 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForce-EvT: A Closer Look at Robotic Gripper Force Measurement with Event-based Vision Transformer
Apr 01, 2024
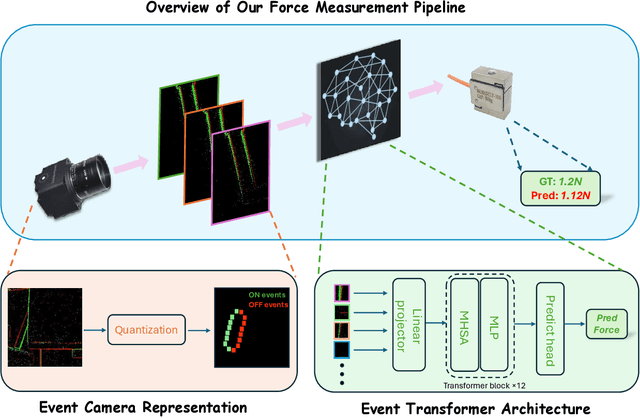
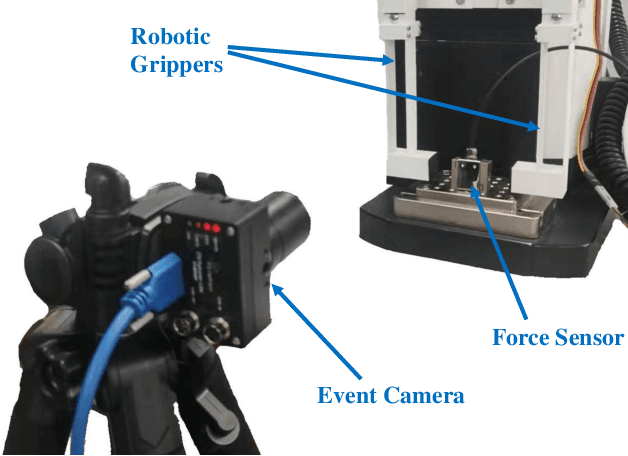

Robotic grippers are receiving increasing attention in various industries as essential components of robots for interacting and manipulating objects. While significant progress has been made in the past, conventional rigid grippers still have limitations in handling irregular objects and can damage fragile objects. We have shown that soft grippers offer deformability to adapt to a variety of object shapes and maximize object protection. At the same time, dynamic vision sensors (e.g., event-based cameras) are capable of capturing small changes in brightness and streaming them asynchronously as events, unlike RGB cameras, which do not perform well in low-light and fast-moving environments. In this paper, a dynamic-vision-based algorithm is proposed to measure the force applied to the gripper. In particular, we first set up a DVXplorer Lite series event camera to capture twenty-five sets of event data. Second, motivated by the impressive performance of the Vision Transformer (ViT) algorithm in dense image prediction tasks, we propose a new approach that demonstrates the potential for real-time force estimation and meets the requirements of real-world scenarios. We extensively evaluate the proposed algorithm on a wide range of scenarios and settings, and show that it consistently outperforms recent approaches.
Diffusion Attack: Leveraging Stable Diffusion for Naturalistic Image Attacking
Mar 21, 2024In Virtual Reality (VR), adversarial attack remains a significant security threat. Most deep learning-based methods for physical and digital adversarial attacks focus on enhancing attack performance by crafting adversarial examples that contain large printable distortions that are easy for human observers to identify. However, attackers rarely impose limitations on the naturalness and comfort of the appearance of the generated attack image, resulting in a noticeable and unnatural attack. To address this challenge, we propose a framework to incorporate style transfer to craft adversarial inputs of natural styles that exhibit minimal detectability and maximum natural appearance, while maintaining superior attack capabilities.
