 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatio-Temporal State Space Model For Efficient Event-Based Optical Flow
Jun 09, 2025Event cameras unlock new frontiers that were previously unthinkable with standard frame-based cameras. One notable example is low-latency motion estimation (optical flow), which is critical for many real-time applications. In such applications, the computational efficiency of algorithms is paramount. Although recent deep learning paradigms such as CNN, RNN, or ViT have shown remarkable performance, they often lack the desired computational efficiency. Conversely, asynchronous event-based methods including SNNs and GNNs are computationally efficient; however, these approaches fail to capture sufficient spatio-temporal information, a powerful feature required to achieve better performance for optical flow estimation. In this work, we introduce Spatio-Temporal State Space Model (STSSM) module along with a novel network architecture to develop an extremely efficient solution with competitive performance. Our STSSM module leverages state-space models to effectively capture spatio-temporal correlations in event data, offering higher performance with lower complexity compared to ViT, CNN-based architectures in similar settings. Our model achieves 4.5x faster inference and 8x lower computations compared to TMA and 2x lower computations compared to EV-FlowNet with competitive performance on the DSEC benchmark. Our code will be available at https://github.com/AhmedHumais/E-STMFlow
EV-LayerSegNet: Self-supervised Motion Segmentation using Event Cameras
Jun 07, 2025Event cameras are novel bio-inspired sensors that capture motion dynamics with much higher temporal resolution than traditional cameras, since pixels react asynchronously to brightness changes. They are therefore better suited for tasks involving motion such as motion segmentation. However, training event-based networks still represents a difficult challenge, as obtaining ground truth is very expensive, error-prone and limited in frequency. In this article, we introduce EV-LayerSegNet, a self-supervised CNN for event-based motion segmentation. Inspired by a layered representation of the scene dynamics, we show that it is possible to learn affine optical flow and segmentation masks separately, and use them to deblur the input events. The deblurring quality is then measured and used as self-supervised learning loss. We train and test the network on a simulated dataset with only affine motion, achieving IoU and detection rate up to 71% and 87% respectively.
SlipNet: Slip Cost Map for Autonomous Navigation on Heterogeneous Deformable Terrains
Sep 03, 2024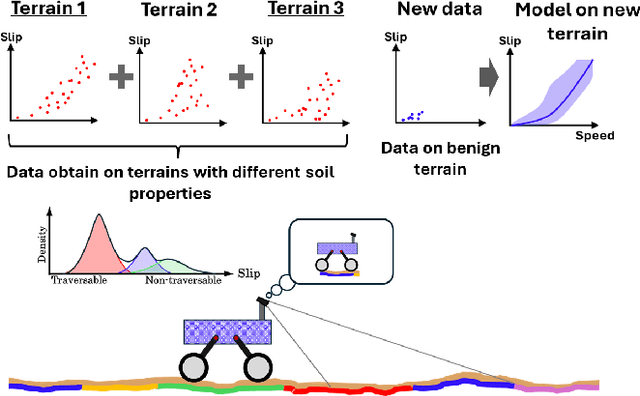
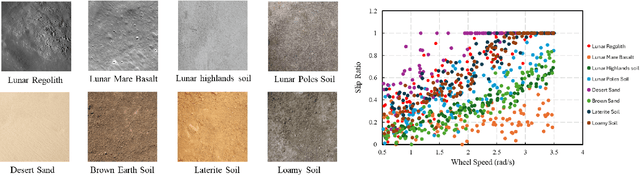
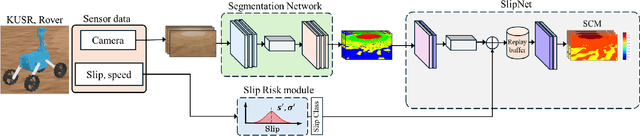
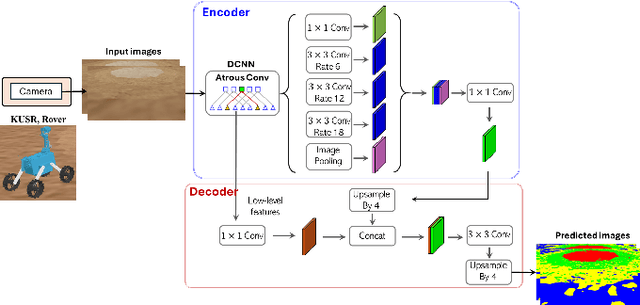
Autonomous space rovers face significant challenges when navigating deformable and heterogeneous terrains during space exploration. The variability in terrain types, influenced by different soil properties, often results in severe wheel slip, compromising navigation efficiency and potentially leading to entrapment. This paper proposes SlipNet, an approach for predicting slip in segmented regions of heterogeneous deformable terrain surfaces to enhance navigation algorithms. Unlike previous methods, SlipNet does not depend on prior terrain classification, reducing prediction errors and misclassifications through dynamic terrain segmentation and slip assignment during deployment while maintaining a history of terrain classes. This adaptive reclassification mechanism has improved prediction performance. Extensive simulation results demonstrate that our model (DeepLab v3+ + SlipNet) achieves better slip prediction performance than the TerrainNet, with a lower mean absolute error (MAE) in five terrain sample tests.
