 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMasked Sequence Autoencoding for Enhanced Defect Visualization in Active Infrared Thermography
Dec 28, 2025Active infrared thermography (AIRT) became a crucial tool in aerospace non-destructive testing (NDT), enabling the detection of hidden defects and anomalies in materials by capturing thermal responses over time. In AIRT, autoencoders are widely used to enhance defect detection by reducing the dimensionality of thermal data and improving the signal-to-noise ratio. However, traditional AIRT autoencoders often struggle to disentangle subtle defect features from dominant background responses, leading to suboptimal defect analysis under varying material and inspection conditions. To overcome this challenge, this work proposes a Masked CNN-Attention Autoencoder (AIRT-Masked-CAAE) that integrates convolutional feature extraction with attention mechanisms to capture both local thermal patterns and global contextual dependencies. The AIRT-Masked-CAAE introduces a masked sequence autoencoding strategy, where the network learns to infer missing thermal responses from surrounding contextual cues, while suppressing background redundancy. In addition, the proposed masked sequence autoencoding approach enables training on only a subset of the thermal sequence, while providing generalizable latent representations and reducing training time by a factor of 30. The AIRT-Masked-CAAE framework was evaluated using specimens made of PVC, CFRP, and PLA. The results demonstrate that the AIRT-Masked-CAAE surpasses state-of-the-art AIRT autoencoders in terms of contrast, signal-to-noise ratio (SNR), and metrics based on neural networks.
PCA-Guided Autoencoding for Structured Dimensionality Reduction in Active Infrared Thermography
Aug 11, 2025Active Infrared thermography (AIRT) is a widely adopted non-destructive testing (NDT) technique for detecting subsurface anomalies in industrial components. Due to the high dimensionality of AIRT data, current approaches employ non-linear autoencoders (AEs) for dimensionality reduction. However, the latent space learned by AIRT AEs lacks structure, limiting their effectiveness in downstream defect characterization tasks. To address this limitation, this paper proposes a principal component analysis guided (PCA-guided) autoencoding framework for structured dimensionality reduction to capture intricate, non-linear features in thermographic signals while enforcing a structured latent space. A novel loss function, PCA distillation loss, is introduced to guide AIRT AEs to align the latent representation with structured PCA components while capturing the intricate, non-linear patterns in thermographic signals. To evaluate the utility of the learned, structured latent space, we propose a neural network-based evaluation metric that assesses its suitability for defect characterization. Experimental results show that the proposed PCA-guided AE outperforms state-of-the-art dimensionality reduction methods on PVC, CFRP, and PLA samples in terms of contrast, signal-to-noise ratio (SNR), and neural network-based metrics.
Multi-Modal Attention Networks for Enhanced Segmentation and Depth Estimation of Subsurface Defects in Pulse Thermography
Jan 17, 2025



AI-driven pulse thermography (PT) has become a crucial tool in non-destructive testing (NDT), enabling automatic detection of hidden anomalies in various industrial components. Current state-of-the-art techniques feed segmentation and depth estimation networks compressed PT sequences using either Principal Component Analysis (PCA) or Thermographic Signal Reconstruction (TSR). However, treating these two modalities independently constrains the performance of PT inspection models as these representations possess complementary semantic features. To address this limitation, this work proposes PT-Fusion, a multi-modal attention-based fusion network that fuses both PCA and TSR modalities for defect segmentation and depth estimation of subsurface defects in PT setups. PT-Fusion introduces novel feature fusion modules, Encoder Attention Fusion Gate (EAFG) and Attention Enhanced Decoding Block (AEDB), to fuse PCA and TSR features for enhanced segmentation and depth estimation of subsurface defects. In addition, a novel data augmentation technique is proposed based on random data sampling from thermographic sequences to alleviate the scarcity of PT datasets. The proposed method is benchmarked against state-of-the-art PT inspection models, including U-Net, attention U-Net, and 3D-CNN on the Universit\'e Laval IRT-PVC dataset. The results demonstrate that PT-Fusion outperforms the aforementioned models in defect segmentation and depth estimation accuracies with a margin of 10%.
E-Calib: A Fast, Robust and Accurate Calibration Toolbox for Event Cameras
Jun 15, 2023Event cameras triggered a paradigm shift in the computer vision community delineated by their asynchronous nature, low latency, and high dynamic range. Calibration of event cameras is always essential to account for the sensor intrinsic parameters and for 3D perception. However, conventional image-based calibration techniques are not applicable due to the asynchronous, binary output of the sensor. The current standard for calibrating event cameras relies on either blinking patterns or event-based image reconstruction algorithms. These approaches are difficult to deploy in factory settings and are affected by noise and artifacts degrading the calibration performance. To bridge these limitations, we present E-Calib, a novel, fast, robust, and accurate calibration toolbox for event cameras utilizing the asymmetric circle grid, for its robustness to out-of-focus scenes. The proposed method is tested in a variety of rigorous experiments for different event camera models, on circle grids with different geometric properties, and under challenging illumination conditions. The results show that our approach outperforms the state-of-the-art in detection success rate, reprojection error, and estimation accuracy of extrinsic parameters.