Real-Time Grasping Strategies Using Event Camera
Jul 15, 2021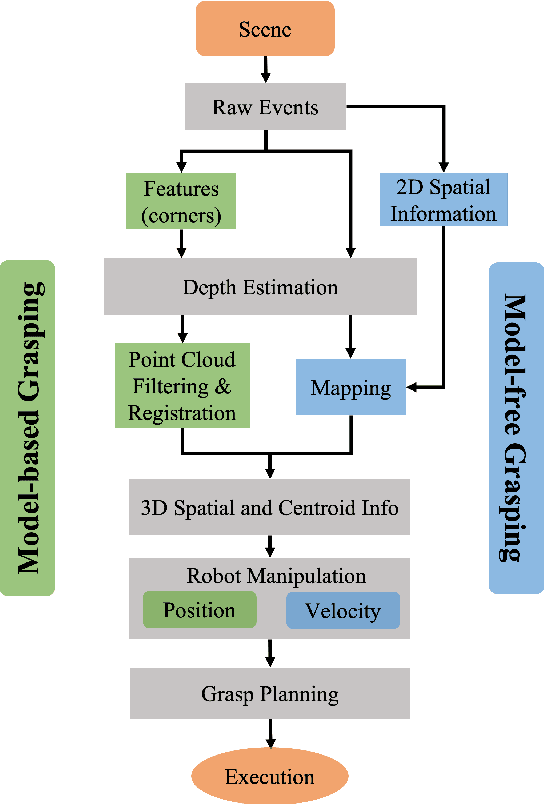

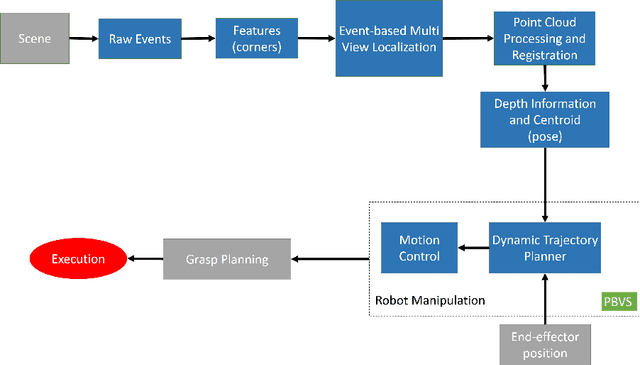

Robotic vision plays a key role for perceiving the environment in grasping applications. However, the conventional framed-based robotic vision, suffering from motion blur and low sampling rate, may not meet the automation needs of evolving industrial requirements. This paper, for the first time, proposes an event-based robotic grasping framework for multiple known and unknown objects in a cluttered scene. Compared with standard frame-based vision, neuromorphic vision has advantages of microsecond-level sampling rate and no motion blur. Building on that, the model-based and model-free approaches are developed for known and unknown objects' grasping respectively. For the model-based approach, event-based multi-view approach is used to localize the objects in the scene, and then point cloud processing allows for the clustering and registering of objects. Differently, the proposed model-free approach utilizes the developed event-based object segmentation, visual servoing and grasp planning to localize, align to, and grasp the targeting object. The proposed approaches are experimentally validated with objects of different sizes, using a UR10 robot with an eye-in-hand neuromorphic camera and a Barrett hand gripper. Moreover, the robustness of the two proposed event-based grasping approaches are validated in a low-light environment. This low-light operating ability shows a great advantage over the grasping using the standard frame-based vision. Furthermore, the developed model-free approach demonstrates the advantage of dealing with unknown object without prior knowledge compared to the proposed model-based approach.
