 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForce-EvT: A Closer Look at Robotic Gripper Force Measurement with Event-based Vision Transformer
Apr 01, 2024
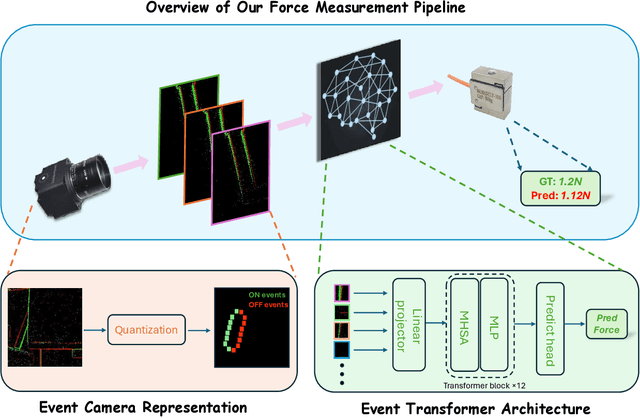
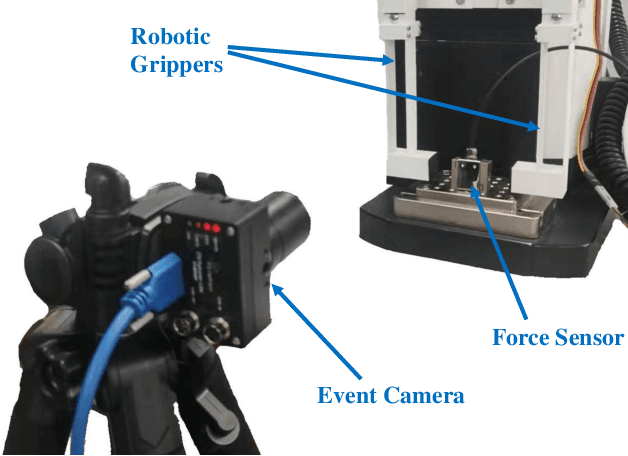

Robotic grippers are receiving increasing attention in various industries as essential components of robots for interacting and manipulating objects. While significant progress has been made in the past, conventional rigid grippers still have limitations in handling irregular objects and can damage fragile objects. We have shown that soft grippers offer deformability to adapt to a variety of object shapes and maximize object protection. At the same time, dynamic vision sensors (e.g., event-based cameras) are capable of capturing small changes in brightness and streaming them asynchronously as events, unlike RGB cameras, which do not perform well in low-light and fast-moving environments. In this paper, a dynamic-vision-based algorithm is proposed to measure the force applied to the gripper. In particular, we first set up a DVXplorer Lite series event camera to capture twenty-five sets of event data. Second, motivated by the impressive performance of the Vision Transformer (ViT) algorithm in dense image prediction tasks, we propose a new approach that demonstrates the potential for real-time force estimation and meets the requirements of real-world scenarios. We extensively evaluate the proposed algorithm on a wide range of scenarios and settings, and show that it consistently outperforms recent approaches.
Diffusion Attack: Leveraging Stable Diffusion for Naturalistic Image Attacking
Mar 21, 2024In Virtual Reality (VR), adversarial attack remains a significant security threat. Most deep learning-based methods for physical and digital adversarial attacks focus on enhancing attack performance by crafting adversarial examples that contain large printable distortions that are easy for human observers to identify. However, attackers rarely impose limitations on the naturalness and comfort of the appearance of the generated attack image, resulting in a noticeable and unnatural attack. To address this challenge, we propose a framework to incorporate style transfer to craft adversarial inputs of natural styles that exhibit minimal detectability and maximum natural appearance, while maintaining superior attack capabilities.
