 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuasi-Direct Drive Actuation for a Lightweight Hip Exoskeleton with High Backdrivability and High Bandwidth
Paper and Code
Apr 01, 2020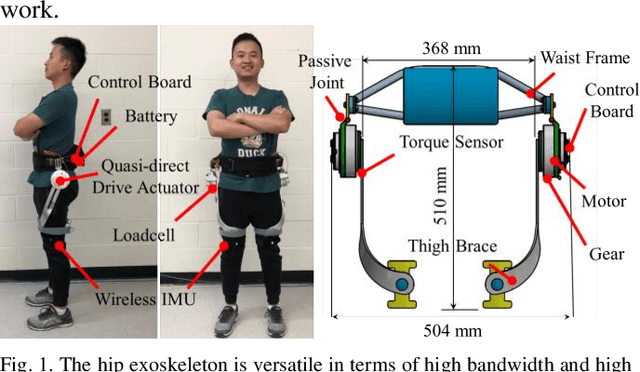
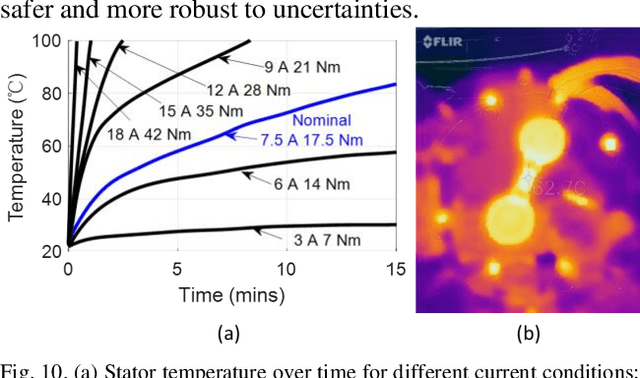
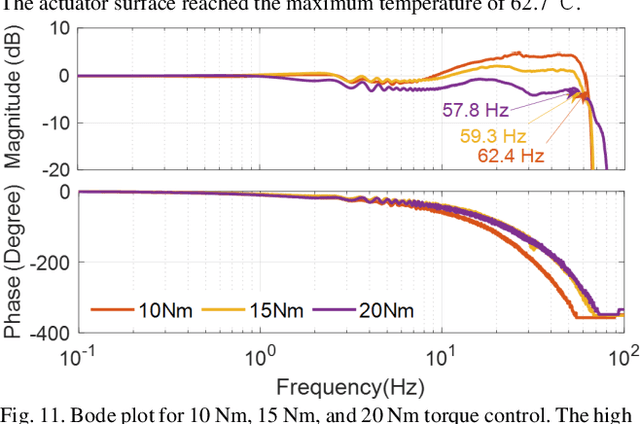
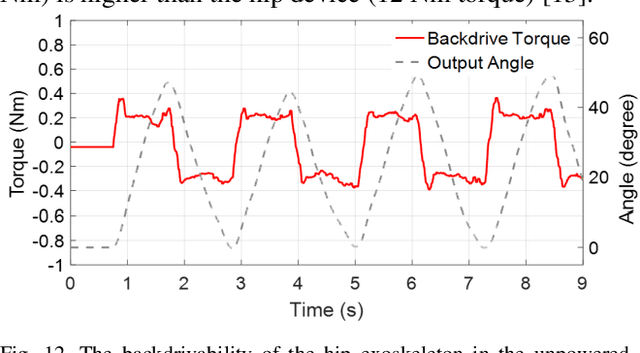
High-performance actuators are crucial to enable mechanical versatility of lower-limb wearable robots, which are required to be lightweight, highly backdrivable, and with high bandwidth. State-of-the-art actuators, e.g., series elastic actuators (SEAs), have to compromise bandwidth to improve compliance (i.e., backdrivability). In this paper, we describe the design and human-robot interaction modeling of a portable hip exoskeleton based on our custom quasi-direct drive (QDD) actuation (i.e., a high torque density motor with low ratio gear). We also present a model-based performance benchmark comparison of representative actuators in terms of torque capability, control bandwidth, backdrivability, and force tracking accuracy. This paper aims to corroborate the underlying philosophy of "design for control", namely meticulous robot design can simplify control algorithms while ensuring high performance. Following this idea, we create a lightweight bilateral hip exoskeleton (overall mass is 3.4 kg) to reduce joint loadings during normal activities, including walking and squatting. Experimental results indicate that the exoskeleton is able to produce high nominal torque (17.5 Nm), high backdrivability (0.4 Nm backdrive torque), high bandwidth (62.4 Hz), and high control accuracy (1.09 Nm root mean square tracking error, i.e., 5.4% of the desired peak torque). Its controller is versatile to assist walking at different speeds (0.8-1.4 m/s) and squatting at 2 s cadence. This work demonstrates significant improvement in backdrivability and control bandwidth compared with state-of-the-art exoskeletons powered by the conventional actuation or SEA.