Neuromorphic Eye-in-Hand Visual Servoing
Apr 15, 2020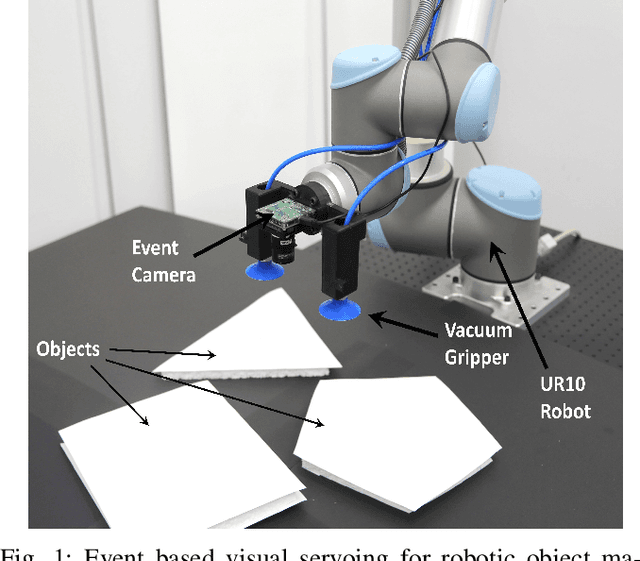
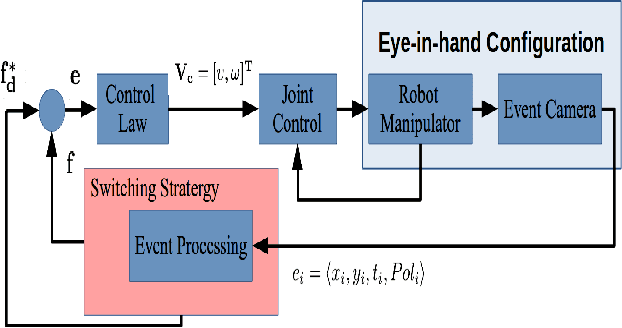
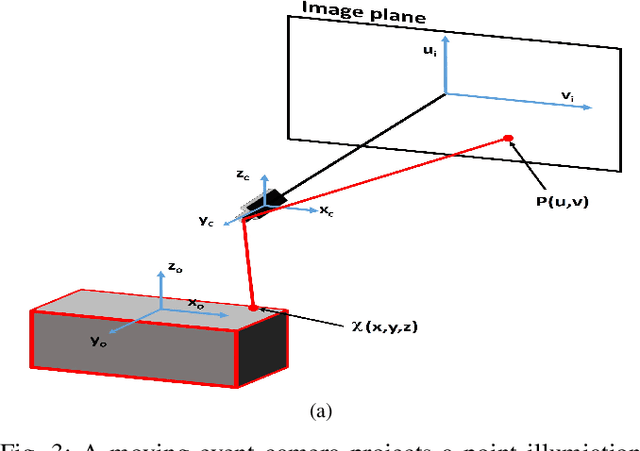
Robotic vision plays a major role in factory automation to service robot applications. However, the traditional use of frame-based camera sets a limitation on continuous visual feedback due to their low sampling rate and redundant data in real-time image processing, especially in the case of high-speed tasks. Event cameras give human-like vision capabilities such as observing the dynamic changes asynchronously at a high temporal resolution ($1\mu s$) with low latency and wide dynamic range. In this paper, we present a visual servoing method using an event camera and a switching control strategy to explore, reach and grasp to achieve a manipulation task. We devise three surface layers of active events to directly process stream of events from relative motion. A purely event based approach is adopted to extract corner features, localize them robustly using heat maps and generate virtual features for tracking and alignment. Based on the visual feedback, the motion of the robot is controlled to make the temporal upcoming event features converge to the desired event in spatio-temporal space. The controller switches its strategy based on the sequence of operation to establish a stable grasp. The event based visual