High Speed Neuromorphic Vision-Based Inspection of Countersinks in Automated Manufacturing Processes
Apr 08, 2023Countersink inspection is crucial in various automated assembly lines, especially in the aerospace and automotive sectors. Advancements in machine vision introduced automated robotic inspection of countersinks using laser scanners and monocular cameras. Nevertheless, the aforementioned sensing pipelines require the robot to pause on each hole for inspection due to high latency and measurement uncertainties with motion, leading to prolonged execution times of the inspection task. The neuromorphic vision sensor, on the other hand, has the potential to expedite the countersink inspection process, but the unorthodox output of the neuromorphic technology prohibits utilizing traditional image processing techniques. Therefore, novel event-based perception algorithms need to be introduced. We propose a countersink detection approach on the basis of event-based motion compensation and the mean-shift clustering principle. In addition, our framework presents a robust event-based circle detection algorithm to precisely estimate the depth of the countersink specimens. The proposed approach expedites the inspection process by a factor of 10$\times$ compared to conventional countersink inspection methods. The work in this paper was validated for over 50 trials on three countersink workpiece variants. The experimental results show that our method provides a precision of 0.025 mm for countersink depth inspection despite the low resolution of commercially available neuromorphic cameras.
A Neuromorphic Vision-Based Measurement for Robust Relative Localization in Future Space Exploration Missions
Jun 23, 2022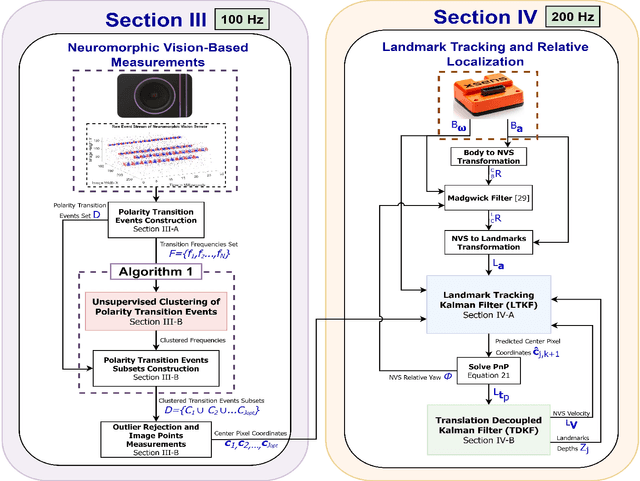
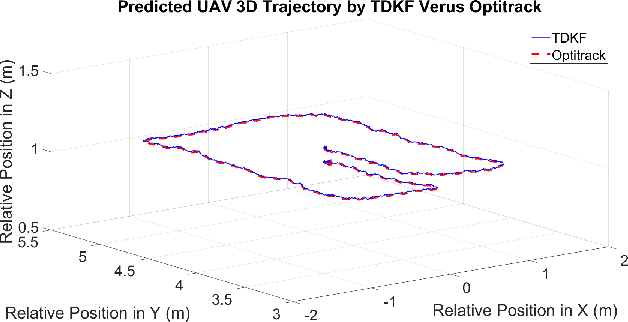
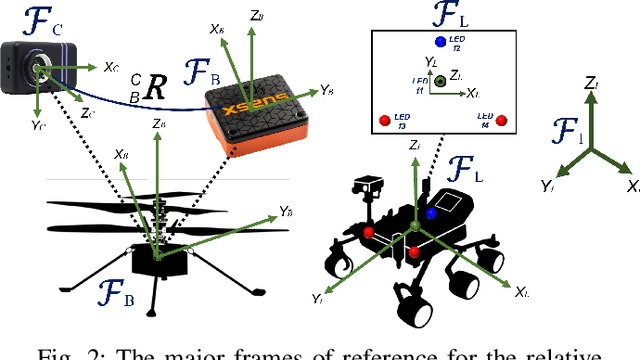
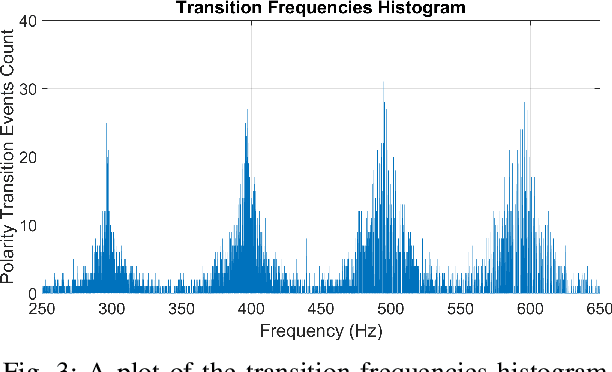
Space exploration has witnessed revolutionary changes upon landing of the Perseverance Rover on the Martian surface and demonstrating the first flight beyond Earth by the Mars helicopter, Ingenuity. During their mission on Mars, Perseverance Rover and Ingenuity collaboratively explore the Martian surface, where Ingenuity scouts terrain information for rover's safe traversability. Hence, determining the relative poses between both the platforms is of paramount importance for the success of this mission. Driven by this necessity, this work proposes a robust relative localization system based on a fusion of neuromorphic vision-based measurements (NVBMs) and inertial measurements. The emergence of neuromorphic vision triggered a paradigm shift in the computer vision community, due to its unique working principle delineated with asynchronous events triggered by variations of light intensities occurring in the scene. This implies that observations cannot be acquired in static scenes due to illumination invariance. To circumvent this limitation, high frequency active landmarks are inserted in the scene to guarantee consistent event firing. These landmarks are adopted as salient features to facilitate relative localization. A novel event-based landmark identification algorithm using Gaussian Mixture Models (GMM) is developed for matching the landmarks correspondences formulating our NVBMs. The NVBMs are fused with inertial measurements in proposed state estimators, landmark tracking Kalman filter (LTKF) and translation decoupled Kalman filter (TDKF) for landmark tracking and relative localization, respectively. The proposed system was tested in a variety of experiments and has outperformed state-of-the-art approaches in accuracy and range.