Neuromorphic Vision-based Motion Segmentation with Graph Transformer Neural Network
Apr 16, 2024



Moving object segmentation is critical to interpret scene dynamics for robotic navigation systems in challenging environments. Neuromorphic vision sensors are tailored for motion perception due to their asynchronous nature, high temporal resolution, and reduced power consumption. However, their unconventional output requires novel perception paradigms to leverage their spatially sparse and temporally dense nature. In this work, we propose a novel event-based motion segmentation algorithm using a Graph Transformer Neural Network, dubbed GTNN. Our proposed algorithm processes event streams as 3D graphs by a series of nonlinear transformations to unveil local and global spatiotemporal correlations between events. Based on these correlations, events belonging to moving objects are segmented from the background without prior knowledge of the dynamic scene geometry. The algorithm is trained on publicly available datasets including MOD, EV-IMO, and \textcolor{black}{EV-IMO2} using the proposed training scheme to facilitate efficient training on extensive datasets. Moreover, we introduce the Dynamic Object Mask-aware Event Labeling (DOMEL) approach for generating approximate ground-truth labels for event-based motion segmentation datasets. We use DOMEL to label our own recorded Event dataset for Motion Segmentation (EMS-DOMEL), which we release to the public for further research and benchmarking. Rigorous experiments are conducted on several unseen publicly-available datasets where the results revealed that GTNN outperforms state-of-the-art methods in the presence of dynamic background variations, motion patterns, and multiple dynamic objects with varying sizes and velocities. GTNN achieves significant performance gains with an average increase of 9.4% and 4.5% in terms of motion segmentation accuracy (IoU%) and detection rate (DR%), respectively.
Force-EvT: A Closer Look at Robotic Gripper Force Measurement with Event-based Vision Transformer
Apr 01, 2024
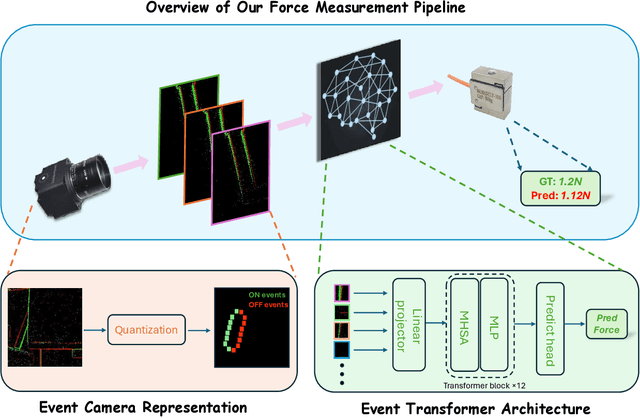
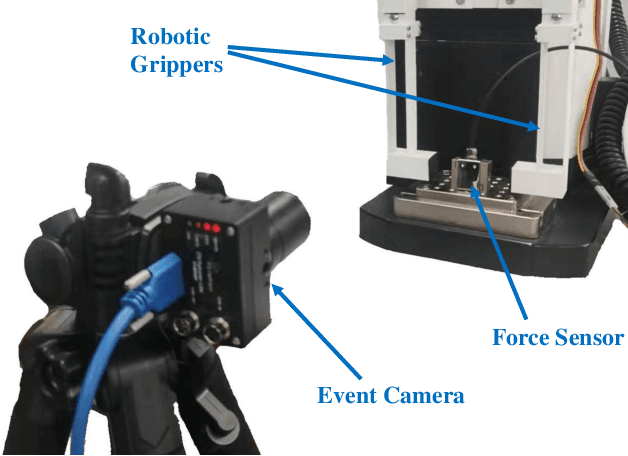

Robotic grippers are receiving increasing attention in various industries as essential components of robots for interacting and manipulating objects. While significant progress has been made in the past, conventional rigid grippers still have limitations in handling irregular objects and can damage fragile objects. We have shown that soft grippers offer deformability to adapt to a variety of object shapes and maximize object protection. At the same time, dynamic vision sensors (e.g., event-based cameras) are capable of capturing small changes in brightness and streaming them asynchronously as events, unlike RGB cameras, which do not perform well in low-light and fast-moving environments. In this paper, a dynamic-vision-based algorithm is proposed to measure the force applied to the gripper. In particular, we first set up a DVXplorer Lite series event camera to capture twenty-five sets of event data. Second, motivated by the impressive performance of the Vision Transformer (ViT) algorithm in dense image prediction tasks, we propose a new approach that demonstrates the potential for real-time force estimation and meets the requirements of real-world scenarios. We extensively evaluate the proposed algorithm on a wide range of scenarios and settings, and show that it consistently outperforms recent approaches.