servoing (EVBS) method is validated experimentally using a commercial robot manipulator in an eye-in-hand configuration. Experiments prove the effectiveness of the EBVS method to track and grasp objects of different shapes without the need for re-tuning.
Neuromorphic Event-Based Slip Detection and suppression in Robotic Grasping and Manipulation
Apr 15, 2020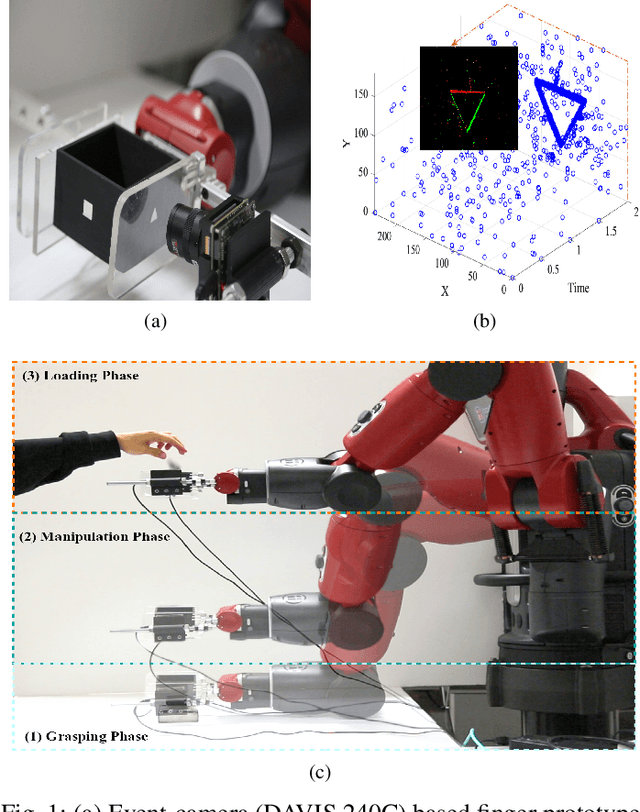
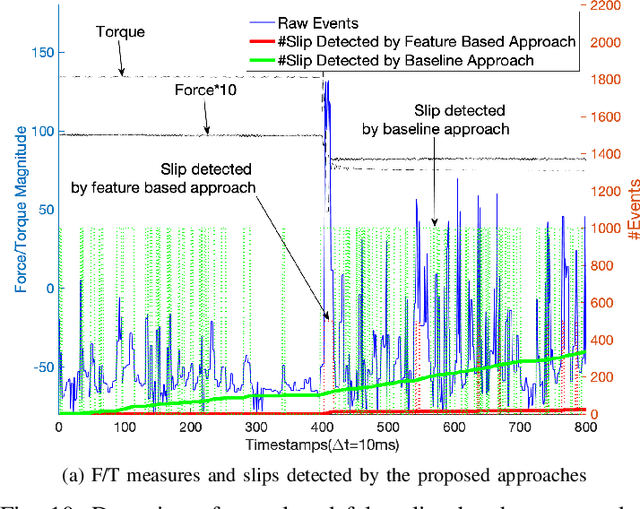
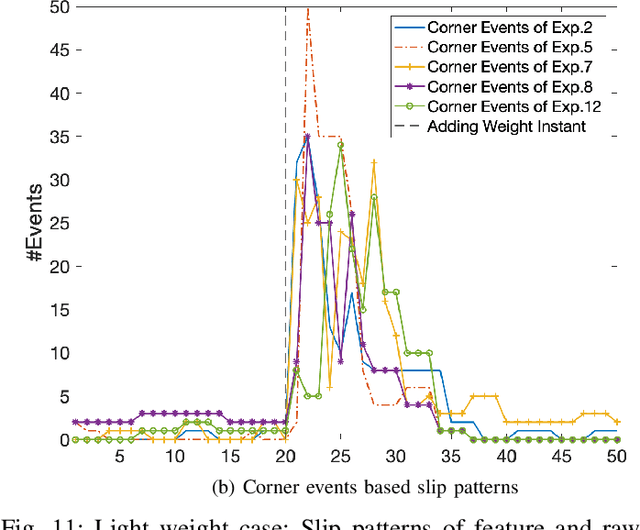
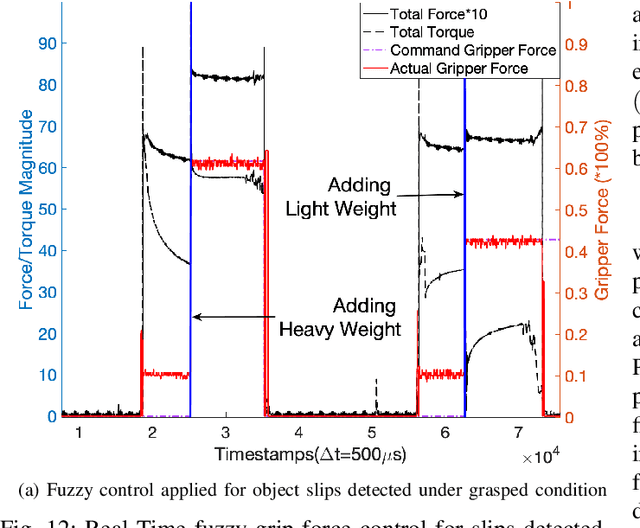
Slip detection is essential for robots to make robust grasping and fine manipulation. In this paper, a novel dynamic vision-based finger system for slip detection and suppression is proposed. We also present a baseline and feature based approach to detect object slips under illumination and vibration uncertainty. A threshold method is devised to autonomously sample noise in real-time to improve slip detection. Moreover, a fuzzy based suppression strategy using incipient slip feedback is proposed for regulating the grip force. A comprehensive experimental study of our proposed approaches under uncertainty and system for high-performance precision manipulation are presented. We also propose a slip metric to evaluate such performance quantitatively. Results indicate that the system can effectively detect incipient slip events at a sampling rate of 2kHz ($\Delta t = 500\mu s$) and suppress them before a gross slip occurs. The event-based approach holds promises to high precision manipulation task requirement in industrial manufacturing and household services.