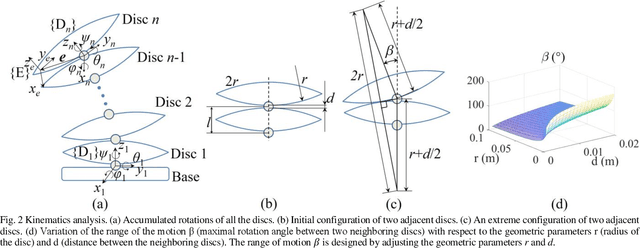
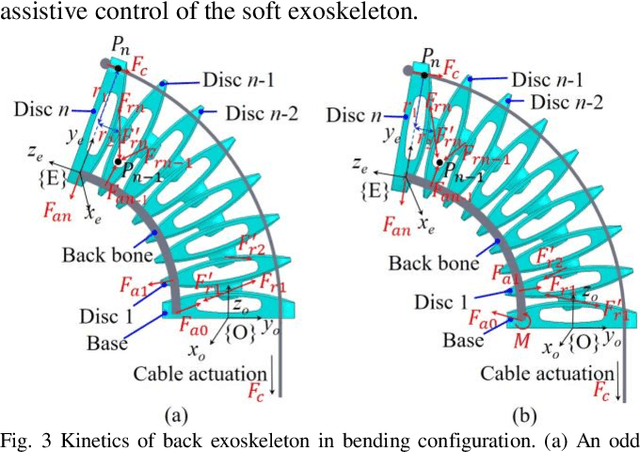
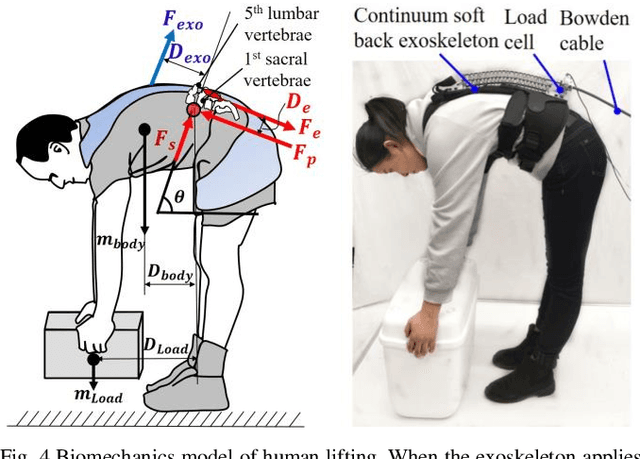
Back injuries are the most prevalent work-related musculoskeletal disorders and represent a major cause of disability. Although innovations in wearable robots aim to alleviate this hazard, the majority of existing exoskeletons are obtrusive because the rigid linkage design limits natural movement, thus causing ergonomic risk. Moreover, these existing systems are typically only suitable for one type of movement assistance, not ubiquitous for a wide variety of activities. To fill in this gap, this paper presents a new wearable robot design approach continuum soft exoskeleton. This spine-inspired wearable robot is unobtrusive and assists both squat and stoops while not impeding walking motion. To tackle the challenge of the unique anatomy of spine that is inappropriate to be simplified as a single degree of freedom joint, our robot is conformal to human anatomy and it can reduce multiple types of forces along the human spine such as the spinae muscle force, shear, and compression force of the lumbar vertebrae. We derived kinematics and kinetics models of this mechanism and established an analytical biomechanics model of human-robot interaction. Quantitative analysis of disc compression force, disc shear force and muscle force was performed in simulation. We further developed a virtual impedance control strategy to deliver force control and compensate hysteresis of Bowden cable transmission. The feasibility of the prototype was experimentally tested on three healthy subjects. The root mean square error of force tracking is 6.63 N (3.3 % of the 200N peak force) and it demonstrated that it can actively control the stiffness to the desired value. This continuum soft exoskeleton represents a feasible solution with the potential to reduce back pain for multiple activities and multiple forces along the human spine.
* 8 pages, 13 figures
Design and Evaluation of Torque Compensation Controllers for a Lower Extremity Exoskeleton
Jul 04, 2019



In this paper, we present an integrated human-in-the-loop simulation paradigm for design and evaluation of a lower extremity exoskeleton that is elastically strapped onto human lower limbs. The exoskeleton has 3 rotational DOF on each side and weights 23kg. Two torque compensation controllers of the exoskeleton are introduced, aiming to reduce interference and provide assistance to human motions, respectively. Their effects on the wearer's biomechanical loadings are studied with a running motion and ground reaction forces are predicted. By examining the interaction forces between the exoskeleton and the wearer, the wearer's joint torques, reaction forces, and muscle activations and then by comparing them with those of the passive exoskeleton, we show sound evidence of the efficacy of these two controllers on reducing the wearer's loadings. The presented simulation paradigm can be utilized for virtual design of exoskeletons and pave the way to build optimized exoskeleton prototypes for experimental evaluation.