A Novel Bioinspired Neuromorphic Vision-based Tactile Sensor for Fast Tactile Perception
Mar 15, 2024Tactile sensing represents a crucial technique that can enhance the performance of robotic manipulators in various tasks. This work presents a novel bioinspired neuromorphic vision-based tactile sensor that uses an event-based camera to quickly capture and convey information about the interactions between robotic manipulators and their environment. The camera in the sensor observes the deformation of a flexible skin manufactured from a cheap and accessible 3D printed material, whereas a 3D printed rigid casing houses the components of the sensor together. The sensor is tested in a grasping stage classification task involving several objects using a data-driven learning-based approach. The results show that the proposed approach enables the sensor to detect pressing and slip incidents within a speed of 2 ms. The fast tactile perception properties of the proposed sensor makes it an ideal candidate for safe grasping of different objects in industries that involve high-speed pick-and-place operations.
Asynchronous Bioplausible Neuron for Spiking Neural Networks for Event-Based Vision
Nov 20, 2023



Spiking Neural Networks (SNNs) offer a biologically inspired approach to computer vision that can lead to more efficient processing of visual data with reduced energy consumption. However, maintaining homeostasis within these networks is challenging, as it requires continuous adjustment of neural responses to preserve equilibrium and optimal processing efficiency amidst diverse and often unpredictable input signals. In response to these challenges, we propose the Asynchronous Bioplausible Neuron (ABN), a dynamic spike firing mechanism to auto-adjust the variations in the input signal. Comprehensive evaluation across various datasets demonstrates ABN's enhanced performance in image classification and segmentation, maintenance of neural equilibrium, and energy efficiency.
Fuzzy Ensembles of Reinforcement Learning Policies for Robotic Systems with Varied Parameters
Nov 08, 2023



Reinforcement Learning (RL) is an emerging approach to control many dynamical systems for which classical control approaches are not applicable or insufficient. However, the resultant policies may not generalize to variations in the parameters that the system may exhibit. This paper presents a powerful yet simple algorithm in which collaboration is facilitated between RL agents that are trained independently to perform the same task but with different system parameters. The independency among agents allows the exploitation of multi-core processing to perform parallel training. Two examples are provided to demonstrate the effectiveness of the proposed technique. The main demonstration is performed on a quadrotor with slung load tracking problem in a real-time experimental setup. It is shown that integrating the developed algorithm outperforms individual policies by reducing the RMSE tracking error. The robustness of the ensemble is also verified against wind disturbance.
Advance Simulation Method for Wheel-Terrain Interactions of Space Rovers: A Case Study on the UAE Rashid Rover
Aug 23, 2023A thorough analysis of wheel-terrain interaction is critical to ensure the safe and efficient operation of space rovers on extraterrestrial surfaces like the Moon or Mars. This paper presents an approach for developing and experimentally validating a virtual wheel-terrain interaction model for the UAE Rashid rover. The model aims to improve the fidelity and capability of current simulation methods for space rovers and facilitate the design, evaluation, and control of their locomotion systems. The proposed method considers various factors, such as wheel grouser properties, wheel slippage, loose soil properties, and interaction mechanics. The model accuracy was validated through experiments on a Test-rig testbed that simulated lunar soil conditions. In specific, a set of experiments was carried out to test the behaviors acted on a Grouser-Rashid rover wheel by the lunar soil with different slip ratios of 0, 0.25, 0.50, and 0.75. The obtained results demonstrate that the proposed simulation method provides a more accurate and realistic simulation of the wheel-terrain interaction behavior and provides insight into the overall performance of the rover
E-Calib: A Fast, Robust and Accurate Calibration Toolbox for Event Cameras
Jun 15, 2023Event cameras triggered a paradigm shift in the computer vision community delineated by their asynchronous nature, low latency, and high dynamic range. Calibration of event cameras is always essential to account for the sensor intrinsic parameters and for 3D perception. However, conventional image-based calibration techniques are not applicable due to the asynchronous, binary output of the sensor. The current standard for calibrating event cameras relies on either blinking patterns or event-based image reconstruction algorithms. These approaches are difficult to deploy in factory settings and are affected by noise and artifacts degrading the calibration performance. To bridge these limitations, we present E-Calib, a novel, fast, robust, and accurate calibration toolbox for event cameras utilizing the asymmetric circle grid, for its robustness to out-of-focus scenes. The proposed method is tested in a variety of rigorous experiments for different event camera models, on circle grids with different geometric properties, and under challenging illumination conditions. The results show that our approach outperforms the state-of-the-art in detection success rate, reprojection error, and estimation accuracy of extrinsic parameters.