A Legged Soft Robot Platform for Dynamic Locomotion
Nov 13, 2020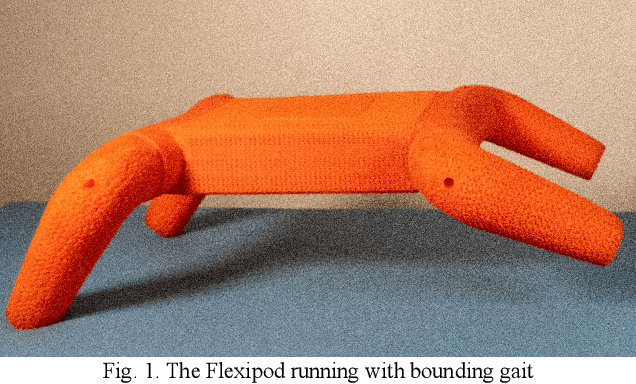
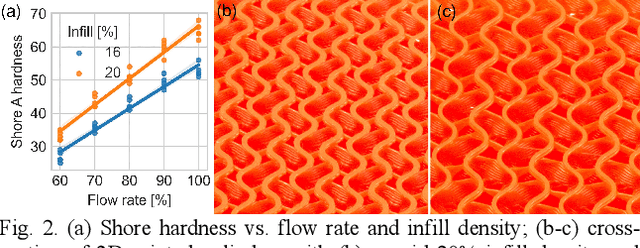
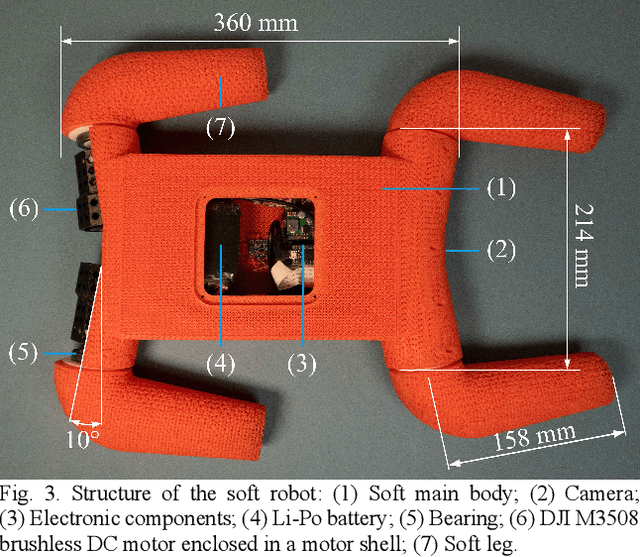
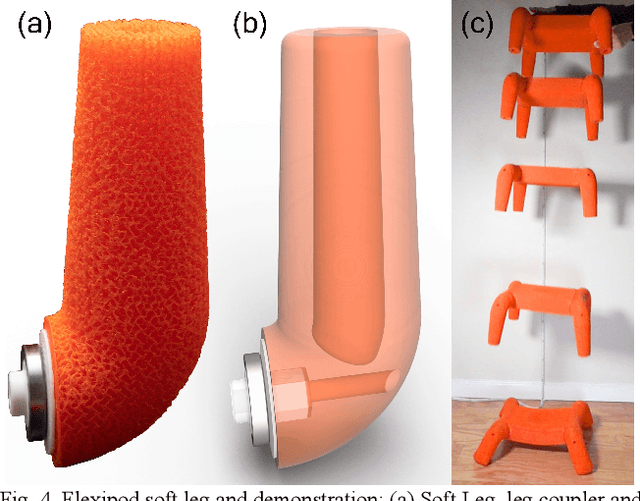
We present an open-source untethered quadrupedal soft robot platform for dynamic locomotion (e.g., high-speed running and backflipping). The robot is mostly soft (80 vol.%) while driven by four geared servo motors. The robot's soft body and soft legs were 3D printed with gyroid infill using a flexible material, enabling it to conform to the environment and passively stabilize during locomotion on multi-terrain environments. In addition, we simulated the robot in a real-time soft body simulation. With tuned gaits in simulation, the real robot can locomote at a speed of 0.9 m/s (2.5 body length/second), substantially faster than most untethered legged soft robots published to date. We hope this platform, along with its verified simulator, can catalyze the development of soft robotics.