 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Legged Soft Robot Platform for Dynamic Locomotion
Paper and Code
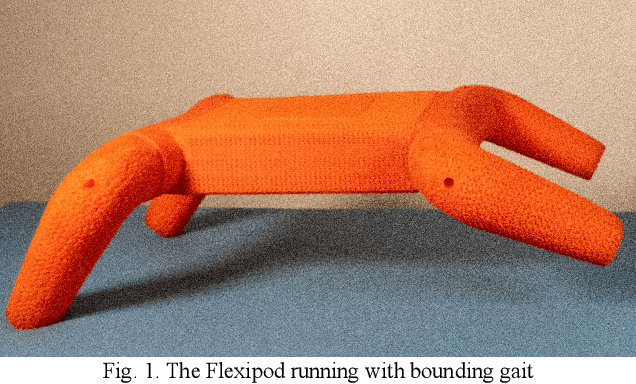
We present an open-source untethered quadrupedal soft robot platform for dynamic locomotion (e.g., high-speed running and backflipping). The robot is mostly soft (80 vol.%) while driven by four geared servo motors. The robot's soft body and soft legs were 3D printed with gyroid infill using a flexible material, enabling it to conform to the environment and passively stabilize during locomotion on multi-terrain environments. In addition, we simulated the robot in a real-time soft body simulation. With tuned gaits in simulation, the real robot can locomote at a speed of 0.9 m/s (2.5 body length/second), substantially faster than most untethered legged soft robots published to date. We hope this platform, along with its verified simulator, can catalyze the development of soft robotics.